(St) ЦИФРОВОЕ УСТРОЙСТВО для УПРАВЛЕНИЯ позиционным ПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
I
Изобретение относится к автоматике и вычислительной технике и может быть использовано в различных автоматических системах, в частности в системах управления роботами-манипуляторами.
Известна цифровая следящая система , содержащая последовательно соединенные задающее устройство,цифровой сумматор, регистры управления, преобразователь код-напряжение, корректирующее устройство, усилительнопреобразовательное устройство, исполнительный двигатель, механически связанный через редуктор с кодовым датчиком, выход которого подключен к входу цифрового сумматора, тахогенератор, расположенный на валу исполнительного двигателя, и блок сйнхронизации 1 J.
Недостатком этой системы является невысокая точность.
Наиболее близким к предлагаемому по технической сущности является - - /
устройство для управления позиционным приводом, содержащее задающий блок, коммутатор, функциональный преобразователь, преобразователь код-аналог, реверсивный счетчик и привод,, механически связанный с датчиком перемещения 2.
К недостаткам известного устройства относится, во-первых, то, что
10 дискретность отсчета положения по импульсному датчику ограничивается, разрядностью преобразователя код-аналог, что не позволяет иметь высокую точность позиционирования независимо
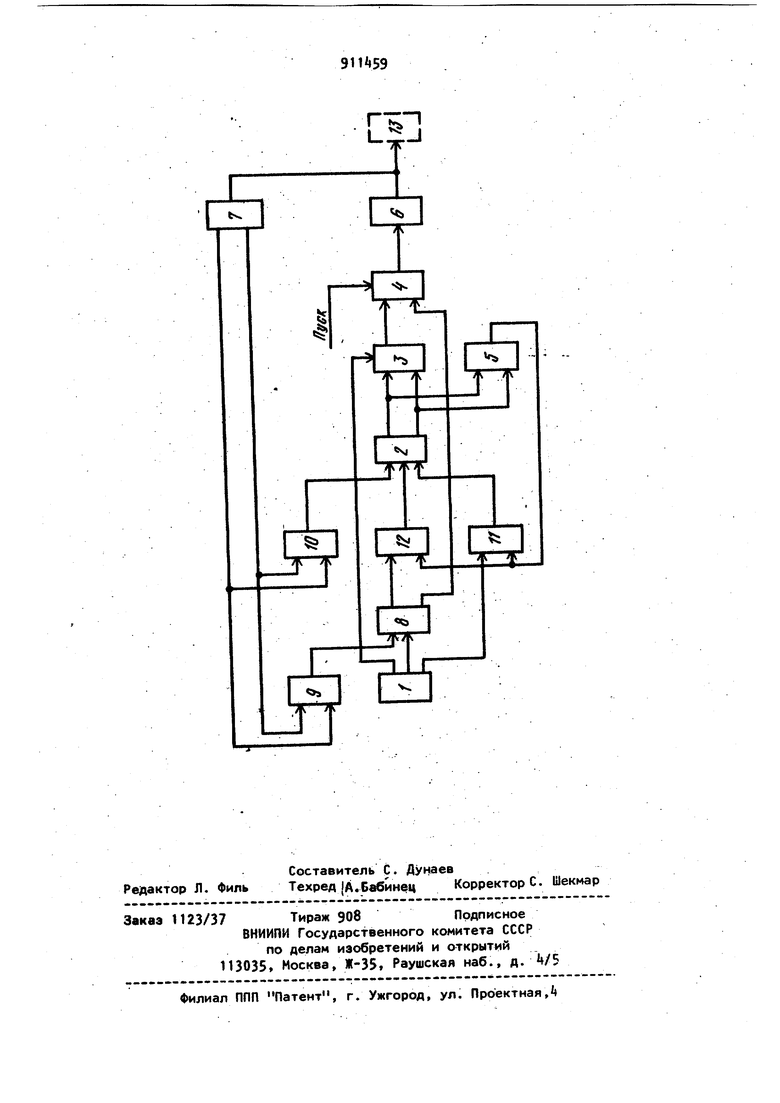
15 от величины полного хода механизма, во-вторых, то, что имеет место неконтролируемый выбег при останове механизма, что приводит к накоплению ошибки отсчета положения при мно20гократных перемещениях без возврата в исходное нулевое положение и, следовательно, к снижению точности и надежности. 3S Цель изобретения - повышение точности и надежности устройства. Поставленная цель Достигается тем, что 8 устройство введены первый и второй компараторы, второй реверсианый счетчик, элемент ИЛИ и блок сравнения, первый и второй входы которого соединены соответственно с первым выходом задающего блока и выходом втооого реверсивного счетчика, а первый и второй выходы - с первым входом первого компаратора и первым входом преобразователя код-аналог, выход которого подключен к входу при вода, а второй вход - к выходу функционального преобразователя, первый и второй входы которого соединены со ответственно с первым и вторым входами лервого реверсивного счетчика и с первым и вторым выходами коммутатора, первым, вторым и третьим входами подключенного соответственно к выходу элемента ИЛИ, выходу первог компаратора и выходу второго компаратора , причем выходы датчика перемощения соединены с соответствующими входами элемента ИЛИ и второго реверсивного счетчика, второй и третий выходы задающего блока подключены соответственно к первому входу второго компаратора и третьему входу функционального преобразователя, а выход первого реверсивного счетчика соединен с вторыми входами первого и второго компарэторов. На чертеже представлена блок-схема цифровогоустройства для управления позиционным приводом. Устройство содержит задающий блок 1, коммутатор 2, функциональный преобразователь 3, преобразователь 4 код-аналог, первый реверсивный счетчик 5, привод 6, датчик 7 перемещения, блок 8 сравнения, второй реверсивный счетчик 9 элемент ИЛИ 10, первый компаратор 11, второй компаратор 12, объект 13 управления. На выходах задающего блока устана ливается координата точки позиционирования объекта 13, величина ускорения привода, путь разгона (торможения) , который при заданной величине ускорения привода определяет величину установившейся скорости перемещения . 8 реверсивном счетчике 9 формируется код фактического положения объекта 13. S блок 8 сравнения определяет величину и знак рассогласования по положению объекта 13 В реверсивном счетчике 5 формируется код перемещения при разгоне и пути, остающемся до точки позиционирования при торможении привода. Компаратор 11 сравнивает заданную величину пути разгона с величиной, поступающей от реверсивного счетчика 5, и определяет точку выхода привЬда на установившуюся скорость перемещения. Если разность величин положительная, то на выходе компаратора 11 логический ноль, если неположительная - логическая единица. Компаратор 12 сравнивает величину рассогласования по положению с величиной, поступающей of реверсивного счетчика 5. и определяет точку начала торможения привода. Если разность величин неотрицательная,то на выходе компаратора 12 логический ноль, если отрицательная - логическая единица. Коммутатор 2 распределяет импульсы , поступающие от датчика 7 перемещения через элемент ИЛИ 10 на первый вход, на два выхода в соответствии с двухразрядным кодом, поступающим на вторсй и третий входы от компараторов 11 и 12, следующим образом (см.таблицу). Здесь 1,характеризующая состояние выхода коммутатора 2, соответствует замкнутому, состоянию первого входа и соответствующего выхода, а О - разомкнутому. Функциональный преобразователь 3 реализует заданную функцию, например, вида ,,j( «-yaxb ,по которой последоват ельности импульсов, поступающие на его первый или второй вхо преобразуются в параллельный код за дания скорости на выходе, причем последовательность импульсов, посту пающая на первый вход, приводит к нарастанию кода на выходе, а последовательность импульсов, поступающа на второй вход - к уменьшению кода а код,поступающий на третий вход от задающего блока 1, определяет коэффициент а, т.е. ускорение (замедление) привода. Преобразователь код-аналог преобразует код, поступающий с функ ционального преобразователя 3, в аналоговый сигнал задания скорости для привода 6 отрицательной или положительной полярности в соответствии с кодом, поступающим на его первый вход от блока 8 сравнения, и имеет также независимый вххэд для включения первой ступени скорости, соответс-твующей младшему разряду. Привод работает следующим образом. . К моменту пуска привода в задающ блоке установлены требуемые величины пути разгона, ускорения и коор дината точки позиционирования. В блоке 8 сравнения определены величина и знак рассогласования по положению. Содержимое реверсивного счетчика 5 равно нулю и с выходов компараторов 11 и 12 на коммутатор 2 поступает код, которому соответствует прохождение импульсов на пер вый выход коммутатора 2. Выходной, сигнал функционального преобразователя 3 такхе равен нулю. По команде Пуск от преобразователя k код-аналог в соответствии с определенным в блоке 8 сравнения знаком рассогласования по положению на вход привода 6 поступает минимальная величина задания скорости, соответствующая младшему разряду преобразователя +. код-аналог, I . Привод начинает перемещение объекта 13- При этом на одном из выход датчика 7 перемещения появляются им пульсы, которые через элемент ИЛИ 1 и коммутатор 2 поступают на первый вход функционального преобразовател 3. На выходе функционального преобразователя 3 в соответствии с завипроисходитсимостью Хвых. нарастание от нулевого значения код задания скорости, а на выходе преоб р.азователя код-аналог увеличивается от нуля .аналоговый сигнал задания скорости. Привод разгойяется с заданным ускорением. Одновременно импульсы с первого выхода коммутатора 2 поступают на суммирующий вход реверсивного счетчика 5 а на вторые входы компараторов 11 и 12 в параллельном коде поступает возрастающая величина перемещения при разгоне. Изменение положения объекта 13 регистрируется в реверсивном счетчике 9 и с первого выхода блока 8 сравнения на второйвход компаратора 12 поступает уменьшающаяся величина рассогласования по положению. Разности сравниваемых величин на выходах компараторов 11 и 12 уменьшаются. Если заданная координата точки позиционирования такова, что рассогласование по положению меньше удвоенного заданного пути разгона привода, то раньше происходит сравнение величин на компараторе 11, при этом на втором и третьем входах коммутатора 2 образуется код, которому соответствует разомкнутое состояние обоих его выходов. Прекращается прохождение импульсов на реверсивный счетчик 5 и функц 1ональньгй преобразователь 3 .в которых фиксируются соответственно путь разгона и установившаяся скорость перемещения. Происходит перемещение объекта 13 с заданной уста-, новившейся скоростью. В некоторой точке положения объек-та 13, когда рассогласование на выходе блока 8 сравнения на величину единицы младшего разряда датчика 7 перемещения меньше величины пути разгона, хранящейся в реверсивном счетчике 5, на входах коммутатора 2 образуется код, которому соответствует разомкнутое состояние первого его выхода и открытое состояние второго выхода. При этом импульсы с датчика 7 перемещения через элементы ИЛИ 10 и коммутатор 2 поступают на второй вход- функционального преобразователя 3. На выходе функционального преобразователя 3 в соответствии с зависимостью X Bbix.VaXg y происходит уменьшение кода задания скорости до нуля. Привод тормозится с заданным замедлением. Одновременно импульсы со второго выхода коммутатора 2 поступают на 19 второй вход реверсивного счетчика 5 а на вторые входы компаратора 11 и 12 поступает уменьшающаяся величина равная остающемуся пути до заданной точки позиционирования плюс величина , соответствующая единице младшего разряда датчика 7 перемещения. Когда объект 13 достигает заданной точки позиционирования, на первом выходе блока 8 сравнения появля ется нулевая величина рассогласования по положению, на выходах реверсивного счетчика 5 и функционального преобразователя 3 единичный код. С приходом следующего импульса от датчика 7 перемещения содержимое реверсивного счетчика 5 и выходной сигнал функционального преобразователя 3 становятся равными нулю, а на выходах блока 8 сравнения устанавливается рассогласование по положению равное единице, и изменяется код зна ка рассогласования. Привод тормозится до нулевой скорости, а на входы коммутатора 2 поступает код, которому соответстует разомкнутое состояние второго его выхода и замкнутое состояние первого выхода, поскольку на входах компараторов 1.1 и 12 разности величин положительные. Таким образом, коммутатор 2 оказывается подготовленным к возможному перебегу привода на величину, большую единицы младшего разряда датчика 7 перемещения. При перебеге импульсы от датчика 7 перемещения через элемент ИЛИ 10 и коммутатор 2 nofcTyпают на первый вход функционального преобразователя 3, на выходе которого начинает нарастать код задания скорости. На выходе преобразователя k код-аналог аналоговый сигнал задания скорости приводу 6 увеличивается от нуля, причем знак сигнала - в соответствии с изменившимся кодом знака рассогласования по положению, поступающего с выхода блока 8 сравнения. Привод интенсивно тормозится и реверсируется. Работа устройства по снижению величины задания скорости при подходе к заданной, точке позицио нирования протекает аналогично вышеописанному. Таким образом, по своим точностным характеристикам предлагаемое устройство значительно превосходит 98 известное и.в случае его применения, Например в роботах-манипуляторах, позволит получить значительный технико-экономический эффект. формула изобретения Цифровое устройство для управления позиционным приводом, содержащее задающий блок, коммутатор ,- функциональный преобразователь, преобразователь код-аналог, первый реверсивный счетчик, привод, механически связанный с датчиком перемещения, о т л ичающееся тем, что, с целью повышения точности и надежности устройства , в него введены первый и второй компараторы, второй-реверсивный счетчик, элемент ИЛИ и блок сравнения, первый и второй входы которого соединены соответственно с первым выходом задающего блока и выходом второго реверсивного счетчика, а первый и второй выходы - с первым входом первого компаратора и первым входом преобразователя код-аналог, выход которого подключен к входу привода, а второй вход - к выходу функционального преобразователя,первый и второй входы которого соединены соответственно с первым и вторым входами первого реверсивного счетчика и с первым и вторым выходами коммутатора, первым, вторым и третьим входами подключенного соответственно к выходу элемента ИЛИ, выходу первого компаратора и выходу второго компаратора , причем выходы датчика перемещения соединены с соответствующими входами элемента ИЛИ и второго реверсивного счетчика, второй и третий выходы задающего блока подключены соответственно к первому входу второго компаратора и третьему входу функционального преобразователя, а выход первого реверсивного счетчика соединен со вторыми входами первого и второго компараторов. Источники информации, принятые во внимание при экспертизе 1.БатовриН А.А. и др. Цифровые системы управления электроприводами. Л., Энергия, 1979, с. 2k. 2.Авторское свидетельство СССР i ,кл. С 05 В 11/06, 1977 (прототип).
f
±J
1 Г
Т
5
