Изобретение относится к области робототехники, в частности к рабочим органам промышленных роботов, для захвата и транспортировки изделий.
Цель изобретения - повышение надеж- ности и уменьшение габаритов устройства,
На чертеже показано устройство в разрезе.
Захватное устройство содержит корпус 1, в котором установлена направляющая скалка 2, несущая подвижные губки 3 и 4. В центре корпуса установлен силовой цилиндр 5 с поршнем 6. К наружному концу штока 7 поршня крепится фланец 8, шар- нирно соединенный с губками 3 и 4 посред- ством наклонно установленных симметрично расположенных рычагов 9 и 10 соответственно,
По обе стороны от цилиндра 5 симметрично расположены две идентичные сцеп- ные муфты. Каждая из них содержит пружину сжатия 11, ограниченную вверху корпусом 1, а внизу - фланцем втулки-ограничителя 12. Втулка-ограничитель входит в направляющий стакан 13, жестко связан- ный с корпусом 1. Пальцы 14, закрепленные на фланце 8, входят в отверстия ограничителя 12. В гнездах ограничителей 12 находятся шарики 15. На пальце 14 и в стакане 13 предусмотрены кольцевые выточки под шарики 15.
При подаче давления в поршневую полость цилиндра 5 поршень 6 со штоком 7 и фланцем 8 опускаются. Рычаги 9 и 10, раздвигаясь, обеспечивают встречное переме- щение губок 3 и 4. Происходит быстрый подвод губок к изделию. В начале перемещения пружины 11 не работают, так как ограничены корпусом 1 и втулкой-ограничителем 12, которая посредством шариков 15
зафиксирована на стакане 13. В конце хода поршня канавка на пальцах 14 фланца 8 опускается на уровень шариков 15. последние, заскакивая в эти канавки, разъединяют стакан 13 и ограничитель 12.
В дальнейшем перемещение фланца 8 вниз происходит вместе с ограничителем 12. При этом пружины 11 воздействуют на рычаги 9 и 10, причем по мере приближения рычагов к горизонтальному положению усилие, передаваемое ими на губки, резко возрастает. Происходит зажим изделия в губках. Рычаги 9 и 10 при этом занимаю положение, близкое к горизонтальному При разжиме давление подается в штоко- вую полость. Фланец 8 поднимается, через рычаги 9 и 10 разводя губки 3 и 4 и сжимая пружины 11 до того момента, когда шарики 15 ограничителя 12 и выточка на стакане 13 совмещаются, пружина 11 замыкается между корпусом 1 и ограничителем 12 и выключается.
Формула изобретения Захватное устройство, содержащее корпус, установленные в нем с возможностью перемещения зажимные губки, смонтированные на ползунах, кинематически связанные с приводом их перемещения посредством тяг, отличающееся гем, что, с целью повышения надежности и уменьшения габаритов устройства, оно снабжено сцепными муфтами, каждая из которых выполнена в виде смонтированного на корпусе стакана, в полости которого коаксиально расположен палец, смонтированный на подвижном элементе привода, и втулка-ограничитель, подпружиненная относительно корпуса, при этом втулка-ограничитель и палец выполнены с возможностью их относительной фиксации.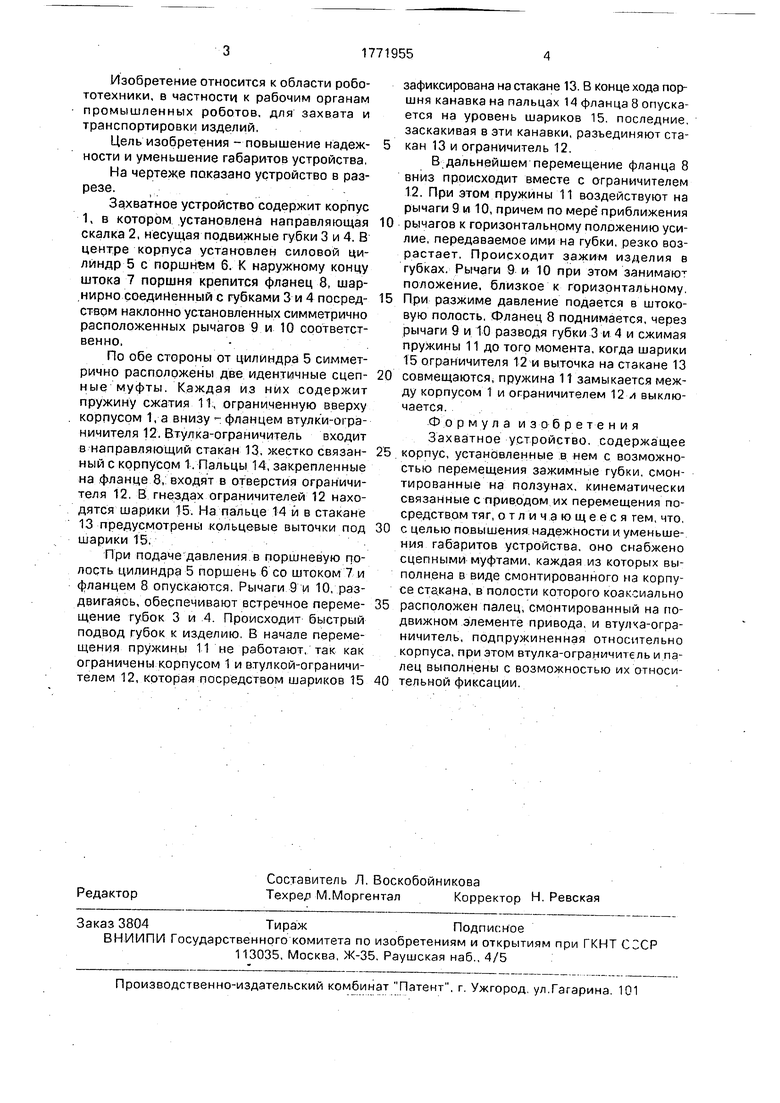
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Захватное устройство | 1984 |
|
SU1222542A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2003 |
|
RU2253039C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Устройство для зажима заготовок | 1989 |
|
SU1703262A1 |
Изобретение относится к робототехнике, в частности к устройствам для захвата и транспортирования цилиндрических деталей. Захватное устройство содержит подвижные губки 3. 4 с приводом силового цилиндра и сцепные муфты. С целью уменьМ , . .73 шения габаритов схвата и повышения надежности каждая из муфт выполнена в виде смонтированного на корпусе стакана 13, в полости которого расположены коаксиаль- но палец 14 и втулка-ограничитель 12, подпружиненная относительно корпуса. При этом втулка 12 и палец 14 выполнены с возможностью их относительной фиксации. Это позволяет включать сцепные муфты в работу только на небольшом участке перемещения губок и применять в нем коротко- ходовые пружины. Губки связаны с приводом шарнирно при помощи наклонных рычагов 9. 10, обеспечивающи резкое увеличение передаваемого усилия в момент сведения губок. 1 ил. 6 5 СО С vj xj N0 СП ел
| Схват | 1984 |
|
SU1178585A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
