Изобретение относится к автоматическому управлению производственными процессами и может быть применено в цифровых системах автг)матического управления позиционированием различных перемеш,аюш,ихся объектов.
Цель изобретения - расширение функциональных возможностей, обеспечиваемое формированием двуполярного напряжения управления двигателем с установкой нулевого напряжения при достижении точки позиционирования, регулировкой максимальной скорости перемещения и возможностью схемной реализации для работы как с двоичным, так и двоично-десятичными кодами и упрондение резистивной матрицы преобра- зователя код-аналог.
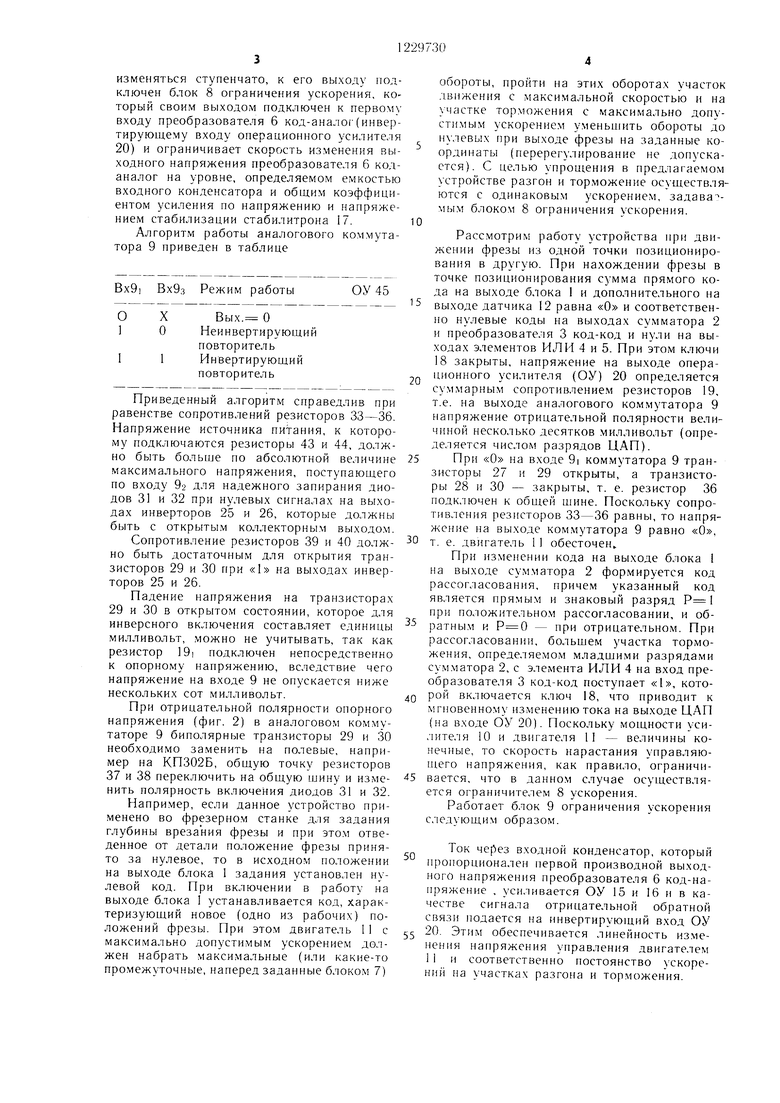
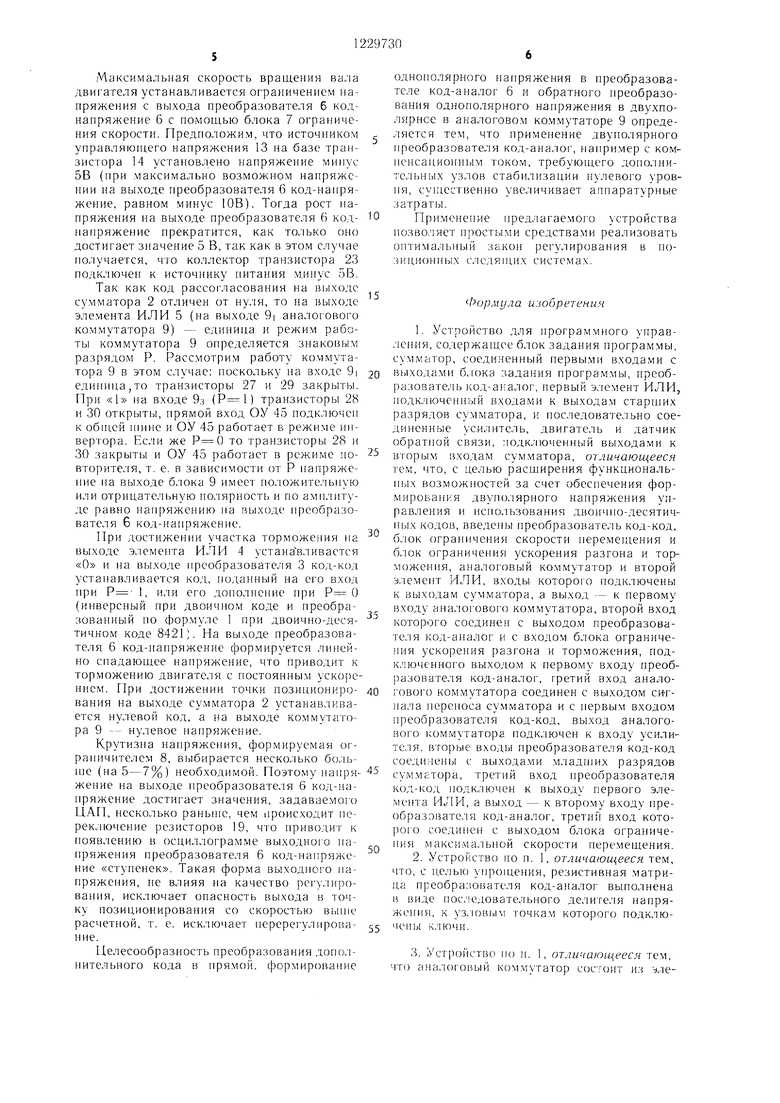
На фиг. 1 представлена схема устройства для программного управления; на фиг. 2 - схема преобразователя код-аналог; на фиг. 3 - схема аналогового коммутатора.
Устройство содержит блок 1 задания нрО1 раммы, сумматор 2, преобразователь 3 код-код, первый 4 и второй 5 элементы ИЛИ, преобразователь 6 код-аналог, блок 7 ограничения скорости пере.мещения и блок 8 ограничения ускорения разгона и торможения, аналоговый коммутатор 9, усилитель 10, двигатель 11 и датчик 12 обратной связи.
В состав блока ограничения скорости входят источник 13 управляющего напряжения и усилитель 14 мощности на транзисторе.
В состав блока ограничения ускорения разгона и торможения входят дифференци- РУЮН1ИЙ усилитель 15, усилитель 16 напряжения и двуханодный стабилитрон 17.
Иреобразователь код-аналог содержит ключи ISo,..., 18,ь резистивную матрицу с ве- совыми резисторами 19|,...,19„, операционный усилитель 20, первый 21 и второй 22 резисторы и усилитель мощности на транзисторе 23.
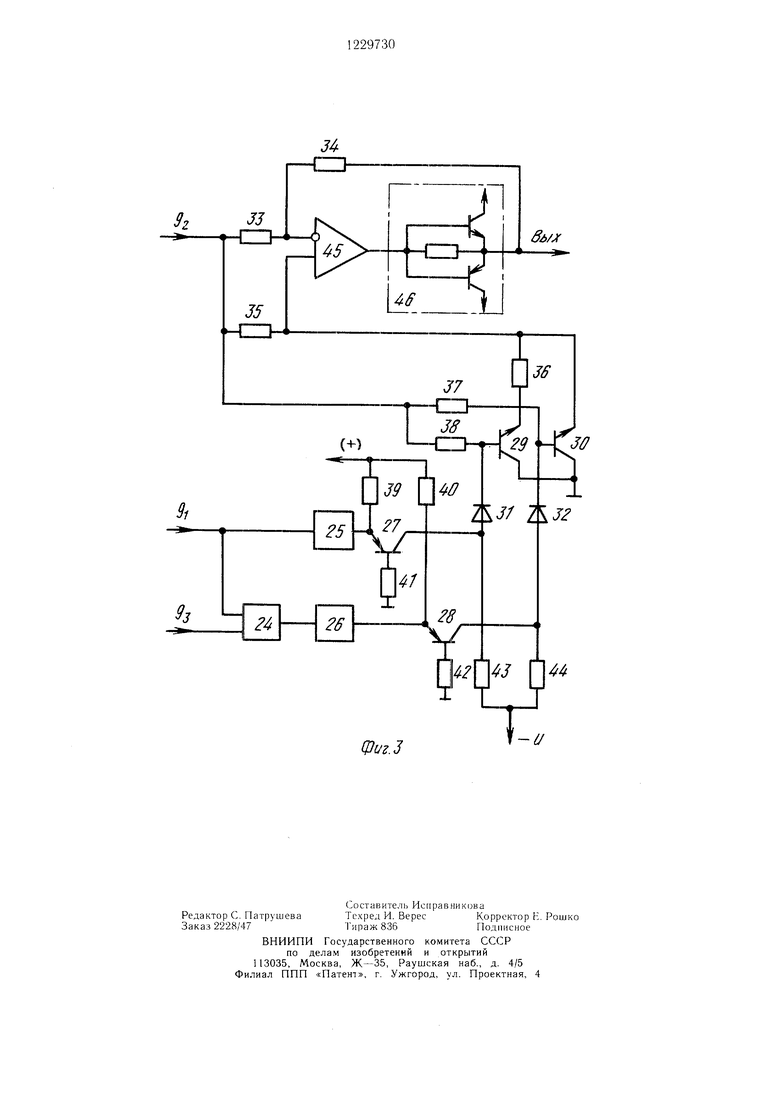
Аналоговый коммутатор содержит элемент И - НЕ 24, первый 25 и второй 26 ин- нсрторы, транзисторы 27, 28, 29, 30, первый 31 и второй 32 диоды, резисторы 33-44, операционный усилитель 45 и усилитель 46 мощности.
На фиг. 1 обозначены 6i, 62, 6я - входы преобразователя код-аналог, 9|, 92, 9з - входы аналогового коммутатора. Источник 13 управляющего напряжения при ручном задании скорости представляет собой iiOiCiiUifoMOTp при плавной регулировке или псрск.иочято.ть розистивным делителем - при дискретном задании скорости, при программном задании скорости - преобразователь код-напряж.ения.
Устройство работает следующим образом.
При подаче на первые входы сумматора 2 задания с блока 1 задания програм- мы в виде дополнительного кода Мз, а на вторые - прямого кода М фактического положения об ьекта регулирования с датчика
0
12 обратной связи, на выходах сумматора 2 формируется код разности .Vp N3-Л п, величина которого характеризует рассогласование, а знак переноса Р - направление вращения вала двигателя 11 для отработки рассогласования.
При Л/3 Л п на выходах сумматора 2 формируется дополнительный код и , при yV.3 N,1, - прямой код и .
Сигналы с п младщих разрядов сумматора 2 подаются на входы преобразователя 3 код-код, на выходах которого формируется или код по сигналу с первого блока элементов ИЛИ 4, определяющего участок движения с максимальной скоростью, или прямой код разности /Vp при Л/р, меньшем или равном участку торможения (дополнительный код при двоично-десятичном коде 1248 преобразуется в прямой согласно логическим выр ажениям:
Q,B Q,P+ OiP; Q2B 02; Q3B Q3.P iQ2Q3+ Q2Q3)P;
Q4B Q4P+ Q2Q3Q4P).(1).
Выходным кодом преобразователя 3 код-код, начиная со второго разряда, управляются ключи 18 преобразователя 6 код-аналог 6.
Сопротивления резисторов 19 определяются из выражений
5
0
к V 9Л/о/2 для двоичного кода на выходе преобразователя коп-код 3 и ..
. К д/(л/о/23 з «- «-1)- Г
для дво ично-десятичного кода 1248, где /С - произвольно выбираемый коэффициент пропорциональности; q -дискретность перемещения; NO-число, пропорциональное коду на входе преобразователя 6 код-аналог соответствующее максимальной скорости;
; - порядковый номер двоичного разряда (в пределах декады для двоично-десятичного кода); а - порядковый номер декады. Например, при q 0,01, .0 512 и /( Ю Кг для двоичного кода имеет: .R,9i + ...-l- , 22,627-10 Ом;
Ri95 10-10 1,41 103 Ом. Для двоично-десятичного кода при q 0,01, Л о 400.
...+Я19„ 20-10-Юм; +
1,41-10 Ом.
Ограничение скорости перемещения осуществляется установкой на базе транзистора 14 необходимого напряжения, так как выходное напряжение на выходе преобразователя 6 код-аналог (эмиттер транзистора 23) не может быть больше напряжения на эмиттере транзистора 14.
Поскольку напряжение на выходе преобразователя 6 код-аналог имеет тенденцию
изменяться ступенчато, к его выходу подключен блок 8 ограничения ускорения, который своим выходом подключен к первому входу преобразователя 6 код-аналог(инвертирующему входу операционного усилителя 20) и ограничивает скорость изменения выходного напряжения преобразователя 6 код- аналог на уровне, определяемом емкостью входного конденсатора и общим коэффициентом усиления по напряжению и напряжением стабилизации стабилитрона 17.
Алгоритм работы аналогового коммутатора 9 приведен в таблице
ВхЭ Вх9з Режим работы
XВых. О
ОНеинвертирующий
повторитель
1Инвертируюиций
повторитель
Приведенный алгоритм справедлив при равенстве сопротивлений резисторов 33-36. Напряжение источника питания, к которому подключаются резисторы 43 и 44, должно быть больше по абсолютной величине максимального напряжения, поступающего по входу 92 для надежного запирания диодов 31 и 32 при нулевых сигналах на выходах инверторов 25 и 26, которые должны быть с открытым коллекторны.м выходо.м.
Сопротивление резисторов 39 и 40 долж- но быть достаточным для открытия транзисторов 29 и 30 при «1 на выходах инверторов 25 и 26.
Падение напряжения на транзисторах 29 и 30 в открытом состоянии, которое д,1я инверсного включения составляет единицы милливольт, .можно не учитывать, так как резистор 9i подключен непосредственно к опорному напряжению, вследствие чего напряжение на входе 9 не опускается ниже нескольких сот милливольт.
При отрицательной полярности опорного напряжения (фиг. 2) в аналоговом коммутаторе 9 биполярные транзисторы 29 и 30 необходимо за.менить на полевые, например на КП302Б, общую точку резисторов 37 и 38 переключить на общую щину и изме- нить полярность включения диодов 31 и 32.
Например, если данное устройство применено во фрезерном станке для задания глубины врезания фрезы и при этом отведенное от детали положение фрезы принято за нулевое, то в исходном положении на выходе блока 1 задания установлен нулевой код. При включении в работу на выходе блока 1 устанавливается код, характеризующий новое (одно из рабочих) положений фрезы. При этом двигатель 11с максимально допустимым ускорением должен набрать максимальные (или какие-то промежуточные, наперед заданные блоком 7)
10
15
20
35
25
40
5
50
обороты, пройти на этих оборотах участок движения с максимальной скоростью и на участке торможения с максимально допустимым ускорением уменьшить обороты до нулевых при выходе фрезы на заданные координаты (перерегулирование не допускается). С целью упрощения в предлагаемом устройстве разгон и торможение осуществляются с одинаковым ускорением, задава - мым блоком 8 ограничения ускорения.
Рассмотрим работу устройства нри движении фрезы из одной точки позиционирования в другую. При нахождении фрезы в точке позиционирования сумма прямого кода на выходе блока 1 и дополнительного на выходе датчика 12 равна «О и соответственно нулевые коды на выходах сумматора 2 и преобразователя 3 код-код и нули на выходах элементов ИЛИ 4 и 5. При этом ключи 18 закрыты, напряжение на выходе операционного уси,лителя (ОУ) 20 определяется суммарным сопротив,пением резисторов 19, т.е. на выходе аналогового коммутатора 9 напряжение отрицательной полярности величиной несколько десятков милливольт (определяется числом разрядов ЦАП).
При «О на входе 9i коммутатора 9 транзисторы 27 и 29 открыты, а транзисторы 28 и 30 - закрыты, т. е. резистор 36 подключен к общей щине. Поскольку сопротивления резисторов 33-36 равны, то напряжение на выходе ком.мутатора 9 равно «О, т. е. двигатель 11 обесточен,.
При изменении кода на выходе блока 1 на выходе сумматора 2 формируется код рассогласования, причем указанный код является прямым и знаковый разряд Р 1 при положительном рассогласовании, и обратным и - при отрицательном. При рассогласовании, большем участка торможения, опреде,тяемом младщими разрядами сум.матора 2, с элемента ИЛИ 4 на вход преобразователя 3 код-код поступает «1, которой включается ключ 18, что приводит к мгновенно.му изменению тока на выходе ЦАП (на входе ОУ 20). Поскольку мощности уси- . ште.чя 10 и двигателя II - величины конечные, то скорость нарастания управляющего напряжения, как правило, ограничивается, что в данном случае осуществляется ограничителем 8 ускорения.
Работает блок 9 ограничения ускорения следующим образом.
Ток через входной конденсатор, который пропорционален первой производной выходного напряжения преобразователя 6 код-напряжение , усиливается ОУ 15 и 16 и в качестве сигнала отрицательной обратной связи подается на инвертирующий вход ОУ 20. Этим обеспечивается линейность изменения напряжения унравления двигателем 1 I и соответственно постоянство ускорений на участках разгона и торможения.
(Наксимальная скорость вращения вала двигателя устанавливается ограничением i-ia- пряжения с выхода преобразователя 6 код- напряжение 6 с помощью блока 7 ограничения скорости. Предположим, что источником управляющего напряжения 13 на базе транзистора 14 установлено напряжение минус 5В (при максимально возможном нанряже- нии на выходе преобразователя 6 код-панря- жение, равном минус 10В). Тогда рост напряжения на выходе преобразователя 6 код- папряжение прекратится, как только оно достигает значение 5 В, так как в этом случае получается, что коллектор транзистора 23 подключен к источнику питания м.инус 5В.
Так как код рассогласования на выходе сумматора 2 отличен от ну.ля, то на выходе элемента ИЛИ 5 (на выходе 9| аналогового коммутатора 9) - единица н режим работы коммутатора 9 определяется знаковым разрядом Р. Рассмотрим работу коммутатора 9 в этом случае: поскольку на входе 9| едипица,то транзисторы 27 и 29 закрыты. Ири «1 на входе 9.; () транзисторы 28 и 30 открыты, прямой вход ОУ 45 подключен к обн1ей 1пине и ОУ 45 работает в режи.ме инвертора. Если же то транзисторы 28 и 30 закрыты и ОУ 45 работает в режиме но- вторите;1Я, т. е. в зависимости от Р напряжение на выходе блока 9 имеет положительную отрицательную полярность и но амплитуде равно напряжению па выходе нреобразо- вателя 6 код-напряжение.
При достижении участка торможения на выходе э.пемента ИЛИ 4 устана вливастся «О и на выходе преобразователя 3 код-код устанавливается код, поданный на его вход при 1, или его дополнение при Р О (инверсный при двоичном коде и преобразованный по фор.муле 1 при двоично-десятичном коде 8421;. На выходе преобразователя 6 код-напряжение формируется линейно снадающее напряжение, что приводит к торможению двигателя с постояпны.м ycKOfie ннем. При достижении точки позициониро- вания на выходе еумматора 2 устанавливается нулевой код, а на выходе коммутатора 9 - нулевое панряжение.
Крутизпа напряжения, формируемая ограничителем 8, выбирается несколько б(х:1ь- nje (на 5-7%) необходимой. Поэтому напри- жение на выходе преобразователя 6 код-напряжение достигает значения, задаваемого ЦАП, несколько раныне, чем происходит переключение резисторов 19, что ириводит к появлению в осциллограм.ме выходно10 на- нряжения нреобразователя 6 код-напряже- ние «ступенек. Такая форма выходного на- нряжения, не влияя на качество регули)о- вания, исключает онасность выхода в точку позиционирования со скоростью выше расчетной, т. е. иск/почает перерегулирова- ние.
Целесообразность преобразования .:iono.T- нительного кода в прямой, формирование
одпополярного напряжения в преобразователе код-аналог 6 и обратного преобразования однополярного напряжения в двухпо- лярнсе в аналогово.м ко.м.мутаторе 9 определяется тем, что применение двуполярного нреобразовате. гя код-аналог, нанри.мер с компенсационным токо.м, требующего дополнительных узлов стабилизации нулевого уровня, существенно увеличивает аппаратурные затраты.
П)именение предлагаемого устройства позволяет простыми средствами реализовать оптимальный закон регулирования в по- зинионных с. 1едяпи1х системах.
0 5
0
5 j
0
Формула изобретения
1.Устройство для нрограм.много управления, содержащ,ее блок задания программы, сумматор, соединенный нервы.ми входами с 1П)Гхол,ами блока задания нрограм.мы, преобразователь ко.т-аналог, нервый э;1емент ИЛИ, 11одключенн171Й входами к выходам разрядов сумматора, и носледовательно соединенные усилитель, двигатель и датчик обратной связи, подключенный выходами к вторым входам сумматора, отличающееся тем, что, е целью расщирения функциональ- нглх возможностей за счет обеспечения формирования двуполярного напряжения управления и использования двоичпо-десятич- пых кодов, введены преобразователь код-код, блок ограничения скорости иере.мещения и блок ограничения ускорения разгона и тор- м{)жения, аналоговый ко.ммутатор и второй элемент ИЛИ, входы- которого подключены к выходам еумматора, а выход - к первому входу анало1-ового коммутатора, второй вход которого соединен с выходо.м преобразователя код-аналог и е входом блока ограничения ускорения разгона и торможения, подключенного выходом к первому входу преоб- ()азовате.ля код-аналог, гретий вход аналогового коммутатора соединен с выходом сит- нала переноса сумматора и с первым входом 1реобразоватсля код-код, выход аналогового ком.мутатора подк,:1ючен к входу усилителя, вторые входы преобразователя код-код соеди1- епы с выхода.ми м, 1адп их разрядов сумматора, третий вход преобразователя код-код подклю чен к выходу первого эле- .чепта ИЛИ, а выход - к второму входу пре- образо1зате;1Я код-аналог, третий вход кото- 10ГО соединен с выходом блока ограничения максимальной скорости неремещения.
2.Устройство но п. 1, отличающееся тем, что, с целью упрощения, резистивная .матрица нреобразователя код-аналог вынолнена в виде последовательного делителя нанря- жения, к уз. ювым точка.м которого подк,1ю- чены ключи.
3.Устройство по н. 1, отличающееся тем, что ана.юговый ком.мутатор сос . онт из элемента И-НЕ, двух инверторов, четырех транзисторов, двух диодов, двенадцати резисторов, операционного усилителя и усилителя мощности, причем первым вход элемента И-НЕ, ЯВЛЯЮШ.ИЙСЯ первым входом коммутатора, подключен через первый инвертор к эмиттеру первого транзистора и через первый резистор - к плюсу источника питания, а через второй резистор соединен с эмиттером второго транзистора и через второй инвертор - с выходом элемента И-НЕ, второй вход которого является третьим входом коммутатора, коллектор первого транзистора подключен к аноду первого диода и через третий резистор подключен к минусу источника питания, с которым через четвертый резистор соединен коллектор второго транзистора и через второй диод - база третьего транзистора, которая через пятый резистор подключена к первым выводам шес
того, седьмого и восьмого резисторов, первый вывод шестого резистора является вторым входом коммутатора, второй вывод восьмого резистора соединен с катодом первого диода и с базой четвертого транзистора, эмиттер которого через девятый резистор подключен к эмиттеру третьего транзистора, второму выводу седьмого резистора и неинвертирующему входу операционного усилителя, инвертирующий вход которого соединен с вторым выводом uiecToro резистора и через десятый резистор - выходом усилителя мо- цнocти, который является выходом коммутатора, вход усилителя мощности подключен к выходу операционного усилителя, коллекторы третьего и четвертого транзисторов соединены с общей шиной, к которой через одиннадцатый и двенадцатый резисторы подключены базы первого и второго транзисторов соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматического управления | 1984 |
|
SU1208532A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Устройство для автоматизированного контроля параметров реле | 1985 |
|
SU1265704A1 |
| Устройство для программного регулирования температры | 1986 |
|
SU1374194A1 |
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| КОММУТАТОР ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2103716C1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Цифровая система программного управления | 1987 |
|
SU1411710A1 |
| Цифровая система программного управления | 1987 |
|
SU1460713A1 |
Изобретение относится к автоматическому управлению производственными процессами и может быть применено в цифровых системах автоматического управления позиционированием различных перемещающихся объектов и позволяет расширить функциональные возможности путем обеспечения формирования двуполярного напряжения управления и использования двоично- десятичных кодов. При нахождении фрезы в точке позиционирования сумма прямого кода на выходе блока 1 и дополнительного на выходе датчика 12 равна «О и соответственно нулевые коды на выходах сумматора 2 и преобразователя 3 код-код и «О на выходах элементов 4 ИЛИ и 5 ИЛИ. При этом ключи 18 закрыты, напряжение на выходе операционного усилителя (ОУ) 20 определяется суммарным сопротивлением резисторов 19. При «О на входе 9i коммутатора 9 транзисторы 27 и 29 открыты, а 28 и 30 закрыты, т. е. резистор 36 подключен к общей шине. Поскольку сопротивления резисторов 33-36 равны, то напряжение на выходе коммутатора 9 равно «О, т. е. двигатель 11 обесточен. При изменении кода на выходе блока 1 на выходе сумматора 2 фор- .мируется код рассогласования. При рассогласовании, большем участка торможения, с элемента ИЛИ 4 на вход преобразователя 3 код-код поступает «1, которой включается ключ 18, что приводит к мгновенному изменению тока на выходе ЦАП (на входе ОУ 20). При достижении участка торможения на выходе элемента ИЛИ 4 устанавливается «О и на выходе преобразователя код-код устанавливается код, ноданный на его вход при Р 1, или его дополнение при . На выходе преобразователя 6 код- напряжение формируется линейно спадающее напряжение, что приводит к торможению двигателя с постоянным ускорением. При достижении точки позиционирования на выходе сумматора 2 устанавливается нулевой код, а на выходе коммутатора 9 - нулевое напряжение. 2 з.п. ф-лы, 3 ил. i (Л го ю со со
Фиг. г
№7.J
U
Составитель Ис прав ни ков а
Техред И. ВересКорректор Н. Рошко
Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
