Изобретение относится к пневмоавтоматике и может быть использовано в конструкциях станков и промышленных роботов.
Целью изобретения является повыше- нпе жесткости и улучшение динамических свойств.
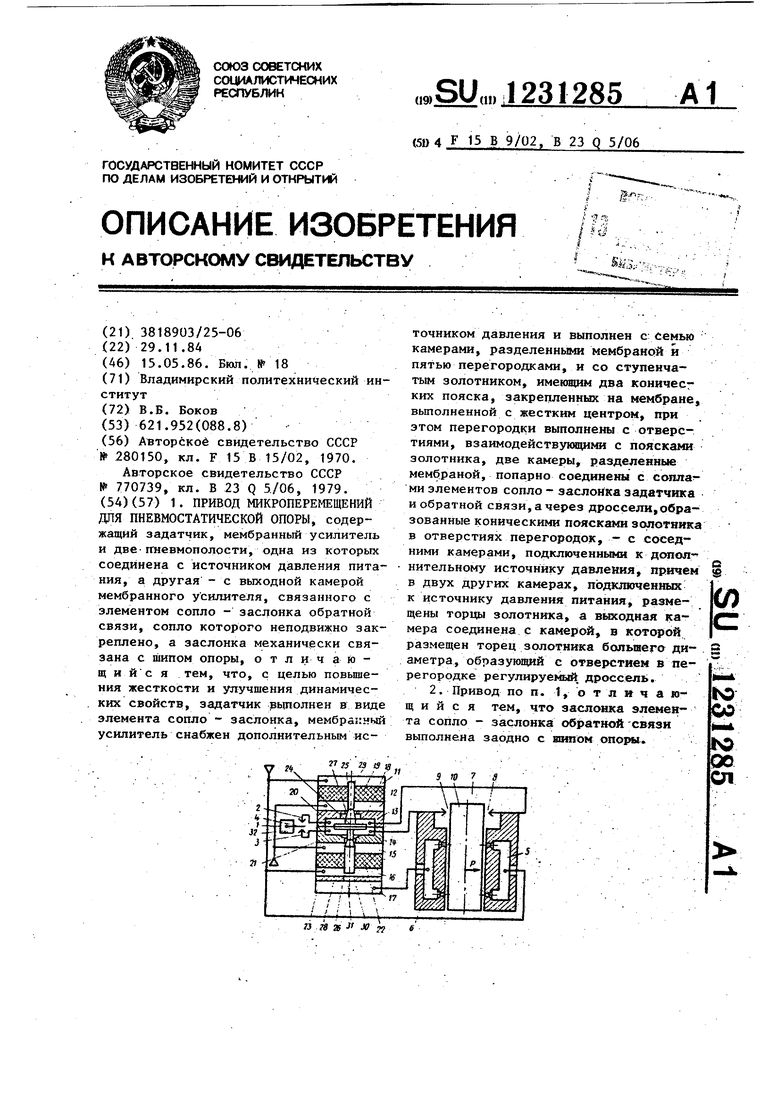
На чертеже изображена схема привода микроперёмещений для пневмостати- ческой опоры.
Привод содержит задатчик, выполненный в виде элемента 1 солло - заслонка с соплами 2, 3 и заслонкой 4, пнев мополрсти 5 и 6, источник давления питания (не показан), соединенный с пневмополостью 5, элемент 7 сопло - заслонка обратной связи с соплами 8, 9 и заслонкой, выполненной заодно с шипом 10 опоры, а также мембранный усилитель, выполненный с камерами 11-
17,разделенными вялой мемб1заной 18
и перегородками 19-23, и со ступенчатым золотником 24, имеющим конические пояски 25 и 26. Перегородки 19-23 выполнены с отверстиями (не обозначены) Камеры 13 и 14 разделены мембраной
18,выполненной с жестким центром, попарно соединены с соплами 2, 8 и 3, 9, а через дроссели 27 и 28, образованные поясками 25 и 26 в отверстиях перегородок 20 и 21, - с соседними камерами 12 и 15, подключенными к дополнительному источнику давления (не изображен). В камерах 11 и 16, подключенных к источнику давления пита- ния, размещены торцы 29 и 30 золотника 24, а выходная камера 17 соединена
с камерой 16, в которой размещен торец 30 большего диаметра, образующий с отверстием в перегородке 23 регули- руемый дроссель 31. Угол конуса пояска 25 вьтолняется меньшим угла конуса пояска 26. Заслонка 4 соединена с электромеханическим преобразователем 32.
Привод микроперемещений для пнев- мостатической опоры работает следующим образом,
Для смещения шипа 10 на необходимую величину, не превышающую :3азора в пневмостатической опоре, на электромеханический преобразователь 32 подается электрический сигнал соответствующей величины и полярности, Заслон- -ка 4, поворачиваясь, изменяет проход- кое сечение установленных перед ее поверхностью сопл 2 и 3, например, уменьшает проходное сечение сопла 2
и увеличивает проходное сечение сопла 3. В результате увеличивается давление в камере 13 и уменьшается в камере 14. Разность давлений в камерах 13 и 14, действуя на мембрану 18, вызывает перемещение золотника 24 с коническими поясками 25 и 26 вниз. Проходное сечение дросселей 27 и 28 при этом увеличивается, что ведет к увеличению давления как в камере 13, так и в камере 14. Однако в результате того что угол конуса пояска 26 больше угла конуса пояска 25, давление в камере 14 нарастает быстрей, чем в камере 13, и в определенном положении золотника 24 их значения приблизительно сравняются.
При движении золотника 24 уменьща- (ется проходное сечение дросселя 31 и давление сжатого воздуха в ненагруженной полости 6. Разность давлений в полостях 5 и 6 опоры вызывает перемещение шипа 10 влево по чертежу. При этом уменьшается проходное сечение сопла 9 и увеличивается проходное сечение сопла 8. Это .приводит к увеличению давления в камере 14 и уменьшению давления в камере 13, чем достигается ускорение процесса уравновешивания давлений в камерах .13 и 14, Перемещение шипа 10 влево продолжается до тех пор, пока сила, возникающая из-за разности давлений в полостях 5 и 6, не уравновесится нагрузкой на шип 10 и упругими силами.
. При движении заслонки 4 вниз в камерах 13 и 14 после достижения равновесия у1:танавливается несколько более
О
низкое давление по сравнению с тем, которое было при размещении заслонки 4 в нейтральном положении. При этом по дросселю 27 камеры 13 осуществляется положительная обратная связь, а по дросселю 28 камеры 14 - отрицательная. Присутствие положительной обратной связи в мембранном усилителе в сочетании с применением вялой мембраны 18 (нулевой жесткости) увеличивает его коэффициент усиления, отрицательная обратная связь обеспечивает устойчивую его работу и высокие динамические свойства, так как в камерах 13 и 14 происходит регулирование давления с незначительным его измене- .нием. .
При этом жесткость привода тем. больше, чем больш.зя разность давлений возникает в полостях 5 и 6 при смеще31231
НИИ шипа 10 под действием нагрузки. Эта разность давлений создается мембранным усилителем, подключенным к полости 6, путем уменьшения проходного сечения дросселя 31. При этом проход- s ное сечение дросселя 31 становится тем меньше, чем больше коэффициент усиления контура,.включающего элемент 7 сопло - заслонка и дроссели 27 и 28. Этот коэффициент определяется как от- О ношение перемещения золотника 24 к изменению измерительного зазора сопла 9. Можно считать, что измерительный зазор сопла 9 не изменяется, а также остаются неизменными зазоры в элемен-Т5 те 1 сопло - заслонка. Пренебрегая весом подвижных деталей привода и жесткостью мембраны 18, на основании равенства расходов газа через дроссели 27 -и 28 камер 13 и 14 в статичес- 20 ких условиях работы .получаем соотношение
SzJ
-Т sih jb)s;h-
.з
s;hJ )s;h -|-
где
Y - текущее положение пояска
12
26,
У sih v
d . - duiT Jl..
. (5):
V .V -r г ... г ow t ,. .V,j начальное положение пояс-35где d, - диаметр торца 29 золотка 26; ника 24,
Е - величина смещения золотни- Из соотношений (1), (2) и (3) пока 24;лучаем зависимость
:
/аi
Sin Sin-|285
текущее положение пояска 25,
-fi/ oi - ;
начальное положение пояс
ка 25; коэффициенты расхода.
диаметры и рабочие зазоры сопл 8 и 9 соответственно;коэффициенты расхода .
дросселей 27 и 28; . диаметр отверстий дросселей 27 и 28; УГЛЫ конусов конических
поясков 26 и 25.
d :d,j и коэффициенты елей 27 и 2S в рабочих мещений золотника 24 и вными 0,8, а также счириложения нагрузки
s. О Т5 20
5
где
огз
в - с
«23 ,3
ИСХОДНЫЙ рабочий зазор
У и У
f 1 01/,
сопла 8; . . - определяются из соотношений
V - EL Ml .
(1) . Sin ifsin p Vs-.n Sin Э
; Ci)
У sih v
d . - duiT Jl..
. (5):
г .. fi .. Й/ iJ 1 h - r ).. /, /1 d -d. j.1-(1 --JT-)- S., - - d 1-( 1-)- S,H - d Jl-(l--j).hy.Hji «
dtli4i-ib),|-i;vU)s4 4 4i:b-;«s,.p
(5)
. .
При работе привода в малом интер- где можно считать, что S,j х , вале изменения измерительного зазора рассматриваею гй коэффициент К мож- 5,, от исходного его значения
но оценить соотношением
Анализируя полученное соотношение, видно, что абсолютная величина коэффициента Кд тем больше, чем больше дигметр отверстия дросселей 27 и 28 .и меньше рабочий зазор сопл 8 и 9, а также диаметр то рца 29 золотника 24. Кроме того, чем меньше углы и/у отличаются друг от друга, тем больше коэффициент К по абсолютной величине
Таким образом, коэффициент усиления привода и его жесткость могут быть значительно увеличены.
Редактор И. Рыбченко
Составитель G. Рождественский
Техред Н.БонкалоКорректоре. Синицкая
Заказ 2552/4tТираж 610
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
d -d.
Hji «
где можно считать, что S рассматриваею гй коэффици
но оценить соотношением
Улучшение динамических свойств привода достигается за счет наличия дополнительной отрицательной обратной связи по дросселю 28 камеры 14, которая обеспечивает ускорение за:тухания переходных процессов в камерах усилителя и привода в целом.
Использование данного изобретения в конструкциях станков и промышленных роботов позволит повысить их жесткость, улучшить динамические свойства и, следовательно, увеличить эффективность их использования.
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель мощности | 1990 |
|
SU1712678A1 |
| Привод микроманипулятора | 1987 |
|
SU1425077A1 |
| Исполнительный механизм судового винта регулируемого шага | 1981 |
|
SU977274A2 |
| Пневмогидравлический усилитель | 1985 |
|
SU1265405A1 |
| СЕРВОКЛАПАН | 1994 |
|
RU2064608C1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1971 |
|
SU308234A1 |
| Электрогидравлический усилитель | 1975 |
|
SU569756A1 |
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| Пневмогидравлический усилитель | 1985 |
|
SU1276858A1 |
| Система управления регулируемой гидромашиной | 1983 |
|
SU1183718A1 |
| ПРИВОД ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ | 0 |
|
SU280150A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Шпиндельный узел | 1979 |
|
SU770739A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
