Изобретение относится к роботостроению, к захватным устройствам манипуляторов.
Цель изобретения - расширение технологических возможностей путем обес печения захвата детали с различными схемами базирования, возможности перекатывания детали по плоскости по любой траектории и обеспечения возможности центрирования детали типа стержней с пересекающимися осями.
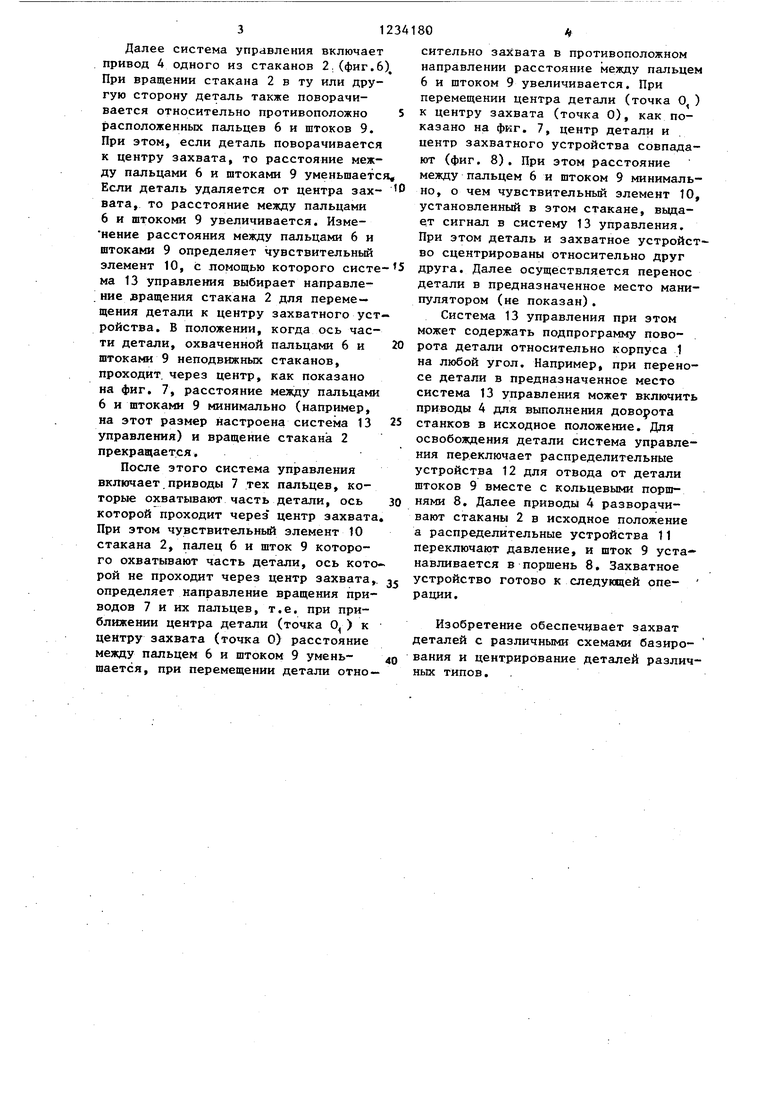
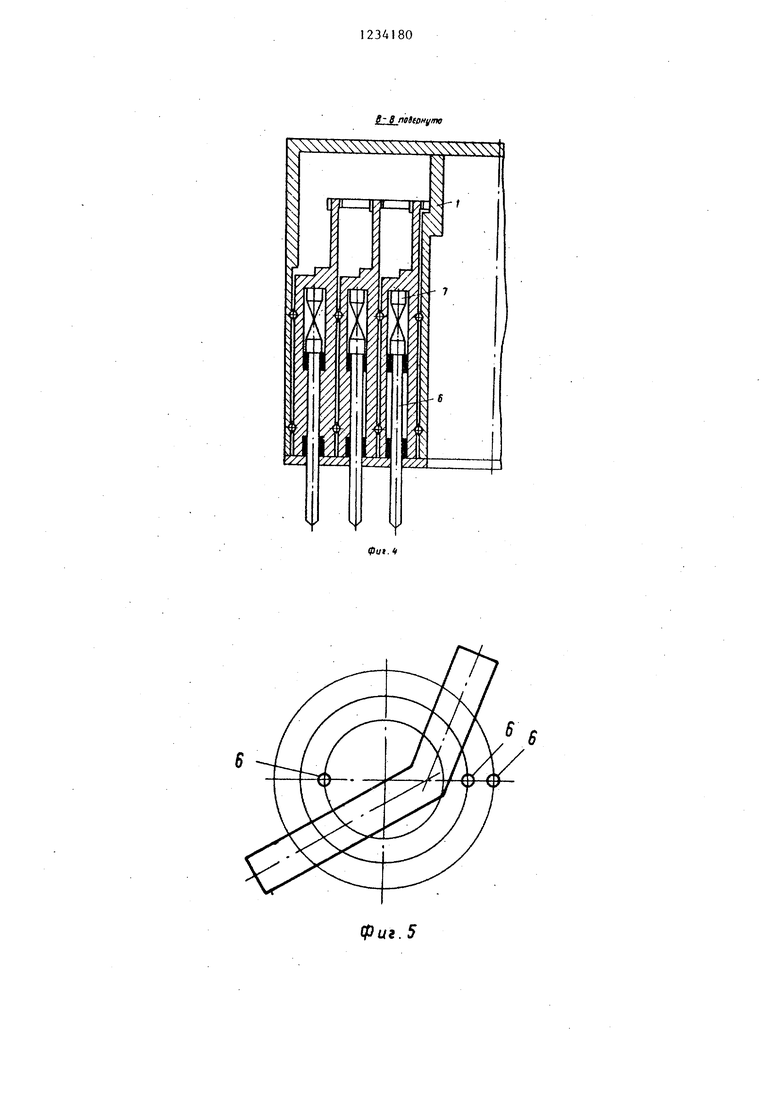
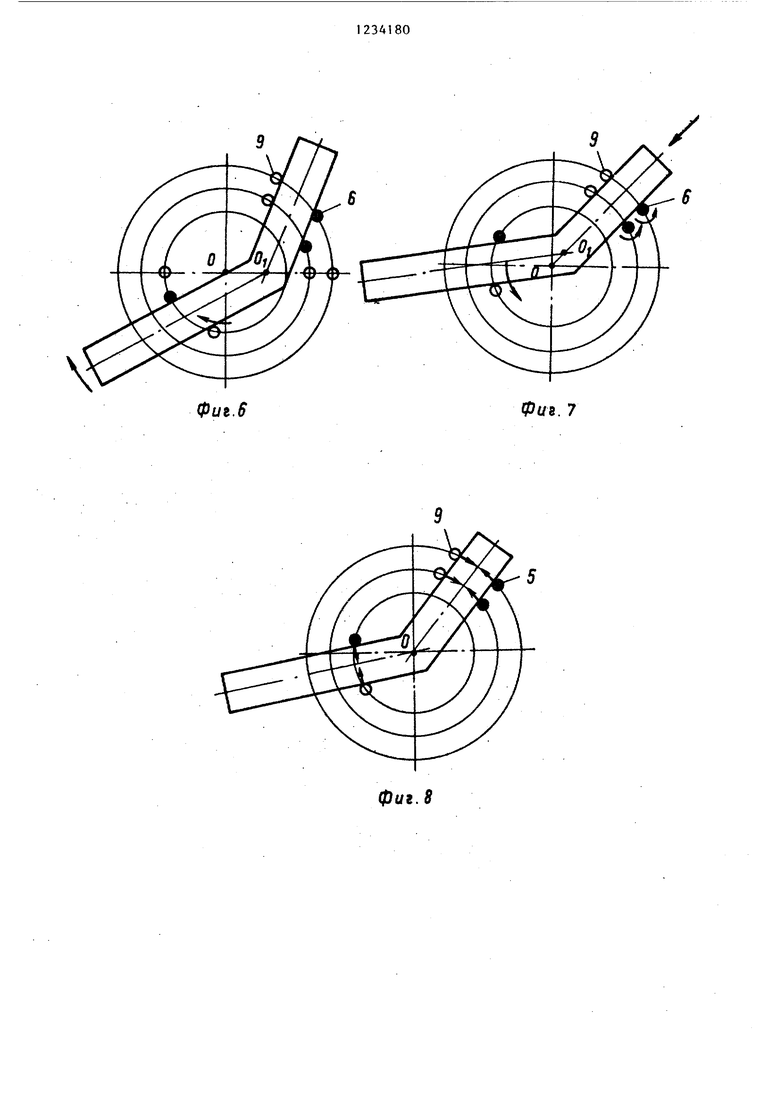
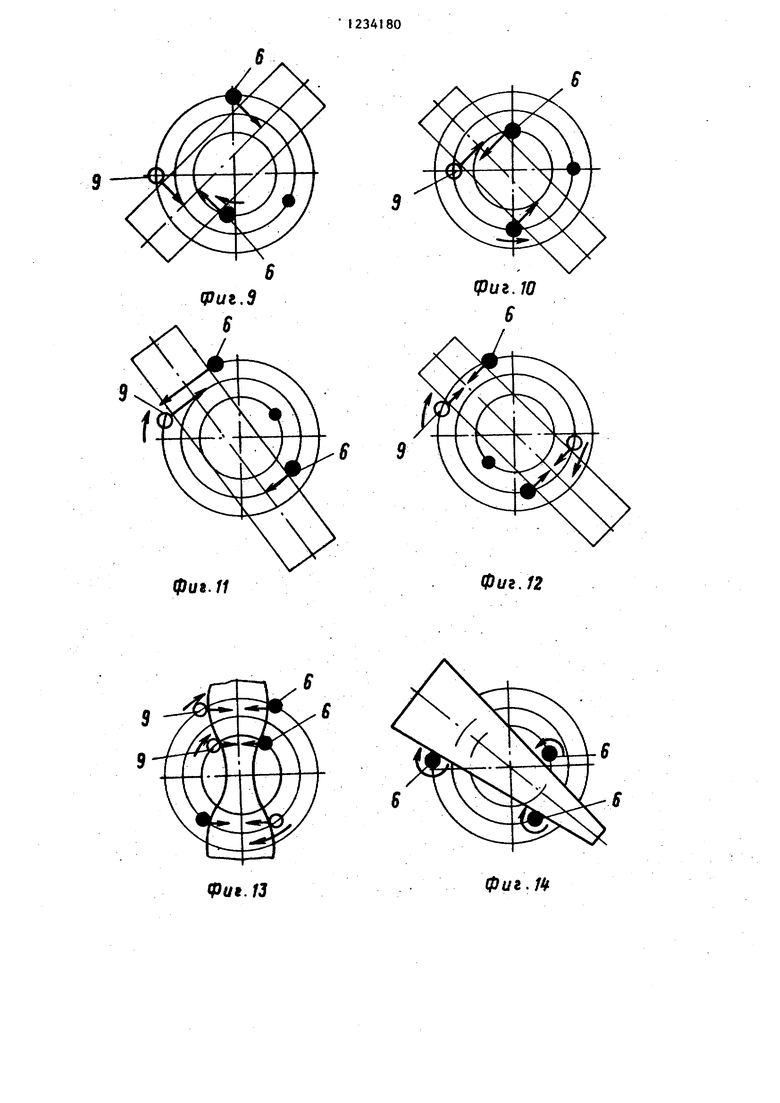
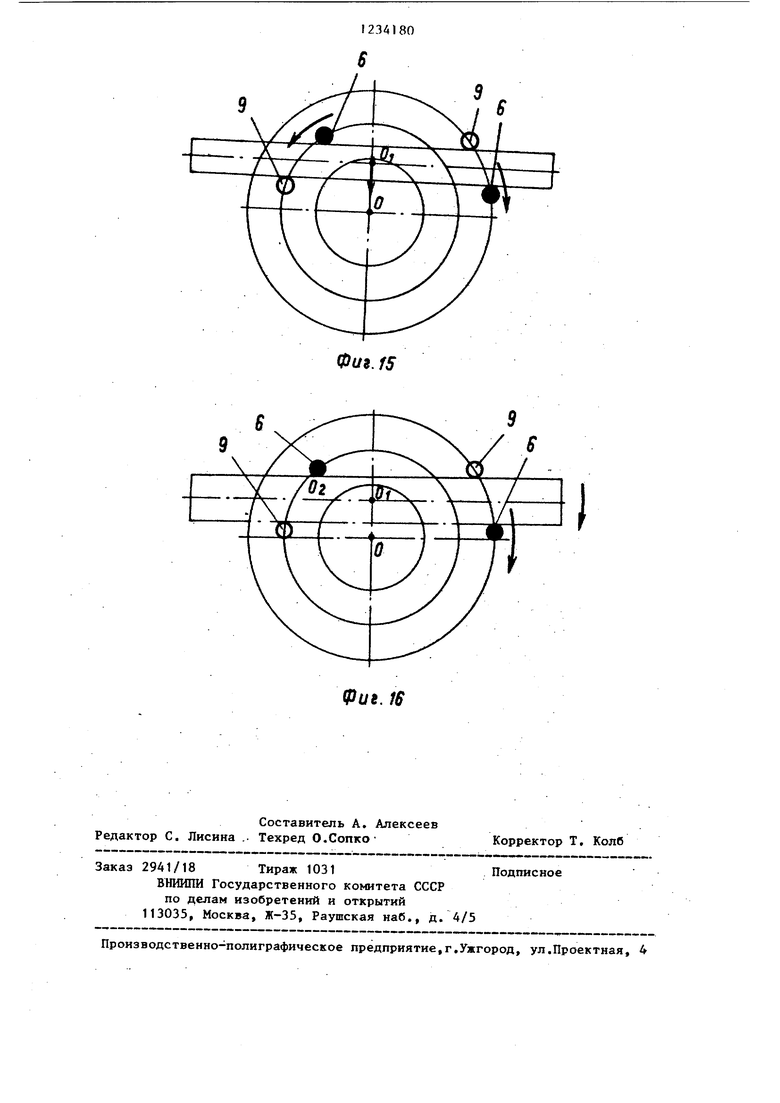
На фиг. 1 схематически изображено захватное устройство, продольный разрез; на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - один из возможных вариантов положения детали в захватном устройстве при окончаний подвода захвата к деталиJ на фиг. 6 - 8 - схема центрирования детали типа стержня с пересекающимися осями; на фиг. 9 - 1 некоторые варианты базирования детали в захвате; на фиг. 15 и 16 - не которые варианты манипулирования деталью в захвате.
Захватное устройство содержит корпус Г, в котором соосно установлены . стаканы 2 с возможностью вращения относительно оси захватного устройства. Для этого, например, с внутренней и наружной сторон стакана 2, а также в корпусе 1 выполнены кол цевые канавки, которые заполнены шариками 3. Каждый стакан 2 имеет зубчатый венец, которым кинематически связан с дискретным приводом, например шаговым двигателем 4, в цепь управления которого установлен чув- ствительньй элемент 5, например реле тока. В стакане 2 установлен палец 6 в виде стержня с возможностью вращения относительно собственной оси, связанный с приводом 7 вращения. В стакане 2 имеется внутренняя полость в виде части полого цилиндра, ось которого совпадает с осью стакана 2. В полости стакана 2 установлен поршень 8 неполноповоротного. силового цилиндра. В полости поршня 8 размещен поршень со штоком 9 силового цилиндра линейного перемещения. Поршень 8 связан с чyвcтвитeJ|ьным элементом - датчиком 10 положения, уст- тановленным в стакане 2. Для подачи сжатого воздуха в поршневые полости силового цилиндра линейного перемещения, а также в полости, образо
5
0
5
ванные кольцевыми поршнем 8 и стаканом 2, захватное устройство содержит распределительные устройства 11 и 12 соответственно, которые связаны с системой 13 управления, равно как и приводы 4 и 7, а также чувствительные элементы 10.
Захватное устройство работает следующим образом.
Захват и манипулирование деталью типа изогнутого стержня с пересекающимися осями. В исходном положении деталь расположена так, что центр (точка пересечения осей) не совпадает с осью захватного устройства. Пальцы 6 расположены на одной линии диаметрально противоположно. При подводе захвата к детали пальцы 6 охватывают деталь так, как показано на фиг. 5. После окончания подвода захватного устройства к детали система 13 управления включает приводы 4, которые вращают стаканы 2 до касания пальцами 6 детали. При касании пальцами 6 детали резко возрастают момент и, соответственноj ток на приводе 4 и последние останавливаются .(или выключаются) по мере касания вращаемых ими пальцев 6 с деталью и срабатывании при этом чувствительных элементов 5.
После остановки всех приводов 4 и соответственно вращаемых ими стаканов 2 система 13 управления переклю- 5 чает распределительные устройства 11. При этом избыточное давление (сжатый воздух) из подпорщневой полости штока 9 переключается в надпоршневую полость. Штоки 9 вьщвигаются из поршня 8 и охватывают деталь. После выдвижения поршня 8 штоков 9 переключаются распределительные устройства 12 для подачи избыточного давления в полость неполноповоротного силового цилиндра. При этом уровень избыточного давления определен таким, чтобы усилия зажима детали были меньше усилий, создаваемых приводами 4 при их включении с рабочей нагрузкой, т.е. не с нагрузкой холостого хрда, на который расчитан чувствительный элемент 5, а с моментом, создаваемым двигателем 7. При этом поршни 8 поворачиваются в полости стакана 2 и вместе с ними перемещаются штоки 9 до касания с деталью. касании штоков 9 с деталью поршни 8 останав0
0
5
0
5
ливаются.
Далее система управления включает привод 4 одного из стаканов 2.(фиг.6 При вращении стакана 2 в ту или другую сторону деталь также поворачивается относительно противоположно расположенных пальцев 6 и штоков 9. При этом, если деталь поворачивается к центру захвата, то расстояние между пальцами 6 и штоками 9 уменьшается Если деталь удаляется от центра зах- вата, то расстояние между пальцами 6 и штокоми 9 увеличивается. Изме- нение расстояния между пальцами 6 и штоками 9 определяет чувствительный элемент 10, с ломощью которого система 13 управления выбирает направление вращения стакана 2 для перемещения детали к центру захватного устройства. В положении, когда ось части детали, охваченной пальцами 6 и штоками 9 неподвижных стаканов, проходит, через центр, как показано на фиг. 7, расстояние между пальцами 6 и штоками 9 минимально (например, на этот размер настроена система 13 управления) и вращение стакана 2 прекращается.
После этого система управления включает.приводы 7 тех пальцев, которые охватывают часть детали, ось которой проходит через центр захвата. При этом чувствительный элемент 10 стакана 2, палец 6 и шток 9 которого охватывают часть детали, ось которой не проходит через центр захвата,, j, устройство готово к следующей oneопределяет направление вращения приводов 7 и их пальцев, т.е. при приближении центра детали (точка 0) к центру захвата (точка О) расстояние между пальцем 6 и штоком 9 уменьшается, при перемещении детали отно-
сительно захвата в противоположном направлении расстояние между пальцем 6 и штоком 9 увеличивается. При перемещении центра детали (точка 0 ) к центру захвата (точка О), как показано на фиг. 7, центр детали и центр захватного устройства совпадают (фиг. 8). При этом расстояние между пальцем 6 и штоком 9 минимально, о чем чувствительный элемент 10, установленный в этом стакане, вьща- ет сигнал в систему 13 управления. При этом деталь и захватное устройство сцентрированы относительно друг друга. Далее осуществляется перенос детали в предназначенное место манипулятором (не показан).
Система 13 управления при этом может содержать подпрограмму поворота детали относительно корпуса 1 на любой угол. Например, при переносе детали в предназначенное место система 13 управления может включить приводы 4 для выполнения доворота станков в исходное положение. Для освобождения детали система управления переключает распределительные устройства 12 для отвода от детали штоков 9 вместе с кольцевыми поршнями 8. Далее приводы 4 разворачивают стаканы 2 в исходное положение а распределительные устройства 11 переключают давление, и шток 9 устанавливается в поршень 8. Захватное
рации.
Изобретение обеспечивает захват деталей с различными схемами базирования и центрирование деталей различных типов. .
/ 982
12 Htt|: JIXtz)
шаа
фуг.;
V
fpuz.2 Б- Б повернуто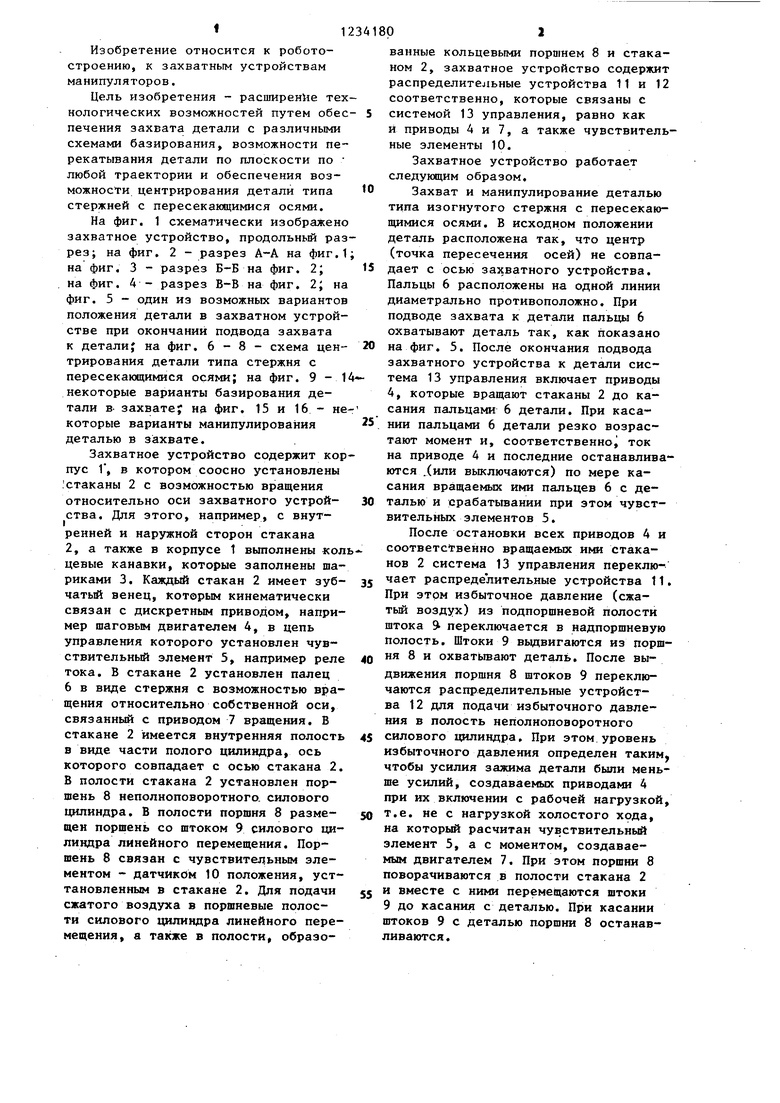
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1987 |
|
SU1511114A1 |
| Захват для неориентированных деталей типа валов | 1983 |
|
SU1135640A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| Устройство для базирования деталей по отверстию | 1987 |
|
SU1505743A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1521581A1 |
| Манипулятор | 1984 |
|
SU1207754A1 |
| ПНЕВМОУСИЛИТЕЛЬ | 2002 |
|
RU2235222C2 |
| Захватное устройство | 1984 |
|
SU1266735A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
т
i
фив.З
S- 8 neitpHi/nv
фиг.5
Фиг.$
Фиъ. 7
фиг. 8
фиг. 11
Фиг. 12
Фи9.13
фиг. /«
Фи9. fS
Составитель А, Алексеев Редактор С. Лисина .. Техред О.Сопко
Заказ 2941/18 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная, 4
fpui. 16
Корректор Т, Колб
| Захват для неориентированных деталей типа валов | 1983 |
|
SU1135640A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
