1
Изобретение отноеится к текетильной ipo- мышлеиности, а конкретнее к регуляторам натяжения нитей нри их намотке на ткацкий навой, и является усовершенствованием изобретения но авт. ев. Ny 895876.
Цель изобретения - иовьннение точности регулирования путем онтимизании нотреб- ляемой асинхронным электродвигателем мощности.
На чертеже изображена блок-с.хема нред- лагаемого регулятора.
Нити 1 основы нроходят через выпускной кял 2, валик 3 и наматываются на ткацкий навой 4, который через механическую нередачу 5 связан с валом асинхронного двигателя 6, нодключенного к тиристорному преобразователю 7 частоты. Регулятор имеет уиравляемый генератор 8, который через цифровой интегратор 9 связан с нервым входом преобразователя 7 частоты, второй Е5ХОД которого нодключен к выходу задатчика 10 линейной скорости движения нитей. Аналоговый датчик 1 натяжения нитей механи- чееки связан с валиком 3 и электрически - с первым входом управляемого генератора 8, второй вход которого соединен с аналоговым задатчиком 12 натяжения нитей. Выход цреобразователя 7 частоты соединен с датчиком 13 нотребляемой моншости асинхронным электродвигателем, а выход датчика 13 соединен с первым входом сумматора 14, другой вход которого соединен с выходом множите.льного блока 15. Один вход множительного блока 15 соединен с выходом аналогового датчика 11, а другой вход соединен с выходом задатчика 10 линейной скорости. Прямой выход сумматора 14 соединен с нервым входом сумматора 16, а инверсный выход через запоминающий элемент 17 с вторым входом сумматора 16, третий вход которого соединен с выходом множительного блока 18. Входы множительного блока 18 соединены соответственно с выходами задатчика 10 линейной скорости движения нитей и функционального нреобразователя 19, вход которого соединен с выходом блока 20 деления. Один вход блока 20 деления, соответствующий делимому, соединен с вьгходом интегратора 9, а второй вход, соответствующий делителю, связан с аналоговым задатчиком 12 натяжения нитей. Выход сумматора 16 соединен с управляющим входом по напряжению нреобразователя 7 частоты.
Регулятор натяжения работает следую- Н1.ИМ образом.
В процессе регулирования натяжения нитей изменяются выходные параметры преобразователя 7, питающего асинхронный двигатель 6. /1ля получения требуемого напря1
ВНИИПИ Заказ 251 i/ 24Тираж 590 Подписное
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
1232621
5
0
0
5
0
жения L i8 преобразователя 7 вырабатывается сигнал, пропорциональный напряжению LJio задатчика 0, умноженному на корень квадратный из частного от де.чения напряжения IJg интегратора 9 (пропорционально го радиусу навоя) на нанряжение 1,дг задатчика 12 натяжения нитей, т. с.
Ui, K- t/iovTVlT где К коэффициент нропорпиопальпости.
Частное получаем на выходе блока 20, а функциональный преобразователь 19 реализует зависимость, обратную квадратичной, т. е. на выходе блока 19 устанавливается нанряжение, нронорциона. шное корню )ггги)му из входного напряжения Ь 1(,- U(). На выходе множительного б.;1ока 19 нолучаем требуемое напряжение К , которое поступает на вход сумматора 16. Это напряжение пропорционально управляющему папряжению идеализированного асинхронного двигателя. На выходе множительного блока 15 устанавливается нанряжение, пропорциональное нро- изведению напряжения аналогового датчика 11 натяжения и напряжения задатчика 10 линейной скорости движения, т. е. MOHJ,- ности системы наматывания. Это напряжение с обратным знаком поступает на вход сумматора 14, а на другой вход сумматора ностунает напряжение с выхода датчика 13 потребляемой мощности. Разпость этих напряжений с прямого выхода сумматора 14 поступает на вход сумматора 16, а с инверсного выхода сумматора 14 на заноминаю- щий элемент 17 (например, на линию задержки). С выхода запоминающего элемента 17 сигнал через время, определяемое задержкой элемента 17, поступает на вход сумматора 16.
В результате сигналы соответствующих входов сумматора 16 представляют собой разность (так как один сигнал с инверсного выхода сумматора 14) между выходным на- нряжепием сумматора 14 в момент времени / и напряжением в момент времени /-b/.j, где /3 - время задержки элемента 17. Эта разность суммируется с унравляк)Н1ИМ напряжением (7i8 идеализированного асинхронного двигателя и с выхода сумматора 16 поступает на унравляюндий вход по напряжению тиристорного преобразователя 7. Если разность между новым и старым значениями мо1цности увеличивается, то это приводит к изменению сигнала на выходе сумматора 16, который изменяет питающее нанряжение тиристорного преобразователя таким образом, чтобы рабочая точка потребляемой мощности перемещалась к минимуму.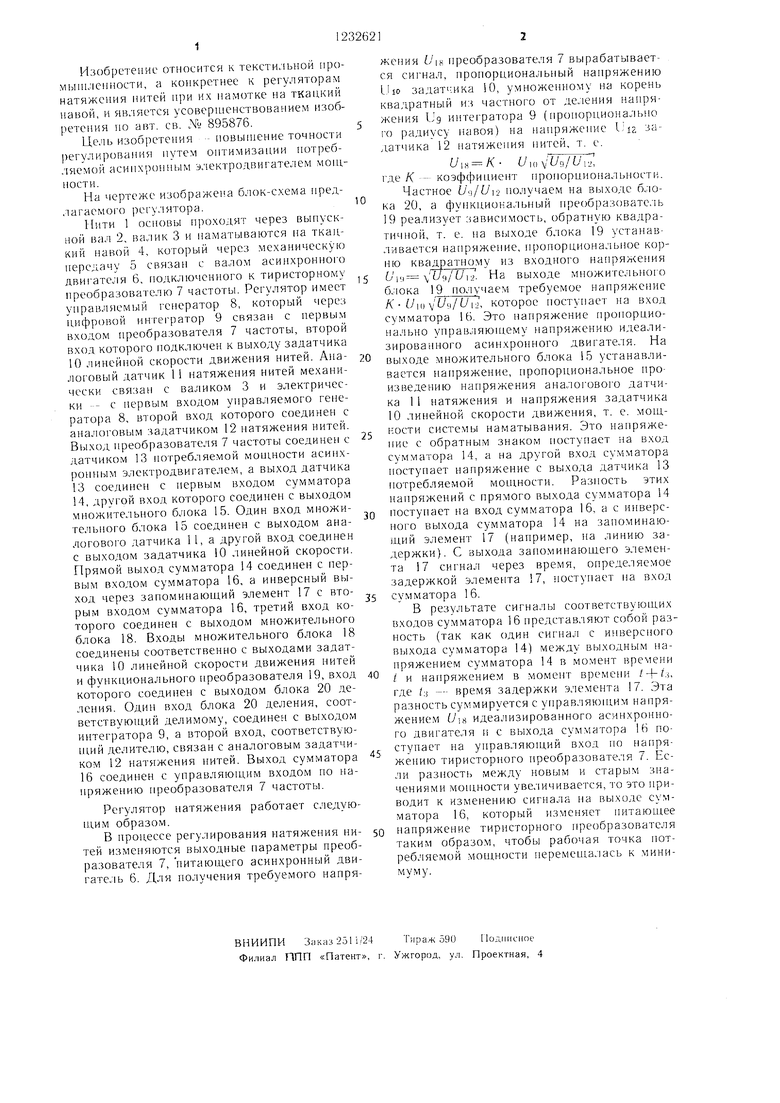
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор натяжения | 1980 |
|
SU895876A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ НАСОСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2165037C2 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для моделирования турбоагрегата | 1976 |
|
SU572812A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРАБОТКИ ОСНОВЫ НА ТКАЦКОМ СТАНКЕ | 1992 |
|
RU2039136C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |

| Регулятор натяжения | 1980 |
|
SU895876A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
