Изобретение относится к приводам кг- иающих механизмов экскаваторов-драглайнов и предназначено для управления этими механизмами при регулировании натяжения подъемного каната и в процессе черпания грунта.
Цель изобретения - повышение производительности экскаватора путем устранения возможности нарушения процесса заглубления ковша и образования слабины подъемного каната при любом вращения привода подъема.
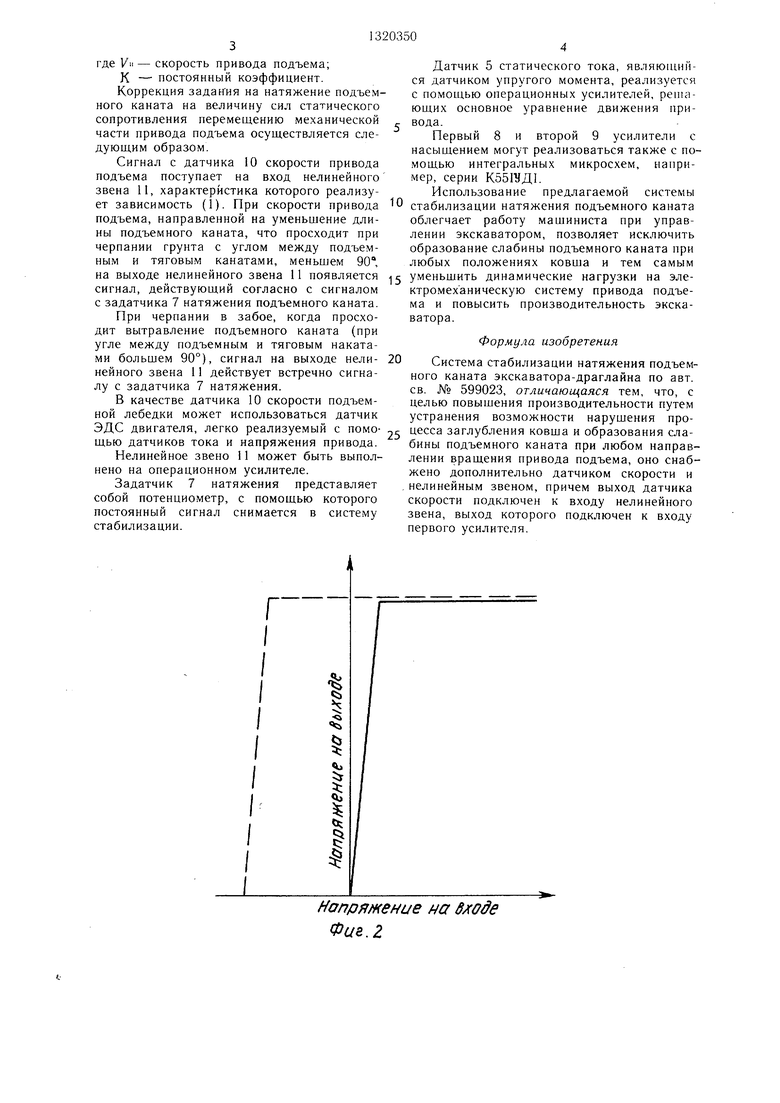
На фиг. 1 изображена функциональная схема системы стабилизации натяжения подъемного каната экскаватора; на фиг. 2 - характеристика первого усилителя; на на фиг. 3 - характеристика второго усилителя.
Система содержит устройство 1 управления приводом подъема, преобразователь 2, двигатель 3, командоаппарат 4, датчик 5
теля 8 для устранения колебательности при стабилизации натяжения подъемного каната. Сигнал с выхода первого усилителя 8, поступаюший на вход второго усилителя 9, действует в сторону увеличения его выходного напряжения. При отсутствии сигналов на входе второго усилителя 9 его характеристика имеет вид 12а (фиг. 3). Напряжение с выхода командоаппарата 4, направленное на спуск ковша, действует в направлении Ю сторону увеличения выходного напряжения второго усилителя 9. Напряжение на выходе командоаппарата 4, соответствующее крайнему положению на спуск или подъем ковша, смещает характеристику второго усилителя 9 соответственно в положение 126 или 12в. Максимальный сигнал с выхода первого усилителя 8 в два раза по модулю превышает максимальный сигнал с выхода командоаппарата 4. Такая полярность и соотношение по величине сигналов, поступающих
15
чивает получение на выходе этого усилителя сигнала, равного
fj Г 7регi/t.K при (Урег 6 кк;
7Опри typer t/KK,
статической составляющей тока, датчик 6 про-20 входы второго усилителя 9, обеспе- изводной статического тока, задатчик 7 натяжения подъемного каната, первый 8 и второй 9 усилители с насыщением, датчик 10 скорости привода подъема и нелинейное звено 11 с характеристикой типа сигнатура.
Устройство управления приводом подъе- ма 1 подключено к преобразователю 2, питающему двигатель 3. Первый вход устройства управления приводом 1 подъема связан с командоаппаратом 4.
Датчик 5 статического тока, датчик 6 производной статического тока и задатчик 7 натяжения подъемного каната подключены к входам первого усилителя 8, выход которого подключен к одному из входов второго 9 усилителя с насыщением, к другому входу которого подключен командоаппарат 4. Датчик 10 скорости привода подъема через нелинейное звено 11 с характеристикой типа сигнатура подключен к входу первого усилителя 8. Выход второго усилителя 9 соединен с входом устройства 1 управления приводом подъема.
30
35
где (Урег - напряжения на выходе первого
усилителя 8;
l/KK напряжение на выходе командоаппарата 4, измеренное от максимального сигнала на спуск ковша. Поэтому суммарный сигнал на входе системы 1 управления равен наибольшему из двух сигналов - с выхода командоаппарата 4 подъема или с выхода первого усилителя 8, являющегося регулятором натяжения подъемного каната.
Таким образом, при уменьшении натяжения подъемного каната меньше заданного появляется напряжение на выходе lep- вого усилителя 8. Если командоаппарат 4 находится в положении, отлично.м от край- 40 него на подъем ковша, то на выходе второго усилителя 9 также появляется напряжение и скорость двигателя 3 увеличивается в направлении выбора слабины подъемного каната. Анализ сил статического сопротивления перемещению подъемного механизма показывает, что величина этих сил составляет до 20-30% от веса упряжи ковша. Система стабилизации должна поддерживать усилие привода подъема, обеспечивающее удержание на весу упряжи ковша. В связи с этим, неучет сил статического сопротивления не может не сказаться на точности стабилизации натяжения подъемного каната.
Система работает следующим образом..
Сигнал с выхода задатчика 7 натяжения действует на вход однополярного усилителя 8, с характеристикой, показанной на фиг. 2, в сторону увеличения его выходного сигнала, а сигнал с выхода датчика 5 статического тока имеет обратную полярность. Поскольку статический ток двигателя 3 однозначно характеризует натяжение подъемного каната на ободе барабана подъемной лебедки, то усилитель 8 выполняет функцию регулятора натяжения подъемного каната. При натяжении каната, меньшем заданного, на выходе первого усилителя 8 имеется напряжение, а при наТаким образом, при уменьшении натяжения подъемного каната меньше заданного появляется напряжение на выходе lep- вого усилителя 8. Если командоаппарат 4 находится в положении, отлично.м от край- 40 него на подъем ковша, то на выходе второго усилителя 9 также появляется напряжение и скорость двигателя 3 увеличивается в направлении выбора слабины подъемного каната. Анализ сил статического сопротивления перемещению подъемного механизма показывает, что величина этих сил составляет до 20-30% от веса упряжи ковша. Система стабилизации должна поддерживать усилие привода подъема, обеспечивающее удержание на весу упряжи ковша. В связи с этим, неучет сил статического сопротивления не может не сказаться на точности стабилизации натяжения подъемного каната.
Силы статическо -о сопротивления пере- мепхению F от привода подъема, как по45
50
тяжении каната, большем заданного, иа вы- 55 казали исследования, связаны со скоростью привода следующим соотношением
ходе этого усилителя напряжение равно нулю. Датчик б производной статического тока подключается на вход первого усиличивает получение на выходе этого усилителя сигнала, равного
fj Г 7регi/t.K при (Урег 6 кк;
7Опри typer t/KK,
входы второго усилителя 9, обеспе-
0
5
где (Урег - напряжения на выходе первого
усилителя 8;
l/KK напряжение на выходе командоаппарата 4, измеренное от максимального сигнала на спуск ковша. Поэтому суммарный сигнал на входе системы 1 управления равен наибольшему из двух сигналов - с выхода командоаппарата 4 подъема или с выхода первого усилителя 8, являющегося регулятором натяжения подъемного каната.
Таким образом, при уменьшении натяжения подъемного каната меньше заданного появляется напряжение на выходе lep- вого усилителя 8. Если командоаппарат 4 находится в положении, отлично.м от край- 0 него на подъем ковша, то на выходе второго усилителя 9 также появляется напряжение и скорость двигателя 3 увеличивается в направлении выбора слабины подъемного каната. Анализ сил статического сопротивления перемещению подъемного механизма показывает, что величина этих сил составляет до 20-30% от веса упряжи ковша. Система стабилизации должна поддерживать усилие привода подъема, обеспечивающее удержание на весу упряжи ковша. В связи с этим, неучет сил статического сопротивления не может не сказаться на точности стабилизации натяжения подъемного каната.
Силы статическо -о сопротивления пере- мепхению F от привода подъема, как по5
0
казали исследования, связаны со скоростью привода следующим соотношением
п Vii,
(1)
где Vii- скорость привода подъема;
К - постоянный коэффициент.
Коррекция задан ия на натяжение подъемного каната на величину сил статического сопротивления перемещению механической части привода подъема осуществляется следующим образом.
Сигнал с датчика 10 скорости привода подъема поступает на вход нелинейного звена 11, характеристика которого реализуДатчик 5 статического тока, являющийся датчиком упругого момента, реализуется с помощью операционных усилителей, penia- ющих основное уравнение движения привода.
Первый 8 и второй 9 усилители с насыщением могут реализоваться также с помощью интегральных микросхем, например, серии К55ШД1.
Использование предлагаемой системы
ет зависимость (1). При скорости привода 0 стабилизации натяжения подъемного каната подъема, направленной на уменьщение дли- облегчает работу машиниста при управ- ны подъемного каната, что просходит при лении экскаватором, позволяет исключить черпании грунта с углом между подъем- образование слабины подъемного каната при ным и тяговым канатами, меньщем 90, любых положениях ковша и тем самым на выходе нелинейного звена 11 появляется 5 уменьшить динамические нагрузки на эле- сигнал, действующий согласно с сигналом ктромеханическую систему привода подъе- с задатчика 7 натяжения подъемного каната. При черпании в забое, когда просхо- дит вытравление подъемного каната (при угле между подъемным и тяговым накатами большем 90°), сигнал на выходе вели- 20 нейного звена 11 действует встречно сигналу с задатчика 7 натяжения.
В качестве датчика 10 скорости подъемной лебедки может использоваться датчик
ма и повысить производительность экскаватора.
Формула изобретения
Система стабилизации натяжения подъемного каната экскаватора-драглайна по авт. св. № 599023, отличающаяся тем, что, с целью повышения производительности путем устранения возможности нарушения проЭДС двигателя, легко реализуемый с помо- цесса заглубления ковша и образования с.аащью датчиков тока и напряжения привода.
Нелинейное звено 11 может быть выполнено на операционном усилителе.
Задатчик 7 натяжения представляет собой потенциометр, с помощью которого постоянный сигнал снимается в систему стабилизации.
бины подъемного каната при любом направлении вращения привода подъема, оно снабжено дополнительно датчиком скорости и нелинейным звеном, причем выход датчика скорости подключен к входу нелинейного звена, выход которого подключен к входу первого усилителя.
Нопрягнение на Фиг. 2
стабилизации натяжения подъемного каната облегчает работу машиниста при управ- лении экскаватором, позволяет исключить образование слабины подъемного каната при любых положениях ковша и тем самым уменьшить динамические нагрузки на эле- ктромеханическую систему привода подъе-
ма и повысить производительность экскаватора.
стабилизации натяжения подъемного каната облегчает работу машиниста при управ- лении экскаватором, позволяет исключить образование слабины подъемного каната при любых положениях ковша и тем самым уменьшить динамические нагрузки на эле- ктромеханическую систему привода подъе-
Формула изобретения
Система стабилизации натяжения подъемного каната экскаватора-драглайна по авт. св. № 599023, отличающаяся тем, что, с целью повышения производительности путем устранения возможности нарушения процесса заглубления ковша и образования с.аацесса заглубления ковша и образования с.аабины подъемного каната при любом направлении вращения привода подъема, оно снабжено дополнительно датчиком скорости и нелинейным звеном, причем выход датчика скорости подключен к входу нелинейного звена, выход которого подключен к входу первого усилителя.
Напоя(ение на входе Фиё.З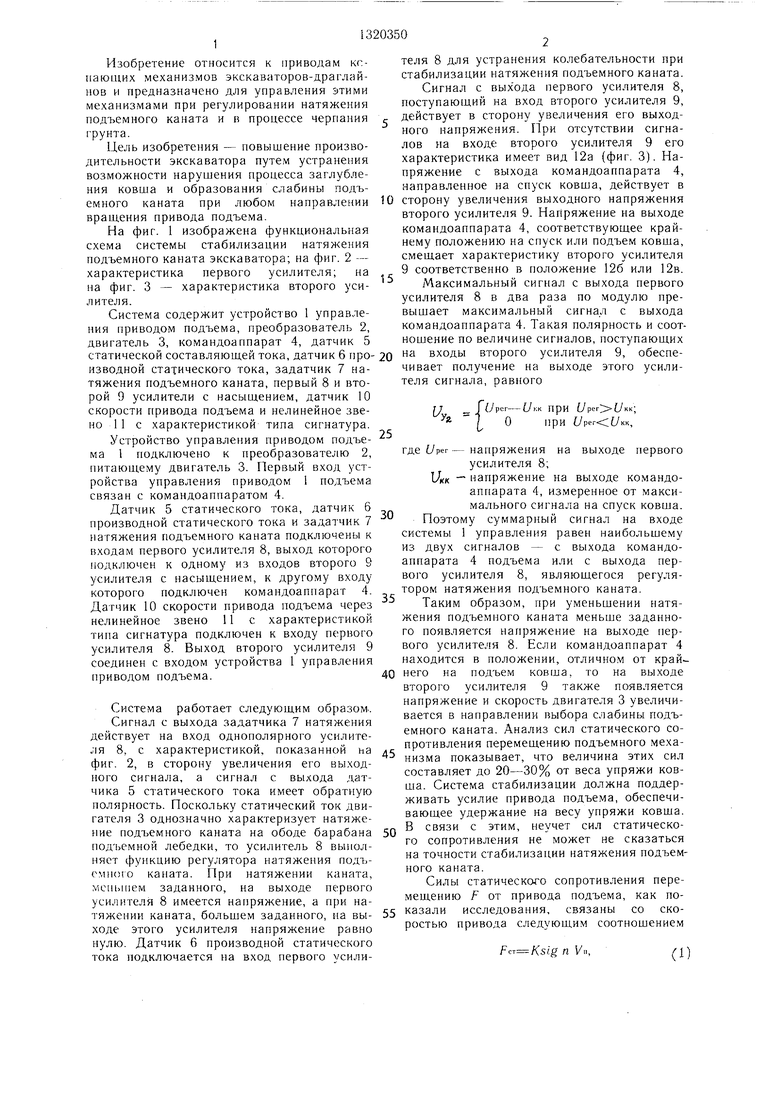
Изобретение относится к ириводам копающих механизмов экскаваторов-драглайнов и позволяет повысить производительность экскаватора путем устранения возможности нарушения процесса заглубления ковша и образования слабины подъемного каната при любом направлении вращения привода подъема (ПП). Система содержит устройство 1 управления ПП, преобразователь 2, двигатель 3, командоаппарат 4, датчик 5 статической составляющей тока, датчик 6 производной статического тока, за- датчик 7 натяжения подъемного каната, два усилителя 8 и 9 с насьпцением, датчик скорости 10 привода подъема и нелинейное звено (НЗ) 11 с характеристикой типа сигнатура. Сигнал с датчика скорости 10 поступает на вход НЗ 11, выходом подключенного к входу усилителя 8. В зависимости от знака скорости ПП сигнал с выхода НЗ 11 корректирует сигнал заданного натяжения на величину, пропорциональную значению сил статического сопротивления перемещению ПП. 3 ил. О СП оо to о со ел о fsj
