Изобретение относится к электрооборудованию подвижного состава и предназначено для минимизации потерь электроэнергии в приводе, сокращения расхода энергии на тягу поездов.
Цель изобретения - повышение точности регулирования.
На фиг. 1 представлена функциональная схема устройства для регулирования мощности тяговых двигателей подвижного состава; на фиг. 2 - блок-схема формирова- теля управляющего сигнала регулятора тока якоря.
Устройство содержит регулятор 1 тока якоря и регулятор 2 тока возбуждения, вход которого соединен с выходом формирователя 3, один вход которого соединен с выходом регулятора 1 тока якоря, а другой подключен к датчику 4 тока возбуждения, датчик 5 тока якоря, который подключен к одному из входов блока 6 сравнения другой вход которого соединен с выходом формирователя 7 управляющего сигнала регулятора тока якоря, входы которого подключены к датчику 8 силы тяги и торможения к датчику 9 скорости.
Формирователь управляющего сигнала регулятора тока якоря содержит функцио- нальные преобразователи 10-12, причем выход преобразователя 10 соединен с входом умножителя 13, выход которого подключен к сумматору 14, второй вход которого соединен с выходом функционального преобразователя 11, а выход - с первым входом умножителя 15, выход которого подключен к первому входу сумматора 16, второй вход которого соединен с выходом функционального преобразователя 12, а выход - с входом функционального преобразователя 17, выход которого является выходом формирователя.
Минимизированная функция потерь в силовых цепях для электровозов переменного тока однозначна и имеет вид лРлня а я -f в1 + с
где 1я - ток якоря двигателя.
Функция AP«HH f(F), где F - сила тяги (торможения) имеет тот же вид, но коэффициенты параболы изменяются в зависимости от скорости движения. Зависимость АРмиь {Р), рассчитанная для электровоза ВЛ80Р в режиме рекуперативного торможения, представлена на фиг. 3 и имеет вид лРиин вР+с. Коэффициенты а, в, с, зависят от скорости движения.
Устройство работает следующим образом.
На входы формирователя 7 поступают сигналы с датчика 8 силы тяги и торможения датчика 9 скорости. Выходной сигнал формирователя 7, соответствующий оптимальному току якоря, поступает на вход блока 6 сравнения, где происходит его сравнение с истинным значением тока якоря, с блока 6 сравнения поступает на вход регулятора 1 тока якоря, выходной сигнал которого поступает на вход формирователя 3, на второй вход которого поступает сигнал с датчика 4 тока возбуждения, а выходной сигнал формирователя 3 поступает на вход регулятора 2 тока возбуждения. Таким образом, в устройстве по заданному значению силы тяги либо торможения и текущему значению скорости движения формируются сигналы, соответствующие оптимальным по критерию минимума потерь в силовых цепях электропривода значениям токов якоря и возбуждения двигателей.
Формирователь 6 (см. фиг. 2) работает следующим образом.
Сигнал датчика скорости поступает на входы функциональных преобразователей 10-12, в которых формируются коэффициенты а, в, с уравнения. Выходной сигнал функционального преобразователя 10 поступает на вход умножителя 13, на второй вход которого поступает сигнал датчика 8 силы тяги и торможения. Выходной сигнал умножителя 13 поступает на сумматор 14, где складывается с выходным сигналом функционального преобразователя 11. Выходной сигнал сумматора 14, соответствующий (aF-f-B), далее поступает на вход- умножителя 15, на второй вход которого поступает сигнал датчика 8 силы тяги и торможения. Выходной сигнал умножителя 15 складывается с выходным сигналом функ- ционального преобразователя 12 на сумматоре 16, выходной сигнал которого, соответствующий ДР„ян (aF-|-B)F-|-c, поступает на вход функционального преобразователя 17, в котором по уравнению ДВснн аР + в1д -f с формируется сигнал, соответствующий оптимальному по критерию минимума потерь току якоря.
W -,
W;ri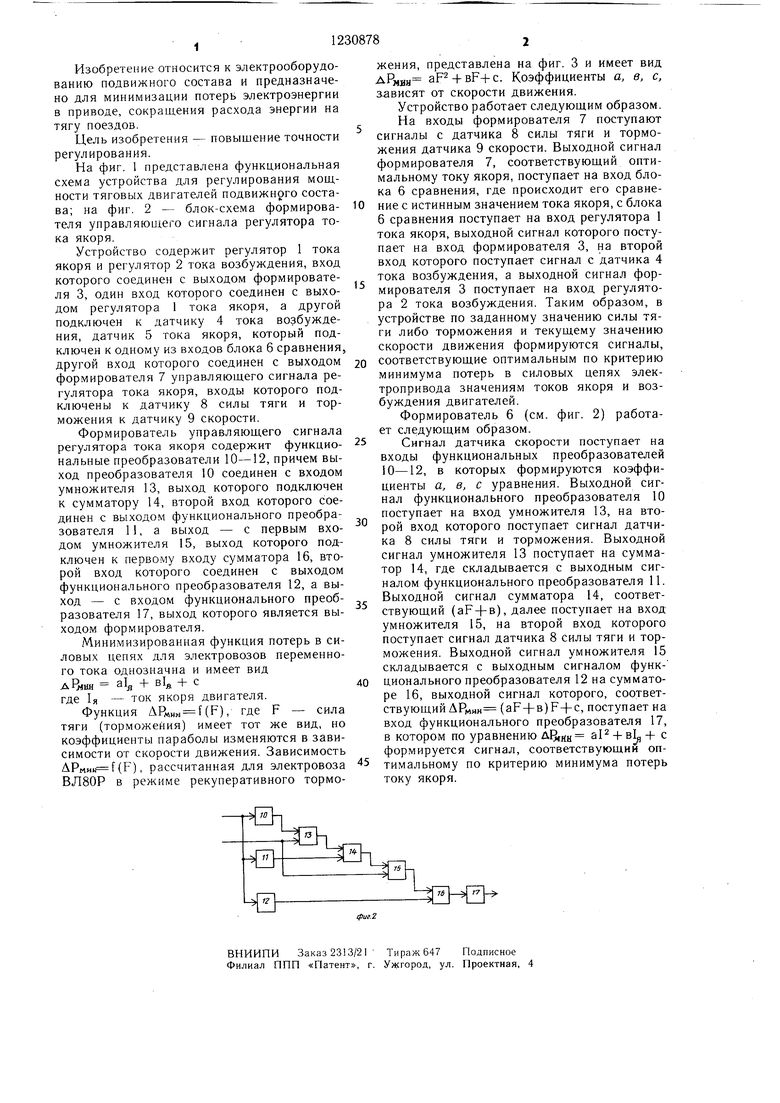
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговыми электродвигателями подвижного состава | 1984 |
|
SU1147610A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМИ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2349466C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1646921A2 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТОКОВ ЯКОРЯ И ВОЗБУЖДЕНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1995 |
|
RU2088432C1 |

| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
