Изобретение относится к станкостроению, именно к устройствам автоматической загрузки технологических машин штучными изделиями, и может быть использовано для загруз кй роторных и роторно-конвейерных машин и ЛИН11Й штучными цилиндрическими изделиями.
Целью изобретения является повышение надежности в работе роторного автомата питания путем сопряжения по прямым линиям конической поверхности захватной воронки с конической поверхностью бункера и внутренним отверстием цилиндрической течки.
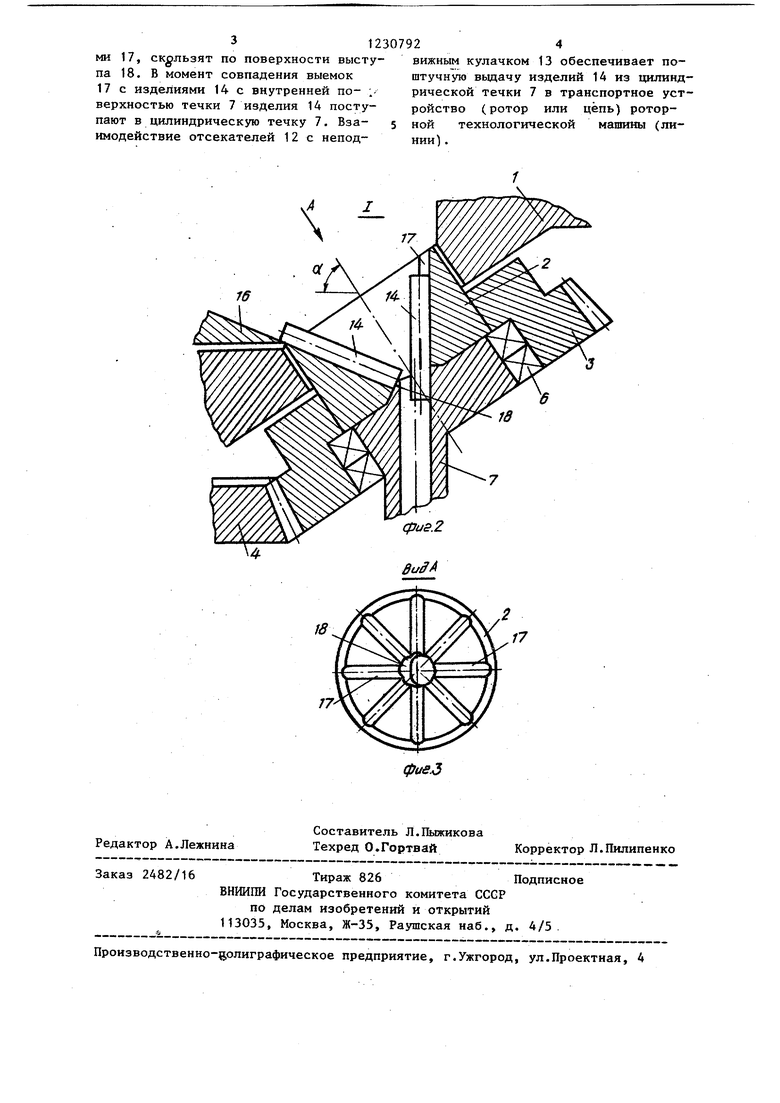
На фиг. 1 изображен роторный автомат питания, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид А на фиг. 2.
Роторный автомат питания содержит бункер 1, по периферии донной части которого равномерно размещены вращаемые вокруг своих осей захватные воронки 2 с конической поверхностью, оси вращения которых наклонены к горизонтальной плоскости под углом oi.. Каждая воронка 2 имеет шестерню 3, находящегося в зацеплении с неподвижным зубчатым венцом А, жестко закрепленным на неподвижной стойке 5. Шестерня 3 установлена на опорах 6 вращения, закрепленных на течке 7. Течки 7 расположены под воронками 2 и неподвижно закреплены в диске 8, жестко связанном с бункером 1 стойками 9. Диск 8 жестко закреплен на стакане 10, установленном с возможностью вращения на неподвижной стойке 5 от закрепленной на нем приводной шестерни 11. Каждая течка 7 имеет.отсекатель 12 с приводом от неподвижного кулачка 13.
Для устранения давления верхних слоев изделий 14 на нижний,расположенный непосредственно в зоне захвата у воронок 2, бункер 1, в котором хранится запас неориентированных изделий, имеет коническую обечайку 15, образующую со стенками бункера 1 предбункер для размещения основной массы изделий, а с поверхностью неподвижного конического дна 16 - кольцевую щель, обеспечивающую возможность поступления изделий 14 к вращающимся воронкам 2. Коническое, дно 16 жестко закреплено на неподвижной стойке 5 и служит для направления изделий к воронкам.
12307922
Для плавной передачи изделий с конического дна 16 в неподвижные течки 7 коническая поверхность каждой захватной воронки 2 установлена - 5 так, что образует общие линии с кр- ническим дном 16 бункера 1 и внутренним отверстием течки 7.
Для повьш1ения эффективности захвата изделий на конусной поверх 0 ности каждой захватной воронки 2 выполнены равномерно расположенные ра- диально направленные выемки 17, глубина которых равна 1/2 диаметра изделий .14. Такая глубина выемок гаран 5 тирует надежное захватывание изделий 14 выемками 17 и транспортирование захваченных ими изделий от наинизшей образующей конуса воронки до наивысшей образующей в результате вра-г
20 щения воронки вокруг своей оси.
35
Часть наружной поверхности течки 7 выступает над внутренней конической поверхностью захватной воронки 25 2, образуя выступ 18, перпендикулярный конусной поверхности захватной воронки 2. Максимальная высота выступа равна 1/2 диаметра изделия 14. Такая высота выступа 18 является оп- 2Q тимальной для удержания на его поверхности изделий, захваченных выемками 17, до момента западания в отверстие течки 7 изделия 14.
Роторный автомат питания работает следующим образом.
В процессе транспортного вращения роторного автомата питания отно- .сительно неподвижной стойки 5, сообщаемого ему от привода питаемой им роторной технологической машины (линии) через шестерню 11, захватные воронки 2, обкатываясь своими шестернями 3 по неподвижному зубчатому венцу 4, вращаются вокруг собственных осей. Изделия 14, находящиеся в предбункере, образованном стенками бункера 1 и обечайкой 15, через кольцевую щель, образованную обечайкой 15 и неподвижным коническим дном 16, поступают по поверхности конического
СП .
дна 1 о к вращающимся захватным воронкам 2 и западают в коническую поверхность захватной воронки 2, поскольку последняя постоянно имеет общую линию с коническим дном 16 бункера 1.
55 Происходит захват изделий 14 выемками 17. В результате вращения захватной воронки 2 вокруг собственной оси изделия 14, захваченные выемка45
Часть наружной поверхности течки 7 выступает над внутренней конической поверхностью захватной воронки 2, образуя выступ 18, перпендикулярный конусной поверхности захватной воронки 2. Максимальная высота выступа равна 1/2 диаметра изделия 14. Такая высота выступа 18 является оп- тимальной для удержания на его поверхности изделий, захваченных выемками 17, до момента западания в отверстие течки 7 изделия 14.
Роторный автомат питания работает следующим образом.
В процессе транспортного вращения роторного автомата питания отно- .сительно неподвижной стойки 5, сообщаемого ему от привода питаемой им роторной технологической машины (линии) через шестерню 11, захватные воронки 2, обкатываясь своими шестернями 3 по неподвижному зубчатому венцу 4, вращаются вокруг собственных осей. Изделия 14, находящиеся в предбункере, образованном стенками бункера 1 и обечайкой 15, через кольцевую щель, образованную обечайкой 15 и неподвижным коническим дном 16, поступают по поверхности конического
.
дна 1 о к вращающимся захватным воронкам 2 и западают в коническую поверхность захватной воронки 2, поскольку последняя постоянно имеет общую линию с коническим дном 16 бункера 1.
Происходит захват изделий 14 выемками 17. В результате вращения захватной воронки 2 вокруг собственной оси изделия 14, захваченные выемка
ми 17, скользят по поверхности выступа 18. В момент совпадения выемок 17 с изделиями 14 с внутренней по- : верхностью течки 7 изделия 14 поступают в цилиндрическую течку 7, Взаимодействие отсекателей 12 с неподвижным кулачком 13 обеспечивает поштучную выдачу изделий 14 из цилиндрической течки 7 в транспортное устройство (ротор или цепь) роторной технологической машины (линии) .
77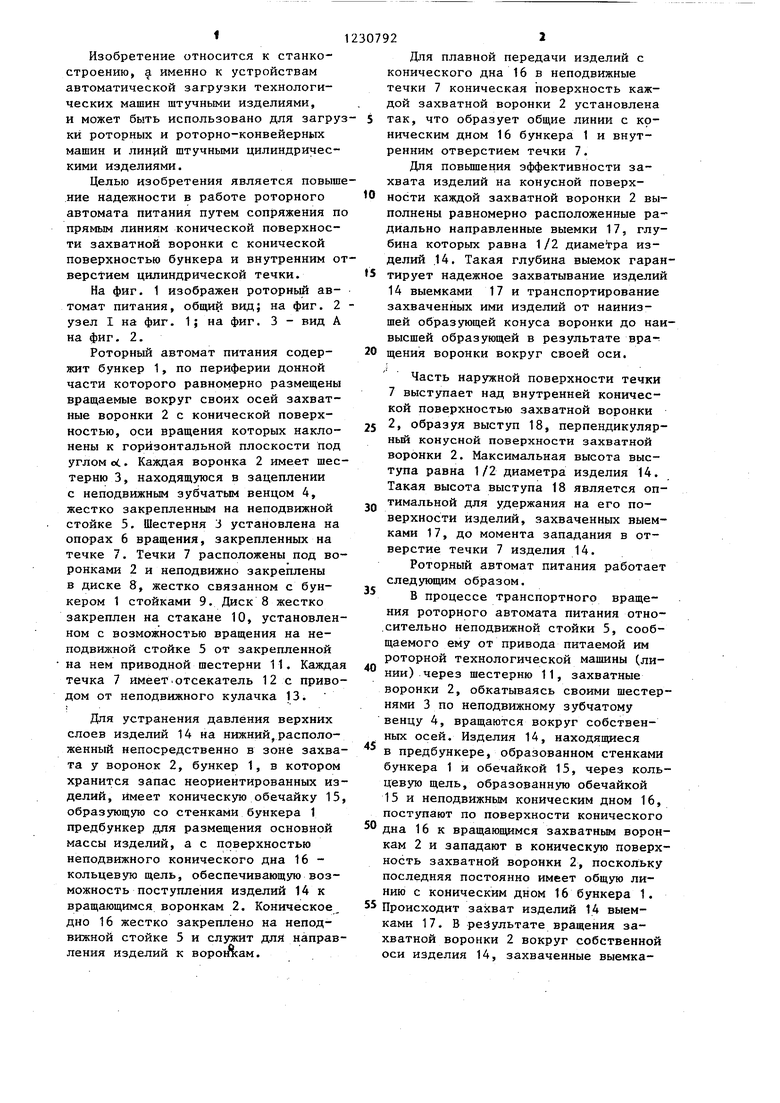
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1754409A1 |
| Роторный автомат питания | 1979 |
|
SU878489A2 |
| Роторный автомат питания | 1977 |
|
SU666039A1 |
| Роторный автомат питания | 1985 |
|
SU1294564A1 |
| Роторный автомат питания | 1981 |
|
SU1013194A2 |
| Загрузочный ротор | 1988 |
|
SU1553314A1 |
| Роторный автомат питания | 1981 |
|
SU994208A1 |
| Вибророторное загрузочное устройство | 1987 |
|
SU1567353A1 |
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Загрузочный ротор | 1989 |
|
SU1602677A1 |

Редактор А.Лежнина
Составитель Л.Пыжикова Техред О.Гортвай
Заказ 2482/16
Тираж 826Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5.
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Л.Пилипенко
| Роторный автомат питания | 1979 |
|
SU878489A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
