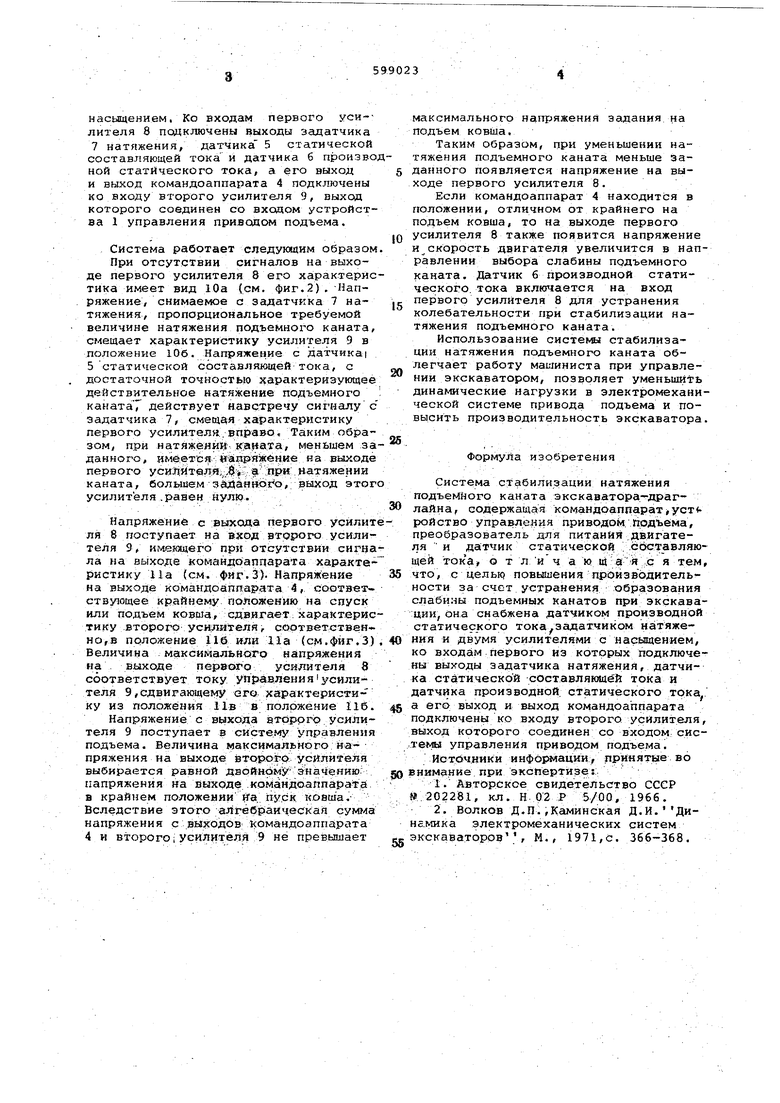
насыщением. Ко входам первого уси-лителя 8 пс«ключены выходы задатчика 7 натяжения, датчика 5 статической составляющей тока и датчика 6 произво ной статического тока, а его выход и выход командоаппарата 4 подключены ко входу второго усилителя 9, выход которого соединен со входом устройства 1 управления приводом подъема. Система работает следующим образом При отсутствии сигналов на выходе первого усилителя 8 его характерис тика имеет вид 10а (см, фиг.2).-Напряжение/снимаемое с задатчкка 7 натяжения, пропорциональное требуемой величине натяжения подъемного каната, смещает характеристику усилителя 9 в .положение 106. Напряжение с датчика 5 статической составляющей тока, с достаточной точностью характеризующее действительное натяжение подъемного канатаТ действует навстречу сигналу с эадатчика 7, смещая характеристику первого усилителя.. вправо, Таким образом, при натяжений каната, меньшем за данного , йме.етс} ; )йг;ащ яжение на выходе первого .мтел..;а.:при:. .натяжении каната, большем зйДйянЙго, выход этог усилителя.равен нулю. Напряжение с ;выхода первого усилит ля 8 поступает на вход аторого усилителя 9/ имеющего при отсутствии сигна ла на выходе командоаппарата характе ристику На (см. фиг.3). Напряжение на выходе командоаппарата 4,, соответству101дее крайнему положеиию на спуск или подъем ковша, сдвигает;характерис тику второго уси,пителя, соответствен но,в положение 116 или На (см.фиг.3) Величина максийальното напряжения на выходе первого усилителя 8 соответствует току упрадаленияiусилителя 9,сдвигающему GFQ характеристику из положения Ив в положение 116. Напряжение с выхода дтрррго усилителя 9 поступает в систему управления подъема. Величина максимального йапряжения на выходе BTo pqippV усилителя выбирается равной дврйномУ значению напряжения на выходе .коМандоалпара а в крайнем положении на, йу.ск ковша.Вследствие этого алгебраич.еская сумма напряжения с .выходов; командоаппарата 4 и второго усилителя .9 не превышает максимального напряжения задания на подъем ковша. Таким образом, при уменьшении натяжения подъемного каната меньше Заданного появляется напряжение на выходе первого усилителя 8. Если командоаппарат 4 находится в положении, отличном от крайнего на подъем ковша, то на выходе первого усилителя 8 также появится напряжение и скорость двигателя увеличится в направлении выбора слабины подъемного каната. Датчик б производной статического, тока включается на вход первого усилителя 8 для устранения колебательности при стабилизации натяжения подъемного каната. Использование систеки стабилизации натяжения подъемного каната облегчает работу машиниста при управлении экскаватором, позволяет уменьшить дина 1ческие нагрузки в электромеханической системе привода подъема и повысить производительность экскаватора. Формула изобретения Система стабилизации натяжения подъемного каната экскаватора-драглайна, содержащая командоаппарат уст ройство управл.ения приводом, подъема, преобразователь для пит.анйя ..дв.игателя и датчик статической . .составляющей тока о т л и ч а ю цай с я тем, что, с цельк) повышения прЬйзводительности за счет устранения образования слабины подъемных канатов при экскава:ции, она снабжена датчиком производной статического тока задатчиком натяжения и двумя усилителями с наеыщенкем, ко входам первого из котррых подключены выходы задатчика натяжения, датчика статической составляющей тока и датчика производной, статического трка,. а его выход и выход командоаппарата подключены ко входу второго усилителя, выход которого соединен со входом систвмы управления приврдом подъема. Истрчники информации, принятые во нимание при экспертизе : 1. Авторское свидетельство СССР .202281, кл.Н 02 Р 5/00, 1966. 2. Волков Д.П.,Каминская Д.И.ДиНс.мика электромеханических систем экскаваторов , М., 1971,с. 366-368.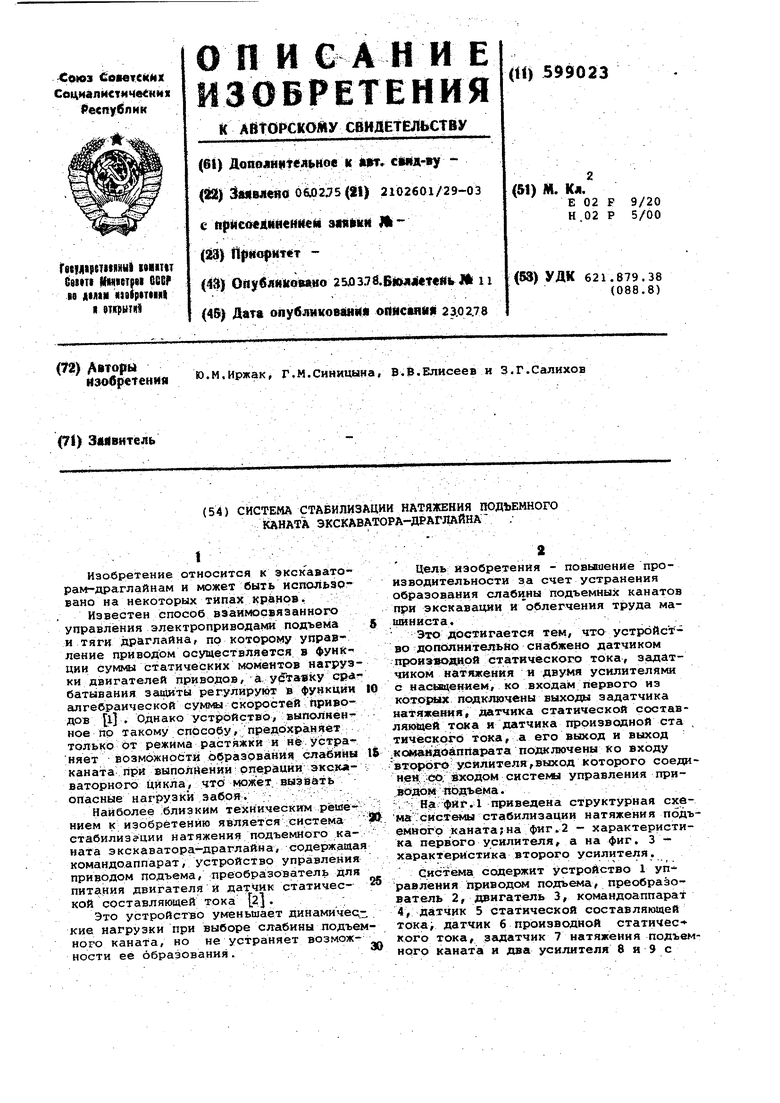

Фиг.1
Ток управления
