Изобретение относится к автоматическому управлению производственными процессами и может быть применено в цифровых системах автоматического управления позиционированием различных перемещающихся объектов.
Цель изобретения - повьшение быстродействия.
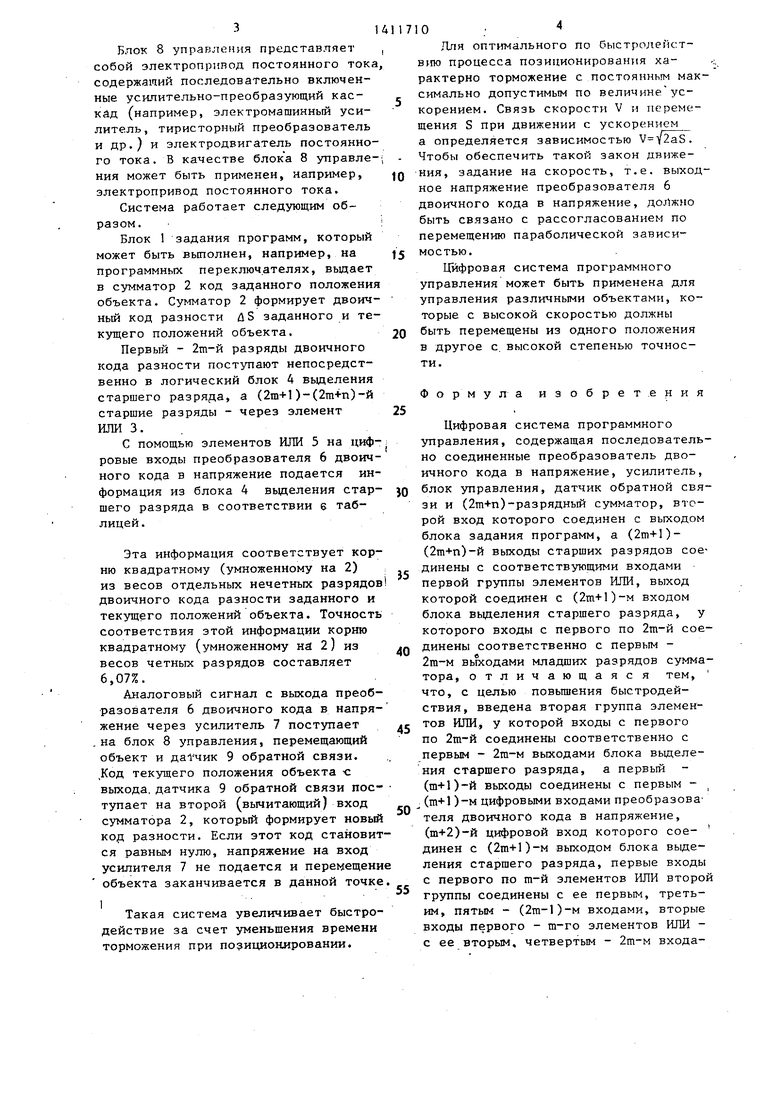
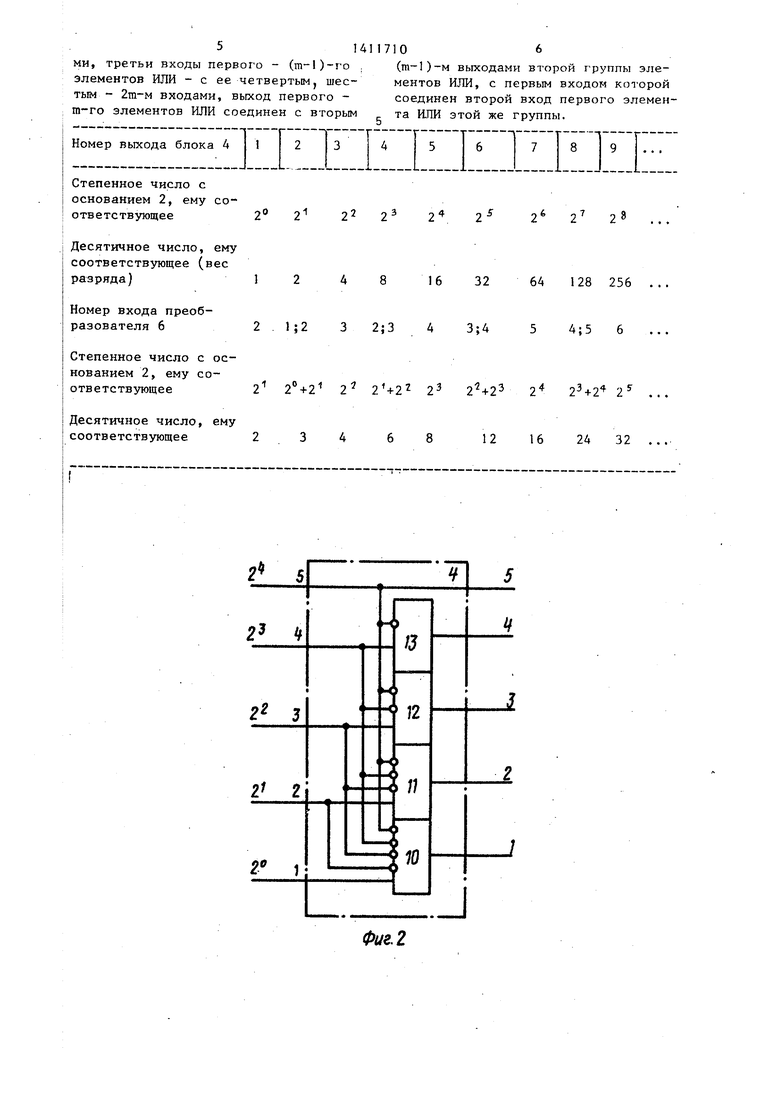
На фиг.1 представлена блок-схема цифровой системы программного управления; на фиг.2 - функциональная схема логического блока вьзделения старшего разряда, содержащего пять входов и пять выходов; на фиг.З - зависимость амплитуды аналогового Сигнала А на выходе преобразователя двоичного кода в напряжение от ко- да разности и S заданного и текущего положений объекта.
Система .содержит блок 1 задания программ, сумматор 2 на 2m+n разрядов, первый элемент ИЛИ 3, логический блок 4 вьщеления старшего-разряда, первый - т-й элементы ИЛИ 5, преобразователь 6 двоичного кода в напряжение на т+2 разрядов, усилитель 7, блок 8 управления и датчик 9 обратной связи.
Логический блок 4 выделения старшего разряда содержит первый - 2т-й (фиг.2, первьй 10 - четвертый 13) элементы И.
Выход преобразователя 6 двоичного кода в напряжение соединен с входом усилителя 7, выходом соединенного с входом блока 8 управления, с которым связан датчик 9 обратной связи. Выхо датчика 9 обратной связи соединен с первым входом сумматора 2. Второй вход сумматора 2 соединен с выходом блока 1 задания программ Выходу- (2т+1)-() старших разрядов сумматора 2 подключены к входам первого элемента ИЛИ 3. Выходы первого - т-го элементов ИЛИ 5 соединены соответственно с вторым - (т+1)-м цифровыми входами преобразователя двоичного кода в напряжение 6.
Первые входы.первого - т-го элементов ИЛИ 5 соединены соответствен- .но с первым - (2т-1)-м выходами логического блока 4 выделения старшего разряда, вторые входы второго - т-го элементов ИЛИ 5 соединены соответственно с вторым - 2т-м выходами логн- ческого блока 4 вьщеления старшего разряда, третьи входы второго - (ra-l)-ro элементов ИЛИ 5 соединены ,
0
5
0
5
0
5
0
5
0
5
соответственно с четвертым - 2т-м выходами логического блока 4 вьзделения старшего -разряда, первый цифровой код преобразователя 6 двоичного кода в напряжение соединен с вторым выходом логического блока 4 вьщеления старшего разряда, (га+2)-й цифровой вход преобразователя 6 двоичного кода в напряжение соединен с ()-м - (самым старшим) выходом логического блока 4 вьщеления старшего разряда, (2т+1)-й вход которого соединен с выходом первого элемента ШШ 3. Первый - 2т-й входы логического блока 4 вьщеления старшего разряда соединены соответственно с первым - 2т-м выходами сумматора 2.
Логический блок 4 вьщеления старшего разряда может быть вьшолнен,. например, на элементах И (фиг.2). Прямые входы первого 10 - четвертого 13 элементов И соединены соответственно с первым - четвертым входами блока 4 вьщеления старшего разряда.
Первый - четвертый инверсные входы первого элемента И 10 соединены соответственно с вторым - пятым входами блока 4 вьщеления старшего разряда. Первый - третий инверсйые ды второго элемента И 11 соединены соответственно с третьим - пятым входами блока 4 вьщеления старшего разряда.
Первьй и второй инверсные входы третьего элемента И 12 соединены соответственно с четвертым и пятым входами блока 4 вьщеления старшего разряда. Инверсный вход четвертого элемента И 13 соединен с пятым-входом блока 4 вьщеления старшего разряда.
Логический блок 4 вьщеления старшего разряда, содержащий т+1 вход и т+1 выход, примененный в предлагаемой системе, выполнен аналогично описанному (фиг.2), т.е. прямые входы первого -. 2т-го элементов И соединены соответственно с первым - 2т-м входами блока 4, первый - 2т-й инверсные входы первого элемента И соединены соответственно с вторым - (2m+I)-M входами блока 4, первый - (2т-1)-и инверсные входы второго элемента И соединены соответственно с третьим - (2т+1)-м входами блока 4, первый - (2га-2)-й инверсные входы третьего элемента И соединены соответственно с четвертым - ()-м входами блока 4 и т.д.
3
Блок 8 управления представляет собой электропривод постоянного тока содержащий последовательно включенные усилительно-преобразующий кас- кАд (например, электромашинньй усилитель, тиристорный преобразователь и др.) и электродвигатель постоянного тока. В качестве блока 8 управления может быть применен, например, электропривод постоянного тока.
Система работает следующим образом.
Блок 1 задания программ, который может быть выполнен, например, на программных переключателях, выдает в сумматор 2 код заданного положения объекта. Сумматор 2 формирует двоич- ный код разности йВ заданного и текущего положений объекта.
Первый - 2т-й разряды двоичного кода разности поступают непосредственно в логический блок А выделения старшего разряда, а (2т+1)-(2т+п)-й старшие разряды - через элемент ИЛИ 3. .
С помощью элементов ИЛИ 5 на цифровые входы преобразователя 6 двоичного кода в напряжение подается информация из блока 4 выделения стар- шего разряда в соответствии е таблицей.
1 J5
Эта информация соответствует корню квадратному (умноженному на 2) из весов отдельных нечетных разрядов двоичного кода разности заданного и текущего положений объекта. Точность соответствия этой информации корню квадратному (умноженному на 2) из .Q весов четных разрядов составляет 6,07%.
Аналоговый сигнал с выхода преобразователя 6 двоичного кода в напря- жение через усилитель 7 поступает дс на блок 8 управления, перемещающий объект и датчик 9 обратной связи. Код текущего положения объекта с выхода, датчика 9 обратной связи пос- тупает на второй (вычитающий) вход сумматора 2, который формирует новый код разности. Если этот код становится равным нулю, напряжение на вход усилителя 7 не подается и перемещение объекта заканчивается в данной точке.
55
I
Такая система увеличивает быстродействие за счет уменьшения времени торможения при позиционировании.
д
(5 20
25
jg
J5
.Q
дс
55
710 ; 4
Для оптимального по быстродействию процесса позиционирования ха- -: рактерно торможение с постоянным максимально допустимым по величине ускорением. Связь скорости V и перемещения S при движении с ускорением а определяется зависимостью . Чтобы обеспечить такой закон движения, задание на скорость, т.е. выходное напряжение преобразователя 6 двоичного кода в напряжение, должно быть связано с рассогласованием по перемещению параболической зависимостью.
Цифровая система программного управления может быть применена для управления различными объектами, которые с высокой скоростью должны быть перемещены из одного положения в другое с высокой степенью точности.
Формула изобретения
Цифровая система программного управления, содержащая последовательно соединенные преобразователь двоичного кода в напряжение, усилитель, блок управления, датчик обратной связи и ()-разрядный сумматор, второй вход которого соединен с выходом блока задания программ, а (2т+1)- ()-й выходы старших разрядов соединены с соответствующими входами первой группы элементов ИЛИ, выход которой соединен с (2т+1)-м входом блока выделения старшего разряда, у которого входы с первого по 2т-й соединены соответственно с первым - 2т-м выходами младших разрядов сумматора, отличающаяся тем, что, с целью повьшения быстродействия, введена вторая группа элементов ИЛИ, у которой входы с первого по 2т-й соединены соответственно с первым - 2т-м выходами блока вьщеле- ния старшего разряда, а первый (т+1)-й выходы соединены с первым - (т+1 )-м цифровыми входами преобразова теля двоичного кода в напряжение, (т+2)-й цифровой вход которого сое- динен с {2т+1)-м выходом блока выделения старшего разряда, первые входы с первого по т-й элементов ИЛИ второй Группы соединены с ее первым, третьим, пятым - (2т-1)-м входами, вторые входы первого - т-го элементов ИЛИ - с ее вторым, четвертым - 2т-м входа514II7106
ми, третьи входы первого - (m-l)-ro . (т-1)-м выходами второй группы эле- элементов ИЛИ - с ее четвертым, шее- ментов ИЛИ, с первым входом которой тым - 2т-м входами, выход первого - соединен второй вход первого элемент-го элементов ИЛИ соединен с вторым та ИЛИ этой же группы.
D
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для программного управления | 1987 |
|
SU1441352A1 |
| Цифровая система программного управления | 1988 |
|
SU1508192A1 |
| Цифровая система программного управления | 1987 |
|
SU1460713A1 |
| Генератор псевдослучайных последовательностей | 1984 |
|
SU1228236A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Устройство для измерения уровней сигнала изображения | 1987 |
|
SU1520672A1 |
| Аналого-цифровой преобразователь | 1985 |
|
SU1358094A1 |
| Устройство для вычисления квадратного корня | 1983 |
|
SU1141407A1 |
| Устройство для управления электродвигателем переменного тока | 1984 |
|
SU1457141A1 |
Цифровая система программного управления может быть использована на предприятиях металлообрабатьшаю- щей, металлургической, легкой и местной промышленности в системах автоматического управления позиционирова нием различных перемещающихся объектов. Целью изобретения является повышение быстродействия. Цифровая система программного управления содержит блок 1 задания программ, сумматор 2 на 2 m+n разрядов, первый элемент ИЛИ 3, логический блок 4 выделения старшего разряда, трехвходовые второй - т-й и двухвходовый (т+1)-й элементы ШШ 5, преобразователь 6 двоичный код-напряжение на т+2 разряда, усилитель 7, блок 8 управления и датчик 9 обратной связи. Преимущество изобретения состоит в повышении быстродействия путем сокраще - ния времени торможения за счет формирования нелинейной (приближающейся к параболической) гистограммы торможения, 3 ил. 1 табл. S2
2
1
22 2 2 2
16 32
Номер входа преоб- раэователя 6
2 1;2 3 2;3
Степенное число с основанием 2, ему соответствующее 2 2%2 2 2 +2 2 2
I Десятичное число, ему соответствующее 2
2 28
16 32
64 128 256
3;4
4;5 6
24 23 + 2 2
12 16 24 32
Фиг, 2
12
IfЮ
9
8
7
В
5
If
г
0
гц в 16
S2
64
4S
Фиг.д
| УСТРОЙСТВО для ПРОГРАММНОГО РЕГУЛИРОВАНИЯ СКОРОСТИ подвижных ОБЪЕКТОВ | 0 |
|
SU351200A1 |
| Цифровая система программного управления | 1976 |
|
SU624210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
