ND
СО
ел
Изобретение относится к станкостроению, а более конкретно к устройствам автоматической загрузки технологических машин штучными изделиями типа тел вращения: цилиндр, цилиндрический стакан, цилиндр с конусом и т.п.
Известен роторный автомат питания, содержаш.ий установленный на станине вал, на котором смонтированы корпус бункера с дном и равномерно расположенные по .окружности .рабочие органы с захватами и приводом их перемещения, и приемники изделий 1.
Недостатком этого автомата является то, что при захвате изделий воронкой обеспечивается только первичная их ориентация, кроме того, при подаче изделий типа конусов, возможно заклинивание воронки, что приводит к снижению надежности работы.
Цель изобретения - повышение надежности работы автомата.
Поставленная цель достигается тем, что роторный автомат питания, содержащий установленный на станине вал, на котором смонтированы корпус бункера с дном и равномерно расположенные по окружности рабочие органы с захватами и приводом их перемещения, и приемники изделий, снабжен механизмами вторичной ориентации, выполненными в виде установленных между рабочими органами и приемниками с возможностью возвратно-поступательного перемещения в радиальном направлении подпружиненных ползунов с ориентаторами, при этом каждый рабочий орган выполнен в виде расположенного параллельно валу вертикально-замкнутого элеватора с нечетным числом захватов, кинематически связанного с приводом механизма вторичной ориентации при помощи дополнительного размещенного на станине соосно валу колеса с прерывистыми винтовыми выступами, имеющими горизонтальные и восхо-, дящие наклонные участки.
Причем каждый элеватор снабжен предохранительным, механизмом.
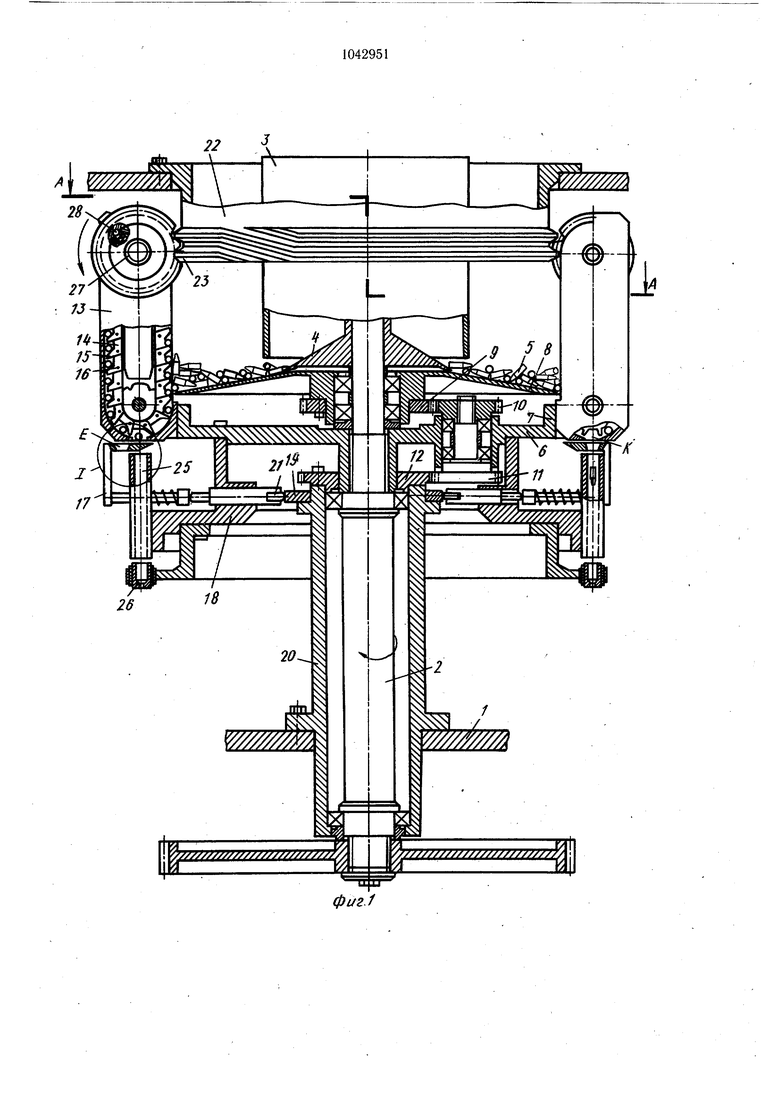
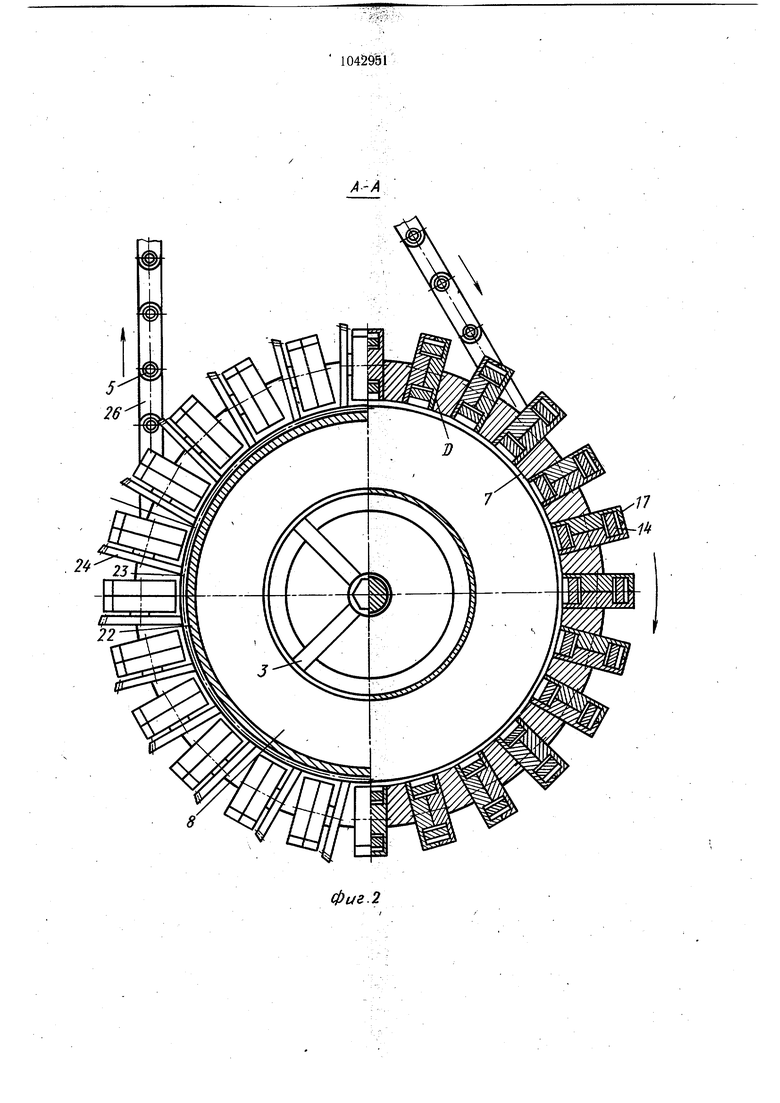
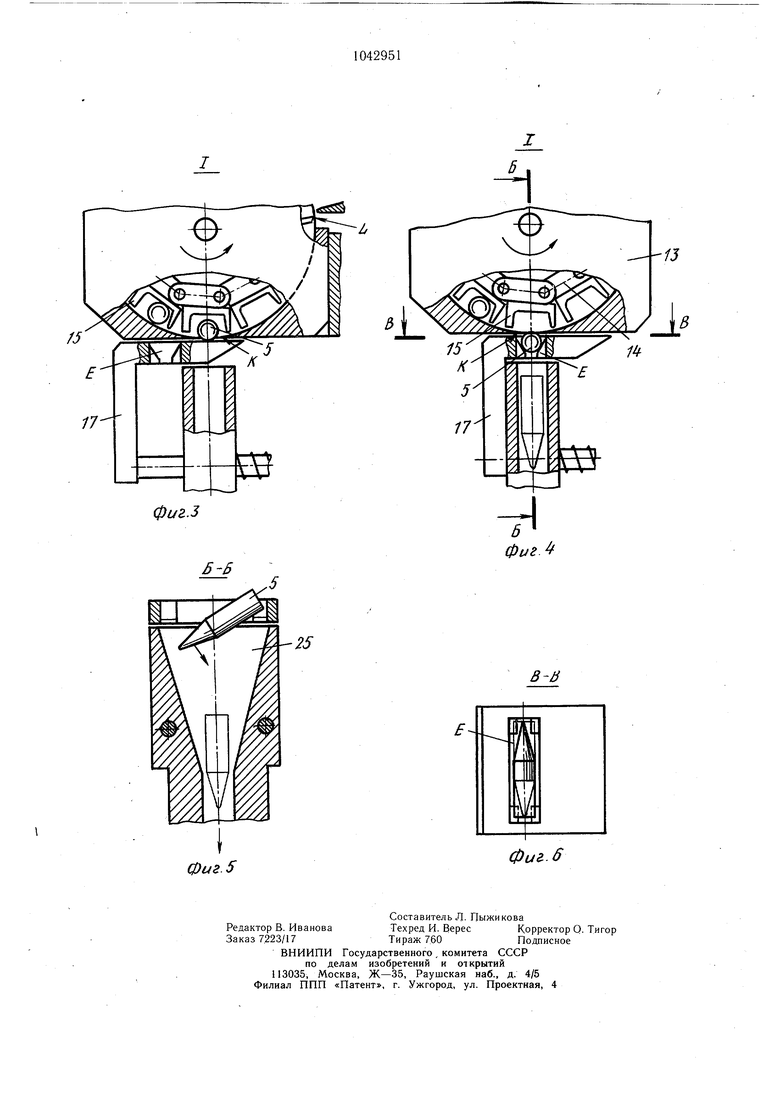
На фиг. 1 изображен роторный автомат питания, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 и 4 - узел I на фиг. 1 (крайнее левое и правое положения ползуна); на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. 6 - разрез В-В на фиг. 4.
Роторный автомат питания содержит станину 1, вал 2, на котором жестко смонтированы предбункер 3 с коническим дном 4 для хранения запаса неориентированнЕлх изделий 5 и корпус бункера 6 с боковой поверхностью 7 и дном 8, выполненным с возможностью поворота относительно вала ротора от блока шестерен 9-12. На боковой поверхности 7 корпуса бункера 6 выполнены пазы D, число которых соответствует числу позиций ротора, в каждый паз параллельно оси ротора установлен и закреплен рабочий орган, выполненный в виде расположенного в кожухе 13 элеватора 14 с захватами 15, закрепленными на бесконечной цепи 16. Каждый захват 15 образует
гнездо на одно изделие, имеет С-образную форму с уклоном нижней полки, по ходу перемещения захватов, в сторону, противоположную плоскости захвата. При этом длина гнезда больше одного изделия, но
меньше двух, а глубина несколько больше наибольшего диаметра изделия, но меньше двух. Под элеватором 14 установлен отсекатель, выполненный в виде подпружиненного ползуна 17, который имеет Г-образную форму, на горизонтальной полке подпружиненного ползуна выполнен профилированный паз Е, обеспечивающий вторичную ориентацию изделия 5, а в кожухе 13 со стороны бункера 6 и подпружиненного ползуна 17 выполнены пазь L и К соответственно для захвата и выдачи изделий. Подпружиненный ползун 17 расположен в корпусе 18, жестко связанным с корпусом бункера б, и имеет возможность совершать возвратно-поступательное перемещение в плоскости, перпендикулярной оси ротора от. кулачка 19, закрепленного на тумбе 20 ротора, по которому обкатывается ролик 21 подпружиненного ползуна 17.
Для накопления изделий элеватором с целью обеспечения гарантированной выдачи, а также для обеспечения совмещения захвата в момент выдачи, с профильным ориентирующим пазом подпружиненного ползуна, привод последнего кинематически, посредством вала ротора, связан с приводом элеватора, выполненным в виде установленного на станине 1,-над корпусом бункера 6, соосно оси вала ротора, колеса 22 с прерывистыми винтовыми выступами 23, образующими горизонтальные и восходящие наклонные, по направлению вращения ротора, участки, и зубчатого колеса 24, установленного на элеваторе 14 с возможностью взаимодействия с выступами неподвижного колеса 22.
Кроме того, выщеописанные функции предложенного устро11ства обеспечиваются за счет нечетного числа захватов 15, закрепленных на бесконечной цепи 16 элеватора 14, совершающих прерывистое поступательное перемещение не менее чем на 2 шага за один оборот ротора. Под подпружиненным ползуном 17 расположена направляющая воронка 25 для передачи ориентированного (носиком вниз) изделия 5 в гнездо транспортной цепи 26.
Для предохранения привода элеватора 14 от перегрузок и поломок, связанных с возможность о заклинивания его изделиями при захвате и выдаче, он снабжен предохранительным механизмом, . например
муфтой предельного момента, установленной на оси 27 элеватора 14 и выполненной в виде установленных в пазах оси 27 и зубчатого колеса 24 подпружиненных шариков 28.
Роторный автомат питания работаем следующим образом.
В процессе транспортного вращения приводного вала 2 относительно станины 1 и колеса 22 предбункер 3 с коническим дном 4. получает вращательное движение, в результате которого насыпанные навалом изделия 5 по наклонному дну 8 корпуса бункера б проникают в кольцевую зону захватов, образованную дном 8 и боковой поверхностью 7. При этом дно 8 имеет возможность совершать вращательное перемещение от блока шестерен 9-12 с относительной скоростью, равной или отличной от скорое ти дна 4 и может быть направленной как в одну, так и в противоположные стороны относительно бункера. Одновременно осуществляется перемещение элеватора 14, захвать которого приводятся в поступательное движение за счет того, что зубчатое колесо 24 взаимодействует с выступами 23, колеса 22, обкатывается по последнему и сообщает захватам элеватора накопителя прерывистое поступательное перемещение не менее чем на 2 шага, за один оборот ротора. Такое перемещение элеватора обеспечивает гарантированное заполнение его захватов изделиями.
При захвате изделий 5, например колпачков, в захватах элеватора происходит их первичная ориентация вдоль оси в горизонтальной плоскости (носиком вперед или назад). Благодаря С-образной форме захватов и уклона нижней полки в момент
захвата в сторону, противоположную плоскости захвата, создаются благоприятные условия для захвата и сохранения первичной ориентации положения изделия. При этом подпружиненный ползун 17 совершает радиальное возвратно-поступательное перемещение, причем за один его ход происходит перемещение захватов 15 элеватора 14 не менее чем на 2 шага, при котором профилированный паз Е ползуна 17 совмещается с пазом К кожуха и с захватом 15, несущим изделие 5. При этом происходит перекладка изделия 5 с захвата через паз К кожуха в профилированный паз Е подпружиненного ползуна 17 (крайнее правое положение ползуна на фиг. 3), из паза Е под действием силы тяжести благодаря специальному профилю последнего (фиг. 6) происходит вторичная ориентация изделия носиком вниз (лля колпачков) фиг. 5 с последующей передачей его через воронку 25 в гнездо транспортной цепи 26. При последующем перемещении подпружиненного ползуна влево происходит -перекрытие паза К в кожухе Горизонтальной полки подпружиненного ползуна, при этом элеватор-накопитель совершает поступательное перемещение не менее чем на 2 шага.
Далее цикл повторяется.
В случае заклинивания элеватора изделиями благодаря предохранительному механизму происходит холостой проворот колеса 24 относительно неподвижного колеса и элеватора. После удаления заклинивающего изделия, работа его возобновляется.
Применение изобретения позволяет повысить надежность работы авто.мата.
фиг.1
фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1982 |
|
SU1077756A2 |
| Роторный автомат питания | 1983 |
|
SU1191255A2 |
| Загрузочный ротор | 1989 |
|
SU1673382A2 |
| Загрузочный ротор | 1990 |
|
SU1745508A1 |
| Роторный автомат питания | 1987 |
|
SU1414555A2 |
| Загрузочный ротор | 1989 |
|
SU1671441A1 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Роторный автомат питания | 1981 |
|
SU1013194A2 |
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Загрузочный ротор | 1988 |
|
SU1553314A1 |
1., РОТОРНЫЙ АВТОМАТ ПИТАНИЯ для поштучной подачи изделий типа тел вращения, содержаш.ий установленный на станине вал, на котором смонтированы бункер и равномерно расположенные по окружности рабочие органы с захватами и приводом их перемещения, и приемники изделий, отличающийся тем, что, с целью повышения надежности работы автомата, он снабжен механизмами вторичной ориентации, выполненными в виде установленных между рабочимиорганами и приемниками, с возможностью возвратно-поступательного перемещения в радиальном направлении подпружиненных ползунов с ориентаторами, при атом каждый рабочий орган выполнен в виде расположенного параллельно валу вертикально-замкнутого элеватора с нечетным числом захватов, кинематически связанного с приводом механизма вторичной ориентации при помощи дополнительного размещенного на станине соосно валу коле-, са с прерывистыми винтовыми выступами, имеющими горизонтальные и восходящие участки. 2. Автомат по п. 1 отличающийся 7ем, что каждый элеватор снабжен предохранительi ным механизмом. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU402452A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
