Изобретение относится к области кузнеч- но-прессового машиностроения, а именно к конструкциям радиально-ковочных машин (РКМ).
Цель изобретения - повышение производительности и точности изготавливаемых изделий, снижение габаритов.
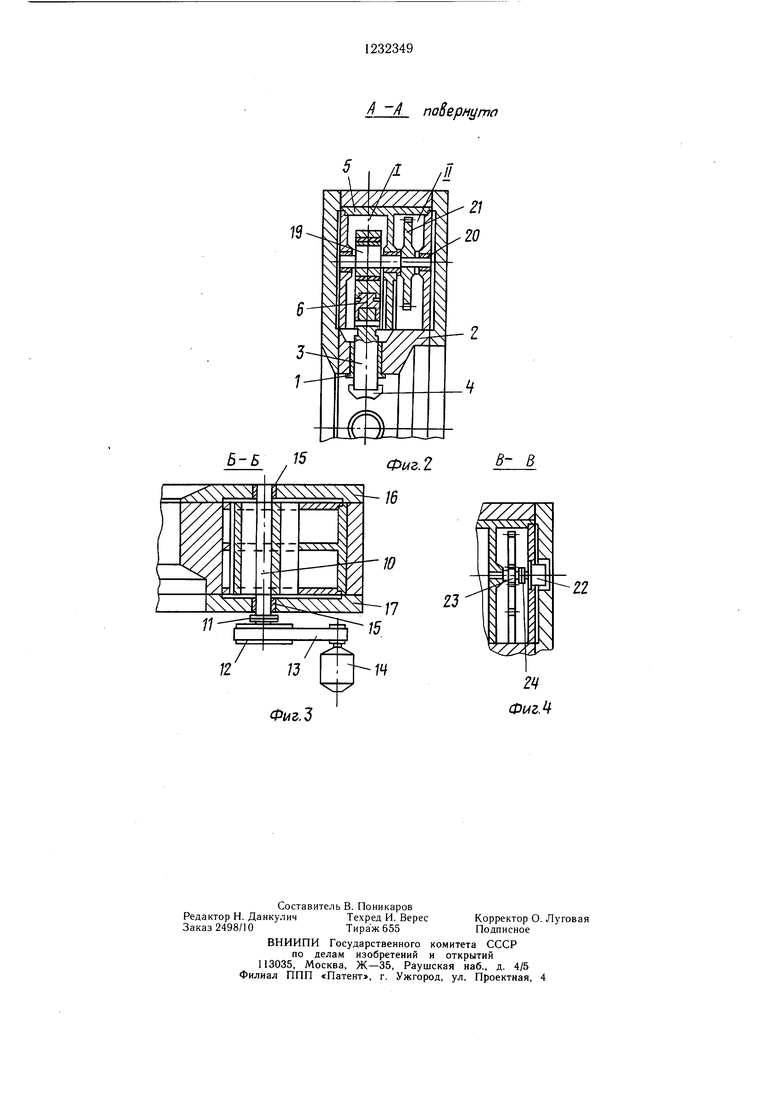
На фиг. 1 изображена РКМ, общий вид в разрезе; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг, 1.
РКМ содержит установленные в направляющих 1 станины 2 ползуны 3 с бойками 4, кинематически связанные с механизмом привода бойков и механизмом регулирования расстояния между бойками через передаточное звено, размещенное в поворотном кор пусе 5, щатуны 6, каждый из которых одним концом шарнирно связан с соответствующим ползуном 3, при этом передаточное звено выполнено в виде установленного в поворотном корпусе 5 с возможностью перемещения кулисного камня 7, а также размещенных в поворотном корпусе 5 в количестве, соответствующем числу бойков 4, с возможностью возвратно-поступательного перемещения относительно поворотного корпуса
5вдоль оси соответствующего ползуна 3 кулис 8, каждая из которых связана со свободным концом соответствующего шатуна
6посредством подвижного соединения в виде, например, выполненных на шатунах 6 выступов, входящих в соответствующие им по конфигурации направляющие пазы, выполненные на кулисах 8.
Кулисы 8 размещены в направляющих 9, закрепленных на поворотном корпусе 5 кон- центрично оси корпуса, механизм привода бойков выполнен в виде связанного с кулисным камнем 7 кривошипного вала 10, который также связан через соединительную муфту 11, маховик-шкив 12, клиноремен- ную передачу 13 с электродвигателем 14, при этом кривошипный вал 10 установI- 15
муфту 24 с зубчатым передаточным механизмом 21.
РКМ работает следующим образом. При включении электродвигателя 14 вращение передается от него кривощипному
валу 10 через клиноременную передачу 13, шкив 12 и муфту 11. При этом кулисный камень 7 сообщает поворотному корпусу 5 качательно-колебательные движения. Вместе с поворотным корпусом 5 качаются
10 и кулисы 8. Во время рабочего хода бойков 4 кулисы 8 неподвижны относительно корпуса 5, но при этом изменяется расстояние от оси ковки до поверхности взаимодействия кулисы 8 с шатуном 6, измеряемое по проходной оси ползуна 3. Указанная поверхность взаимодействия, удаляясь от оси ковки, через шарнирное соединение отводит ползуны 3 от оси ковки. При дальнейщем движении поворотного корпуса 5 поверхность кулисы В приближается к оси ковки и, воздействия через щатун 6 на ползун 3, приближает последний к оси ковки. Таким образом, одному повороту кривощипного вала 10 соответствуют два рабочих хода ползунов 3 и бойками 4.
Для изменения расстояния между бойка25 ми включается электродвигатель 22. Вращение его через соединительную муфту 24, вал- щестерню 23 и зубчатый передаточный механизм 21 передается кривошипным валам 19. Кулисные камни 18 преобразуют вращение кривошипных валов 19 в возвратно- поступательное движение кулис 8, а соответственно - и бойков 4, жестко установленных на ползунах 3, связанных с кулисами 8 через шатуны 6.
По сравнению с известным техническим
,, решением предлагаемая РКМ имеет меньшее число кинематических пар, зазоры в которых приводят к снижению точности выпускаемых изделий и являются источниками шума, поэтому точность изделий, изготавливаемых на известной РКМ, будет ниже. Особенности
20
30
лен в подшипниках скольжения 15, смонти- 40 кинематической схемы предлагаемой РКМ рованных в крышках 16 и 17 станины 2. обусловливают ее большую производительность при большем усилии без увеличения
Механизм регулирования расстояния мощности главного двигателя вследствие луч- между бойками 4 размещен в поворотном щерц распределения сил и более выгод- корпусе 5 и выполнен в виде установленных „ых условий работы основных подшипников в кулисах 8 кулисных камней 18, связан- 45 скольжения кинематической цепи. Размеще- ных с кривошипными валами 19, установленными в подщипниках 20 скольжения, а также зубчатого передаточного механизма 21, синхронизирующего движение бойков 2. Электродвигатель 22 кинематически связан
через вал-щестерню 23 и соединительную
50
ние механизма регулирования расстояния между бойками в поворотном корпусе не только снижает общие габариты РКМ, но и делает мащину более эстетичной, а отсутствие выступающих частей повышает безопасность труда.
15
муфту 24 с зубчатым передаточным механизмом 21.
РКМ работает следующим образом. При включении электродвигателя 14 вращение передается от него кривощипному
валу 10 через клиноременную передачу 13, шкив 12 и муфту 11. При этом кулисный камень 7 сообщает поворотному корпусу 5 качательно-колебательные движения. Вместе с поворотным корпусом 5 качаются
10 и кулисы 8. Во время рабочего хода бойков 4 кулисы 8 неподвижны относительно корпуса 5, но при этом изменяется расстояние от оси ковки до поверхности взаимодействия кулисы 8 с шатуном 6, измеряемое по проходной оси ползуна 3. Указанная поверхность взаимодействия, удаляясь от оси ковки, через шарнирное соединение отводит ползуны 3 от оси ковки. При дальнейщем движении поворотного корпуса 5 поверхность кулисы В приближается к оси ковки и, воздействия через щатун 6 на ползун 3, приближает последний к оси ковки. Таким образом, одному повороту кривощипного вала 10 соответствуют два рабочих хода ползунов 3 и бойками 4.
Для изменения расстояния между бойка25 ми включается электродвигатель 22. Вращение его через соединительную муфту 24, вал- щестерню 23 и зубчатый передаточный механизм 21 передается кривошипным валам 19. Кулисные камни 18 преобразуют вращение кривошипных валов 19 в возвратно- поступательное движение кулис 8, а соответственно - и бойков 4, жестко установленных на ползунах 3, связанных с кулисами 8 через шатуны 6.
По сравнению с известным техническим
,, решением предлагаемая РКМ имеет меньшее число кинематических пар, зазоры в которых приводят к снижению точности выпускаемых изделий и являются источниками шума, поэтому точность изделий, изготавливаемых на известной РКМ, будет ниже. Особенности
20
30
40 кинематической схемы предлагаемой РКМ обусловливают ее большую производительность при большем усилии без увеличения
мощности главного двигателя вследствие луч- щерц распределения сил и более выгод- „ых условий работы основных подшипников скольжения кинематической цепи. Размеще-
ние механизма регулирования расстояния между бойками в поворотном корпусе не только снижает общие габариты РКМ, но и делает мащину более эстетичной, а отсутствие выступающих частей повышает безопасность труда.
Л /I noSepHymf}
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиально-ковочная машина | 1991 |
|
SU1796333A1 |
| ПРОТЯЖНАЯ РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 1992 |
|
RU2136429C1 |
| Радиально-ковочная машина | 1978 |
|
SU729915A1 |
| Радиально-ковочная машина | 1987 |
|
SU1412871A1 |
| Радиально-ковочная машина | 1981 |
|
SU1030082A1 |
| Радиально-ковочная машина | 1976 |
|
SU671104A1 |
| Радиально-ковочная машина | 1979 |
|
SU880596A1 |
| Радиально-ковочная машина | 1980 |
|
SU979004A1 |
| Радиально-ковочная машина | 1982 |
|
SU1397141A1 |
| Радиально-ковочная машина | 1981 |
|
SU942318A1 |

1в
Фиг.З
| Радиально-обжимная машина | 1980 |
|
SU889253A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
