(Л
СП
ю сд
00
НИИ при манипулировании за счет увеличения, жесткости устройства и увеличение надежности базирования детали при захвате и освобождении от него. Устройство содержит сочлененные с корпусом 1 и связанные с приводом пальцы, собранные из звеньев 2 с фасонными поверхностями и соединенные между собой шарнирно посредством осей 3. В звеньях образованы отверстия. В отверстиях, смещенных к продольной оси устройства, установлен упругий элемент 4 с возможностью перемещения вдоль него звеньев 2, Концы элемента 4 установлены с возможностью перемещения в конечном звене 8 пальца и в толкателе 6. Толкатель 6 связан с приводом посредством щтока 12, на нем установлены неподвижно профилированные части 11, с которыми связаны звенья 2 пальцев. В отверстиях звеньев 2, образованных на их периферии ближе к внутренней ;стенке корпуса 1, установлен дополнитель иый упругий элемент растяжения, укреплен- ный одним концом в конечном звене 8 пальца, а другим - в корпусе 1. Корпус 1 снабжен опорным элементом 13, установленным
с возможностью перемещения на его внешней поверхности. Элемент 13 подпружинен относительно основания корпуса пружиной 14 сжатия, охватывающей корпус. Захват детали производится путем установки корпуса 1 в отверстие или внутреннюю полость. Пальцы под действием привода выдвигаются из корпуса 1, при этом звенья 2, поворачиваясь относительно Осей 3 под действием: элементов 4 и 9, захватывают деталь. Упругий элемент 9 при движении частей .11
укладывается в паз 10. Базирование детали осущ;ествляется опорным элементом 13, прижимающим деталь к основанию посредством пружины 14 во время выдвижения и установки в исходное положение звеньев 2
пальцев. 1 з. п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| Захватное устройство | 1991 |
|
SU1816689A1 |
| Манипулятор | 1986 |
|
SU1371900A1 |
| Система для манипулирования и закрепления обрабатываемой лопатки | 2023 |
|
RU2818554C1 |
| Захватное устройство | 1984 |
|
SU1234180A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Универсальное захватное устройство | 1989 |
|
SU1641610A1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2018 |
|
RU2761389C1 |
Изобретение относится к роботостроению, в частности к конструкции захватных устройств роботов и манипуляторов. Цель изобретения - повышение надежности удержания детали в определенном положении при манипулировании за счет увеличения жесткости устройства и увеличение надежности базирования детали при захвате и освобождении от него. Устройство содержит сочлененные с корпусом 1 и связанные с приводом пальцы, собранные из звеньев 2 с фасонными поверхностями и соединенные между собой шарнирно посредством осей 3. В звеньях образованы отверстия. В отверстиях, смещенных к продольной оси устройства, установлен упругий элемент 4 с возможностью перемещения вдоль него звеньев 2. Концы элемента 4 установлены с возможностью перемещения в конечном звене 8 пальца и в толкателе 6. Толкатель 6 связан с приводом посредством штока 12, на нем установлены неподвижно профилированные части 11, с которыми связаны звенья 2 пальцев. В отверстиях звеньев 2, образованных на их периферии ближе к внутренней стенке корпуса 1, установлен дополнительный упругий элемент 9 растяжения, укрепленный одним концом в конечном звене 8 пальца, а другим - в корпусе 1. Корпус 1 снабжен опорным элементом 13, установленным с возможностью перемещения на его внешней поверхности. Элемент 13 подпружинен относительно основания корпуса пружиной 14 сжатия, охватывающей корпус. Захват детали производится путем установки корпуса 1 в отверстие или внутреннюю полость. Пальцы под действием привода выдвигаются из корпуса 1, при этом звенья 2, поворачиваясь относительно осей 3 под действием элементов 4 и 9, захватывают деталь. Упругий элемент 9 при движении частей 11 укладывается в паз 10. Базирование детали осуществляется опорным элементом 13, прижимающим деталь к основанию посредством пружины 14 во время выдвижения и установки в исходное положение звеньев 2 пальцев. 1 з.п. ф-лы, 1 ил.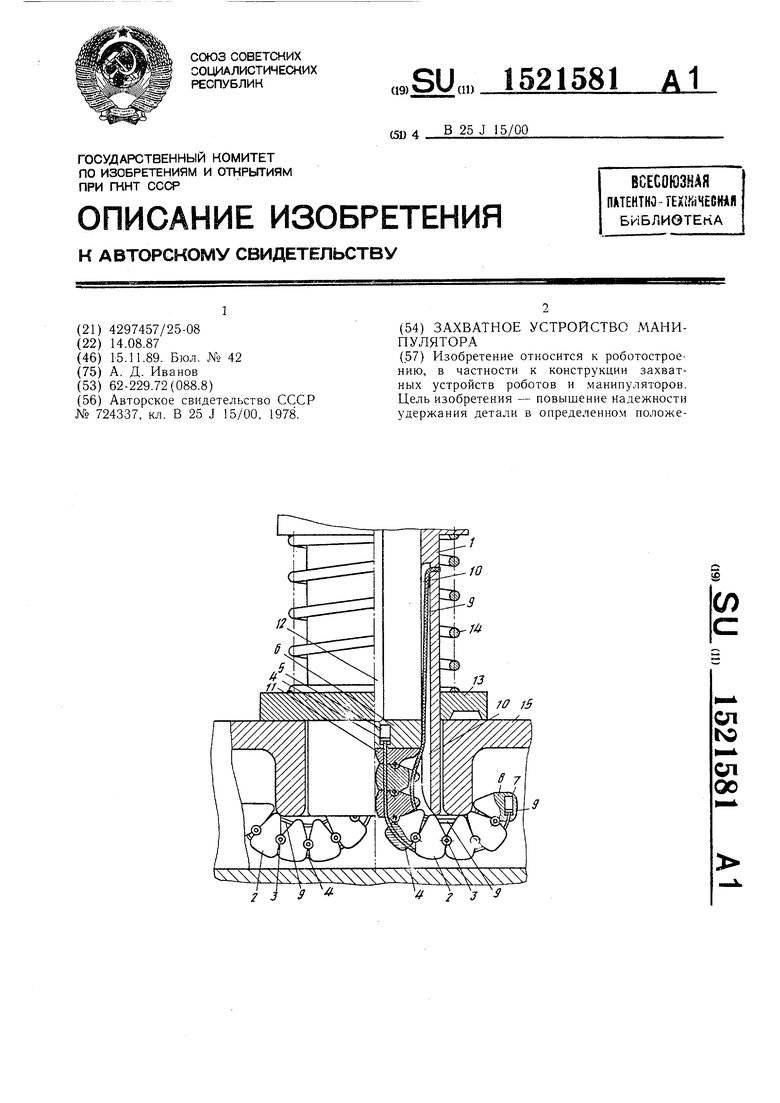
Изобретение относится к роботостроению, в частности к конструкции захватных устройств роботов и манипуляторов.
Целью изобретения является повышение надежности удержания детали в определенном положении при манипулировании за счет увеличения жесткости устройства, упрощение привода и устройства программного управления, обеспечивающих функционирование захвата, а также увеличение надежности базирования детали при захвате и освобождении от него.
На чертеже изображено устройство в рабочем положении.
Захватное устройство манипулятора содержит продолговатый полый корпус 1 с размещенными в нем пальцами, включающими звенья 2, соединенные между собой шарнирно посредством осей 3. В звеньях 2 параллельно продольной оси устройства образованы отверстия, размещенные на их периферии. В отверстиях, смещенных относительно оси щарниров к центру устройства, .установлен с возможностью перемещения вдоль него звеньев 2, упругий элемент 4. Для концов элемента 4 образованы полость 5 в толкателе 6 и полость 7 в-конечном звене 8. В отверстиях, смещенных относительно оси щарниров к корпусу 1 устройства, установлен упругий элемент 9. Элемент 9 закреплен одним концом на корпусе 1, выще начального звена 2 пальца, а другим концом - в конечном звене 8 пальца неподвижно. На внутренней поверхности корпуса 1 . В плоскости продольной оси устройства образованы продольные пазы 10 с возмож- ностью укладки в них упругих элементов 9.
при выдвижении пальцев. Звенья 2 имеют фасонную поверхность расчетной формы, которая обусловлена взаимодействием стыкуемых поверхностей звеньев 2 в исходном
( и рабочем положении, а также взаимодействием между собой пальцев при их выдвижении и установке в исходное положение, надежностью захвата детали с различной конфигурацией охватываемых поверхностей. Толкатель 6 включает профилированные час5 ти 11, закрепленные на нем неподвижно и раздельные для каждого пальца. Форма их поверхности имеет расчетный профиль, определенный взаимодействием с начальным звеном 2 пальца, а также возр можностью укладки элемента 9 в. паз 10 при выдвижении пальцев. На частях 11 закреп- , лены шарнирно начальньге звенья 2 на осях 3. Толкатель 6 установлен с возможностью продольного перемещения под действием привода, например силового цилиндра, со што5 ком 12 которого он связан. Элемент 9 изготовлен, например, из полимерного пластического материала или в виде стальной пружины растяжения, одной из вариантов которой может быть круглая стальная пружина с установленным внутри в свободном
0 состоянии тросиком, закрепленным одним концом на нижнем конце пружины неподвижно, а другим кйнцом выведенным за корпус 1, и снабжен элементами регулировки длины для определенного типоразмера деталей. Сила упругости элемента 9 опреде5 ляется в основном ориентировочной массой группы захватываемых деталей.
Пружинный элемент 4 выполнен в виде плоской стальной пружины изгиба, установленной с возможностью перемещения при функционировании устройства своими концами в полостях 5 и 7. Элемент 4 установлен в напряженном состоянии. Сила упругости направлена от продольной оси устройства. На внешней поверхности корпуса 1 установлен, с возможностью перемещения вдоль нее, опорный элемент 13, например, в виде профилированного кольца. Элемент 13 подпружинен относительно основания корпуса пружиной 14 сжатия, например, из круглой стальной проволоки, охватывающей корпус 1 и закрепленной верхним концом на корпусе 1, а нижним - на элементе 13.
Захватное устройство манипулятора работает следующим образом.
При захвате детали корпус 1 устройства устанавливается в отверстие или внутреннюю полость при движении, например, руки манипулятора вертикально вниз до упора в наружную поверхность детали опорного элемента .13 и сжатия на необходимую величину пружины 14. Для захвата детали паль- цами усилие от привода, например силового цилиндра, через его щток 12 передается на толкатель 6, который совместно с частями П движется по внутренней поверхности корпуса I вниз. При этом производится .выдвижение пальцев из корпуса 1. Звенья 2, начиная с начального, под действием-упругих элементов 9 и 4 разворачиваются относительно осей 3 шарниров. При движении звеньев 2 вниз профилированной поверхностью частей 11 производится укладка элемента 9 в паз 10 корпуса 1. Количество выдвинутых звеньев 2 из корпуса 1 определяется характером захватываемой поверхности, а также массой детали. При выдвижении пальцев элемент 4 перемещается своими концами в полостях 5 и 7. Освобождение детали от захвата осуществляется в обратном порядке, при движении толкателя 6 совместно с частями 11 и звеньями 2 пальцев вверх. После установки пальцев в корпус 1 под действием, например, привода руки манипулятрра устройство движется вер0
тикально вверх. Под действием силы упру гости пружины 14 деталь элементом 13 удерживается на месте установки. Следовательно, при захвате и освобождении дета- ли, за счет прижатия детали опорным элементом 13 исключается влияние скользящих по детали поверхностей звеньев 2 на положение детали, т. е. ее базирование. Кроме того, этим же элементом 13 совместно с
д силой прижатия охватывающих деталей пальцев обеспечивается дополнительное отжатне и удержание детали пр.и манипулировании.
Формула изобретения
5 I. Захватное устройство манипулятора, содержащее полый корпус и связанные с приводом пальцы, собранные из звеньев с фасонными повер хностями и отверстиями, установленных на упругом элементе с возможностью перемещения вдоль него, причем отверстия в звеньях смещены относительно геометрического центра звеньев, отличающееся тем, что, с целью повышения надежности удержания детали в определенном положении при манипулировании за счет по5 вышения жесткости устройства, звенья пальцев соединены между собой шарнирно и установлены в полости корпуса с возможностью перемещения от толкателя, причем упругий элемент установлен в отверстиях звеньев, смещенных к продольной оси устройства, и одним концом закреплен на толкателе, а другим - на конечном звене пальца, кроме того, в отверс/иях, смещенных к внешней стороне звеньев, установлен дополнительный упругий элемент растяжения, закрепленный одним концом в корпусе, а другим - в конечном звене пальца.
0
5
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
