{
315
Изобретение относится к машиностроении и может быть использовано в промышленных роботах и манипуляторах, обслуживающих технологическое обору- дование.
Цель изобретения - расширение технологических возможностей путем захвата деталей различной конфигурации.
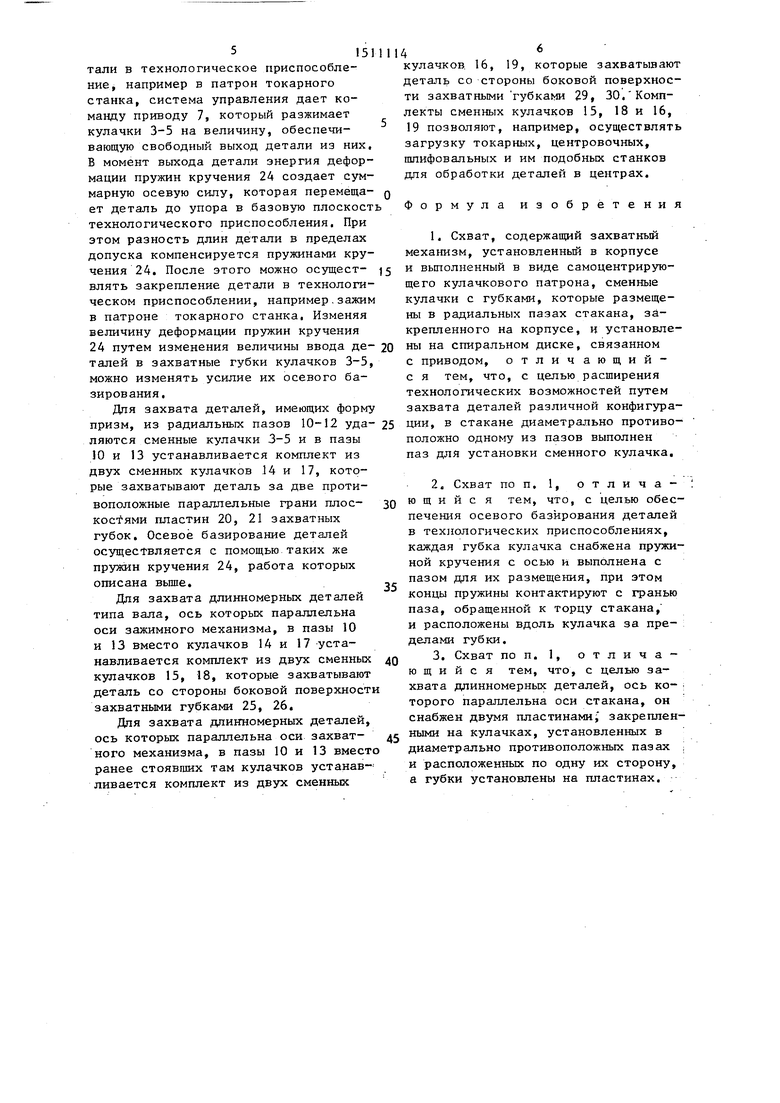
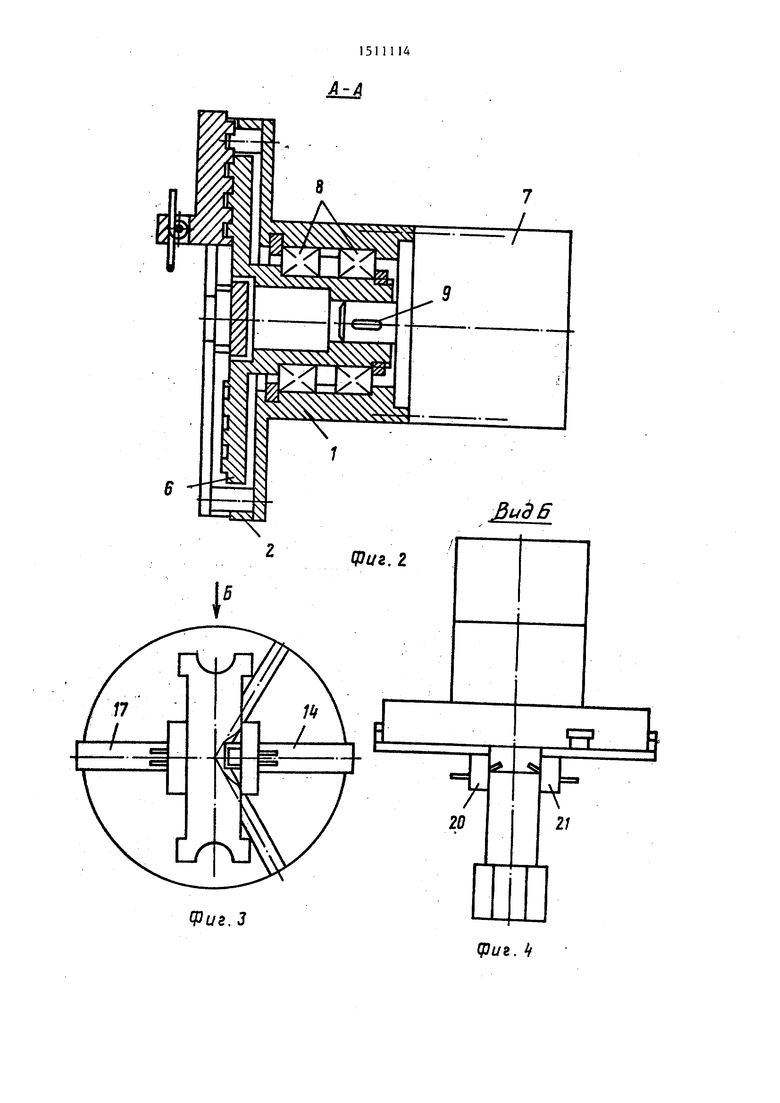
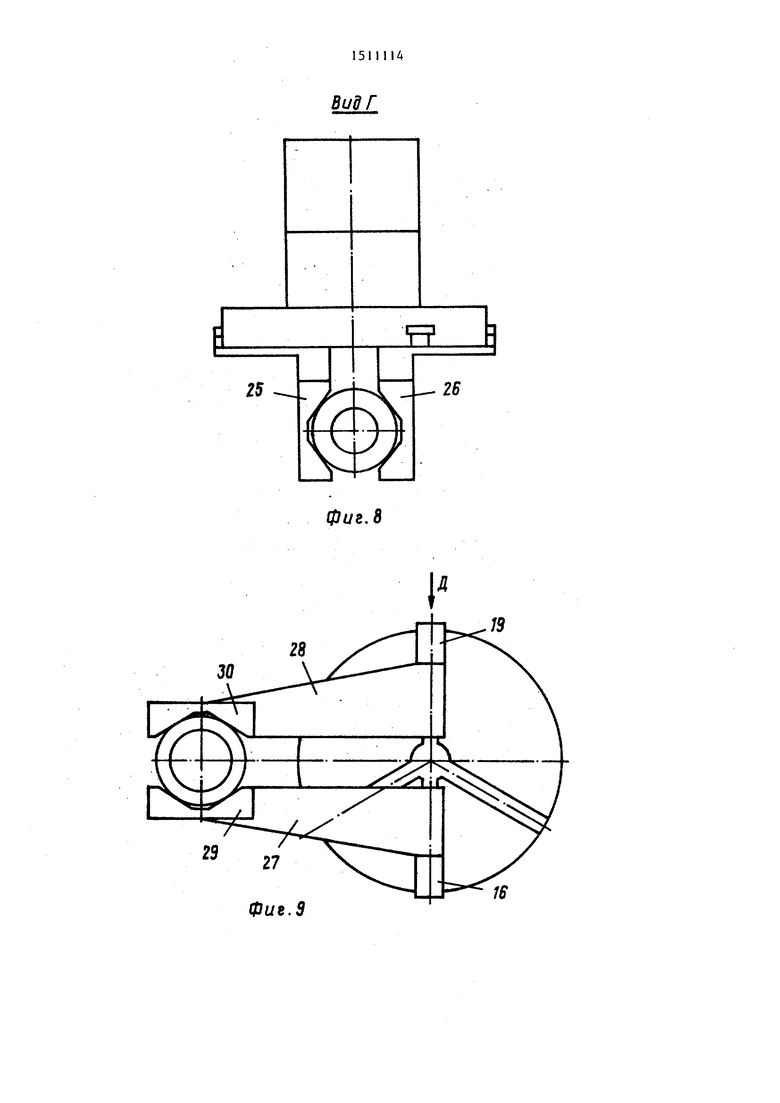
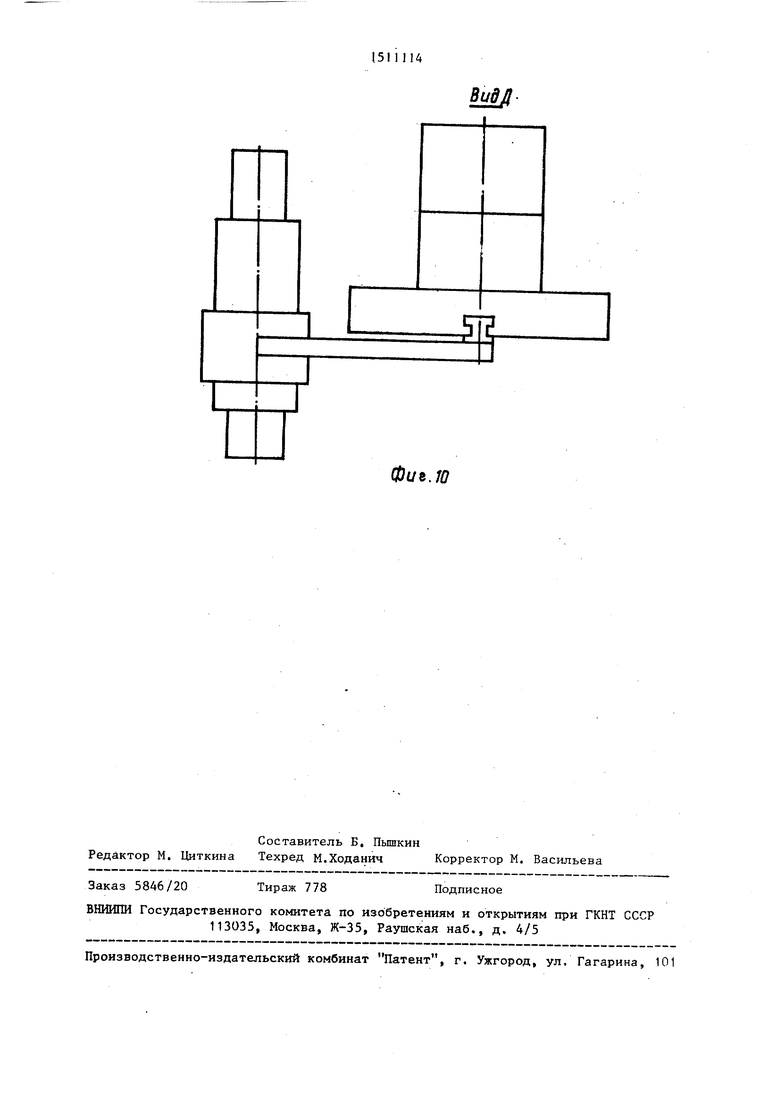
На фиг, 1 изображено захватное уст ройство; на фиг. 2 - разрез А-А на фиг, 1; на фиг, 3 - захватное устройство с комплектом кулачков для захвата деталей, имеющих форму призм С числом параллельных граней, кратны двум; на фиг, 4 - вид Б на фиг, 3; на фиг, 5 - кулачок с устройством осевого базирования; на фиг, 6 - разрез В-В на фиг, 5; .на фиг, 7 - захватное устройство с комплектом ку- лачков для захвата длинномерных деталей, ось которых перпендикулярна оси зажимного механизма; на фиг, 8 - вид Г на фиг, 7; на фиг, 9 - захватное устройство с комплектом кулачков для захвата длинномерных деталей, ось которых параллельна оси зажимного механизма; на фиг, 10 - вид Д на фиг, 9,
Захватное устройство состоит из корпуса I с установленньЕМ в нем захватным механизмом, выполненным в виде самодентрирующего кулачкового патрона, закрепленного на корпусе стакана 2, сменных кулачков 3-5 с губ- ками, размещенными в радиальных пазах стакана 2 и установленными на спиральном диске 6, связанном с приводом 7, Спиральный диск 6 установлен в корпусе 1 на подшипниках 8 и сое- динен с приводом 7 через шпонку 9,
В стакане 2 выполнены три паза - 10-12, в которых установлены сменные кулачки 3-5, служащие для захват.а цилиндрических деталей со стороны торца, ось которых совпадает с осью
захватного ме санизма,
I..
Для захвата деталей различной конфигурации в стакане 2 диаметраль- но противоположно одному из пазов 10 12 выполнен паз 13 для установки сменных кулачков 14-16, которые в паре со сменными кулачками 17-19, установленными вместо сменных кулач- ков 3-5, составляют комплект кулачков. Например, для захвата деталей, имеющих форму призм, два сменных кулачка 14 и 17, входящие в комплект
5
11
5
0 5
5 0
5
Q
0
144
имеют зажимные губки в виде пластин 20 и 21,
Для осуществления осевого базирования деталей каждый из кулачков 3-5 одного комплекта и каждый из кулачков 14 и 17 другого комплекта имеют в зажимной губке сквозной паз 22, параллельный торцу стакана 2, В пазу 22 на оси 23 установлена пружина кручения 24, прямолинейные концы которой опираются на грань лаза, обращенную к торцу стакана 2, и расположены вдоль кулачка за пределами губки.
Для захвата длинномерных деталей типа вала, оси которых перпендикулярны оси захватного механизма, два кулачка 15, 18 имеют зажимные губки. 25, 26, выполненные в виде призм, оси которых перпендикулярны оси захватного механизма.
Для захвата длинномерных деталей типа вала, оси которых параллельны оси захватного механизма два кулачка 16, 19 имеют зажимную часть, выполненную в виде пластин 27, 28, размещенных по одну сторону от диаметра стакана 2 и параллельных его торцу, на концах которых жестко закреплены зажимные губки 29, 30, ос и которых параллельны оси захватного механизма.
Захватное устройство работает следующим образом.
Для захвата деталей типа тел вращения со стороны их торца и соосных оси захватного механизма в радиальные пазы .10-12 устанавливается комплект сменных кулачков 3-5, По команде системы управления привод 7 через шпонку 9 вращает спиральный диск 6, который через спирально-реечное зацепление перемещает кулачки 3-5 в радиальных пазах 10-12 стакана 2 на величину, обеспечивающую свободный захват детали за наружную или внутреннюю цилиндрическую поверхность. При осевом ходе захватного устройст- ва захватьгоаемой детали прямолинейные концы пружины кручения 24 упираются в торец детали и изгибаются при дальнейшем линейном пяремещении захватного устройства на заданную величину до момента его остановки,
.Далее по команде системы управления привод 7 перемещает кулачки 3-5, осуществляя зажим детали, при этом пружины кручения 24 остаются,в напряженном состоянии. После переноса де515
тали в технологическое приспособление, например в патрон токарного станка, система управления дает команду приводу 7, который разжимает кулачки 3-5 на величину, обеспечивающую свободный выход детали из них, В момент выхода детали энергия деформации пружин кручения 24 создает суммарную осевую силу, которая перемеща- ет деталь до упора в базовую плоскост технологического приспособления. При этом разность длин детали в пределах допуска компенсируется пружинами кручения 24, После этого можно осущест- влять закрепление детали в технологическом приспособлении, например,зажим в патроне токарного станка. Изменяя величину деформации пружин кручения
g 5
1114
кулачков. 16, 19, которые захватывают
деталь со стороны боковой поверхности захватными губками 29, 30, Комплекты сменных кулачков 15, 18 и 16, 19 позволяют, например, осуществлять загрузку токарных, центровочных, шлифовальных и им подобных станков дпя обработки деталей в центрах,
п
Формула изобретения
1, Схват, содержащий захватный механизм, установленный в корпусе и выполненный в виде самоцентрирующего кулачкового патрона, сменные кулачки с губками, которые размещены в радиальных пазах стакана, закрепленного на корпусе, и установле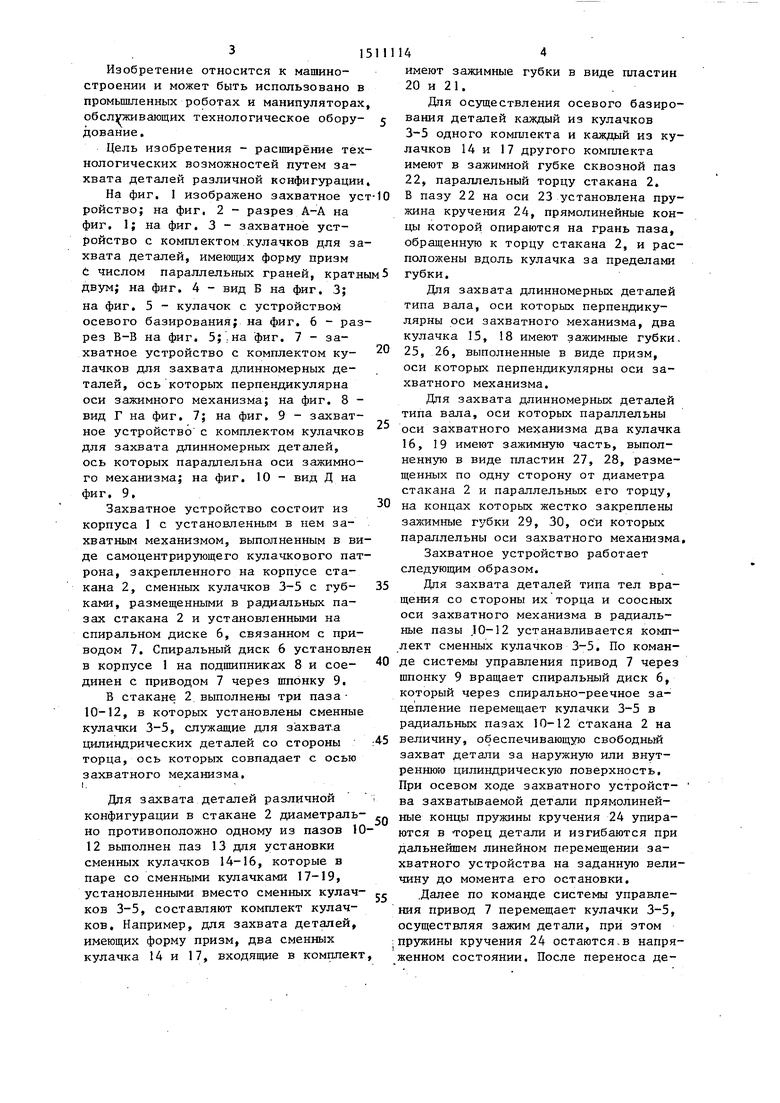
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1981 |
|
SU994256A1 |
| Самоцентрирующийся патрон | 1985 |
|
SU1273216A1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Загрузочное устройство | 1985 |
|
SU1315227A1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах, обслуживающих технологическое оборудование. Целью изобретения является расширение технологических возможностей путем захвата деталей различной конфигурации. Схват состоит из корпуса с установленным в нем захватным механизмом, выполненным в виде самоцентрирующего кулачкового патрона, закрепленного на корпусе, стакана 2, сменных кулачков 3,4,5 с губками, размещенными в радиальных пазах стакана 2, и установленными на спиральном диске 6, связанном с приводом. Спиральный диск расположен в корпусе на подшипниках и соединен с приводом через шпонку. В стакане 2 выполнены пазы 10, 11, 12, в которых установлены сменные кулачки 3, 4, 5 для захвата цилиндрических деталей, и паз 13, диаметрально противоположный одному из пазов 10, 11, 12, служащий для установки спаренных сменных кулачков вместо сменных кулачков 3, 4, 5, захватывающих длинномерные детали различной конфигурации, оси которых перпендикулярны или параллельны осям захватного механизма. В губках кулачков 3, 4, 5 и кулачков, составляющих с ними комплект, выполнены пазы, в которых расположены пружины кручения, используемые при осевом базировании. 2 з.п. ф-лы, 10 ил.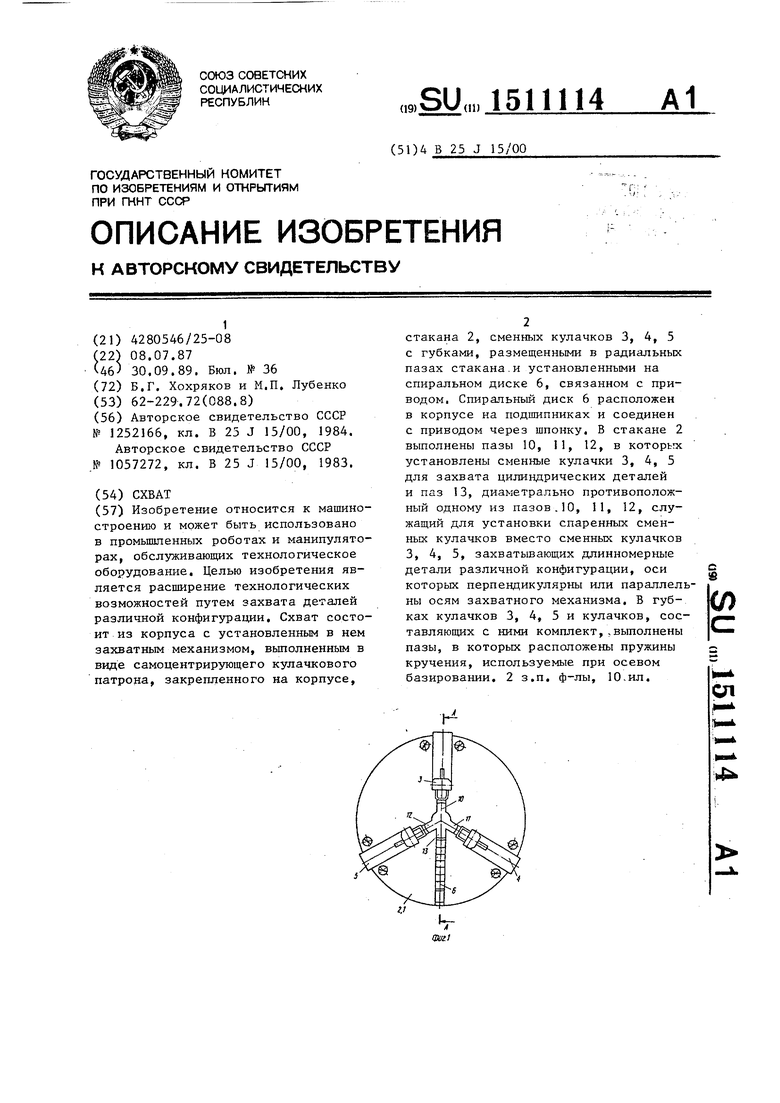
24 путем изменения величины ввода де- 20 нь1 на спиральном диске, связанном
талей в захватные губки кулачков 3-5 можно изменять усилие их осевого базирования,
Дпя захвата деталей, имеющих форму призм, из радиальных пазов 10-12 уда- ляются сменные кулачки 3-5 и в пазы 10 и 13 устанавливается комплект из двух сменных кулачков J4 и 17, которые захватывают деталь за две противоположные параллельные грани плос- костями пластин 20, 21 захватных губок. Осевое базирование деталей осуществляется с помощью таких же пружин кручения 24, работа которых описана выше.
Для захвата длинномерных деталей типа вала, ось которых параллельна оси зажимного механизма, в пазы 10 и 13 вместо кулачков 14 и 17 устанавливается комплект из двух сменных кулачков 15, 18, которые захватывают деталь со стороны боковой поверхност захватными губками 25, 26.
Дпя захвата длинномерных деталей, ось которых параллельна оси захват- ного механизма, в пазы 10 и 13 вмест ранее стоявпюх там кулачков устанавливается комплект из двух сменных
5 О
5
5
0
с приводом, отличающий- с я тем, что, с целью расширения технологических возможностей путем захвата деталей различной конфигурации, в стакане диаметрально противоположно одному из пазов выполнен паз для установки сменного кулачка.
и расположены вдоль кулачка за пределами губки,
3,Схват поп, 1, отличающийся тем, что, с целью захвата длинномерных деталей, ось ко- . торого параллельна оси стакана, он снабжен двумя пластинамиi закрепленными на кулачках, установленных в диаметрально противоположных пазах ; и расположенных по одну их сторону,
а губки установлены на пластинах.
. J
(риг.
В
г
Ih
/
2if
/ 23
фиг. 5
В-В
Фиг.В
Фиг.7
Вид Г
Фив. 8
23
27
фие.З
16
ВидД
Фив. JO
| Захватное устройство | 1984 |
|
SU1252166A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Схват | 1982 |
|
SU1057272A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
