Изобретение относится к станкостроению, а именно к устройствам автоматической загрузки технологических машин штучными изделиями, и может быть использовано для загрузки роторных и роторно- коивейерных машин и линий.
Целью изобретения является повышение надежности в работе роторного автомата питания за счет ворошения деталей в предбункере и предотвращения заклинивания деталей между бункером и предбунке- ром, а также за счет контроля наличия деталей в предбункере.
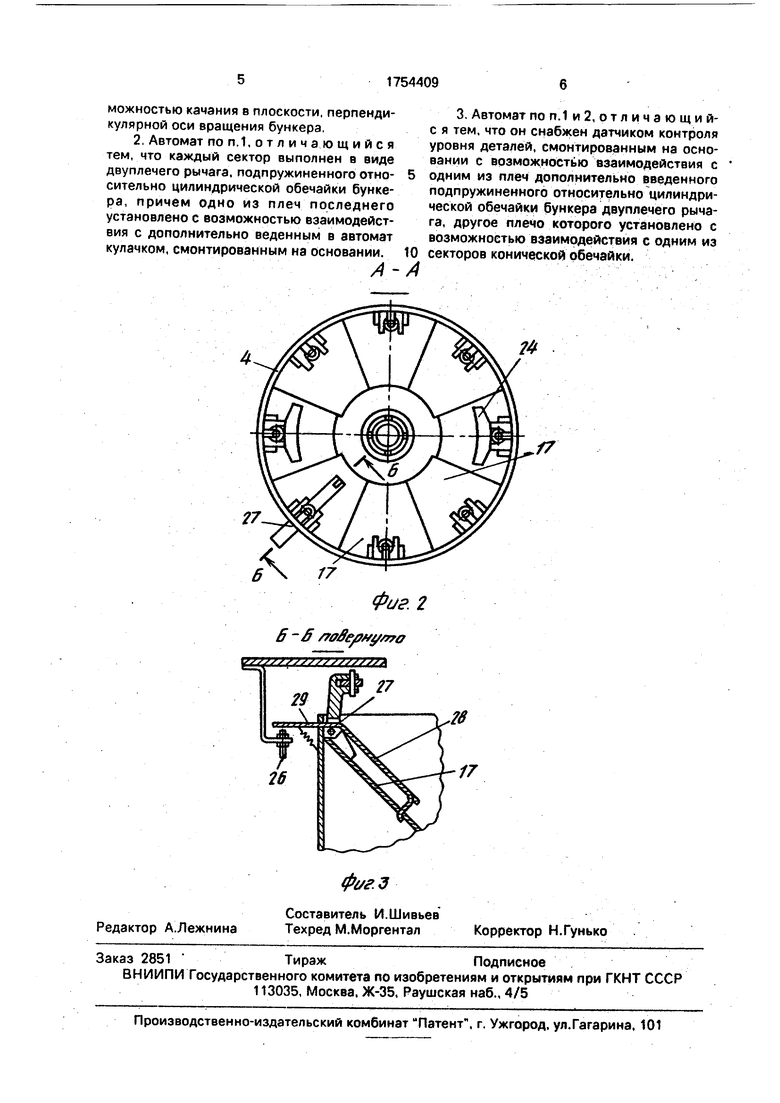
На фиг.1 изображен роторный автомат питания, продольный разрез; нафиг.2-разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1,
Роторный автомат питания содержит установленный на основании 12 с возможностью вращения от шестерни 2 вал 3, на котором смонтирован бункер 4 с коническим дном 5, по периферии которого равномерно расположены захватные воронки 6. Каждая воронка 6 имеет шестерню 7, обкатывающуюся относительно неподвижного зубчатого колеса 8, закрепленного на основании 1. Воронки б с шестернями 7установлены на опорах 9 вращения, закрепленных на диске 10, жестко связанном с бункером 4 валом 3. Под захватными воронками 6 размещены лотки-накопители 11, закрепленные на диске 10.
Каждый лоток-накопитель 11 снабжен механизмом вторичной ориентации (не показан), механизмом 12 отсекания с приводом от неподвижных кулачков 13, закрепленных на основании 1.
Для устранения давления верхних слоев деталей 14 на нижний слой, расположенный непосредственно в зоне захватных воронок б, над бункером 4 смонтирован предбункер 15, образованный коническим дном 5 и конической обечайкой 16, в котором хранится запас неориентированных деталей 14. Коническая обечайка 16 пред- бункера 15 состоит из отдельных радиально расположенных секторов 17, закрепленных на бункере 4 с возможностью качания на осях 18 до упора 19 и подпружиненных пружинами 20.
Каждый сектор 17 выполнен в виде двуплечего рычага 21, одно из плеч 22 которого имеет ролик 23, взаимодействующий с неподвижным кулачком 24, закрепленным на основании 1, а на другом плече 25 закреплен сектор 17, взаимодействующий с массой загруженных в предбункер 15 деталей 14. На основании 1 смонтирован датчик 26 контроля массы деталей 14с возможностью взаимодействия с одним из секторов 17 посредством смонтированного на цилиндрической обечайке подпружиненного двуплечего рычага 27, одно плечо 38 которого взаимодействует1 с одним из секторов 17, а
другое плечо 29 - с датчиком 26.
Роторный автомат питания работает следующим образом.
Детали 14 загружаются навалом в предбункер 15. Приводной механизм (не показан) приводит во вращение посредством шестерни 2 вал 3 и закрепленный на нем бункер 4 с предбункером 15, образованным коническим дном 5 и конической обечайкой 16, состоящей из отдельных
подпружиненных секторов 17. При вращении вала 3 сектора 17 предбункера 15, выполненные в виде двуплечих рычагов, взаимодействуя своими роликами 23 поочередно с неподвижным кулачком 24, ворошат
детали 14 и через кольцевую щель, образованную коническим дном 5 и конической обечайкой 16, перепускают их в зону захватных воронок 6. Размер кольцевой щели устанавливаетсярегулированными
упорами19.
Захватные воронки, обкатываясь своими шестернями 7 относительно неподвижного зубчатого колеса 8, получают вращение, захватывают детали 14 и направляют их в лотки-накопители 11.
Под давлением массы деталей 14, загруженных в предбункер 15, двуплечий рычаг 27, преодолевая сопротивление пружины, опускается. При дальнейшей работе роторного автомата питания по мере опорожнения предбункера 15 от деталей 14 плечо 28 двуплечего рычага 27 освобождается и под действием пружины поднимается, приближая второе плечо 29 к датчику 26,
тем самым давая сигнал на необходимость загрузки деталей 14 в предбункер 15.
Формула изобретения
1. Роторный автомат питания, содержащи и вал, смонтированный на основании с возможностью вращения, закрепленный на нем бункер с коническим дном, по периферии которого равномерно расположены захватные органы, и предбункер,
образованный цилиндрической обечайкой бункера и конической обечайкой, установленной над коническим дном бункера и выполненной в виде усеченного конуса, обращенного вершиной навстречу вершине
конического дна бункера, отличаю щи й- с я тем, что, с целью повышения надежности, коническая обечайка выполнена составной в виде радиально расположенных секторов, каждый из которых установлен на цилиндрической обечайке бункера с возможностью качания в плоскости, перпендикулярной оси вращения бункера,
2, Автомат по п. 1,отличающийся тем, что каждый сектор выполнен в виде двуплечего рычага, подпружиненного относительно цилиндрической обечайки бункера, причем одно из плеч последнего установлено с возможностью взаимодействия с дополнительно веденным в автомат кулачком, смонтированным на основании.
А
3. Автомат по п. 1 и 2, о т л и ч а ю щ и й- с я тем, что он снабжен датчиком контроля уровня деталей, смонтированным на основании с возможностью взаимодействия с одним из плеч дополнительно введенного подпружиненного относительно цилиндрической обечайки бункера двуплечего рычага, другое плечо которого установлено с возможностью взаимодействия с одним из секторов конической обечайки.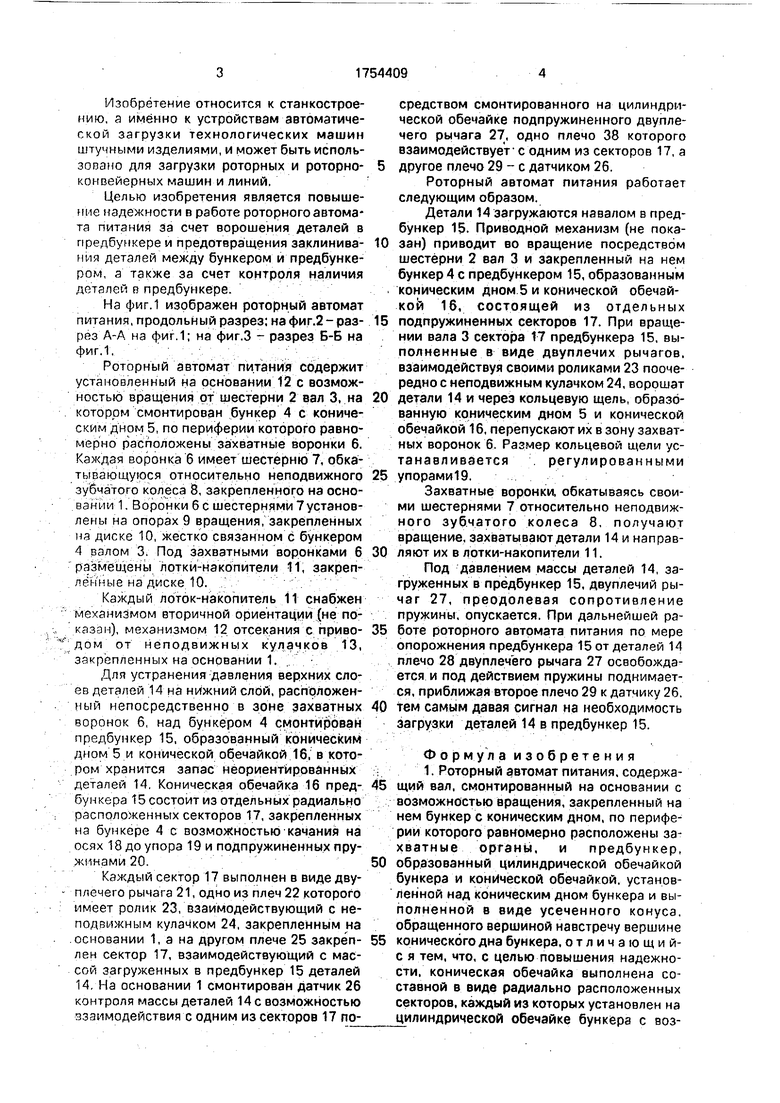
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1984 |
|
SU1230792A1 |
| Роторный автомат питания | 1985 |
|
SU1294564A1 |
| Вибророторное загрузочное устройство | 1987 |
|
SU1567353A1 |
| Загрузочный ротор | 1988 |
|
SU1553314A1 |
| Роторный автомат питания | 1981 |
|
SU1013194A2 |
| Роторный автомат питания | 1979 |
|
SU878489A2 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Роторный автомат питания | 1987 |
|
SU1530407A1 |
| Роторный автомат питания | 1977 |
|
SU666039A1 |
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
Использование: для загрузки роторных и роторно-конвейерных машин и линий. Сущность изобретения: в роторном автомате, содержащем вал 3, смонтированный на основании 1 с возможностью вращения, заг-4 крепленный на нем бункер 4 с коническим дном 5, по периферии которого равномерно расположены захватные органы, и предбун- кер 15, образованный цилиндрической обечайкой бункера и конической обечайкой 16, установленной над коническим дном 5 бункера 4 и выполненной в виде усеченного конуса, обращенного вершиной навстречу вершине конического дна бункера, обечайка 16 дополнительно выполнена составной в виде радиально расположенных секторов, каждый из которых установлен на цилиндрической обечайке бункера с возможностью качания в плоскости, перпендикулярной оси вращения бункера. 2 з.п.ф-лы, 3 ил. /J (Л С sJ ел о фиг 4
Фиг. 2 б Ј /rffffe/wymo
Редактор А.Лежнина
Составитель И.Шивьев Техред М.Моргентал
фиг.З
Корректор Н.Гунько
| Роторный автомат питания | 1984 |
|
SU1230792A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
