Приспособление для обвязки пакетов и т. п. хлопчатобумажной лентой, концы которой соединяются в каждой обвязке впритык штифтовыми скрепками вдоль края пакета, управляемые вручную и устанавливаемые сверху на самом пакете, известны и представляют собой довольно сложное сочетание рычагов и натяжных устройств.
Описываемый автомат для обвязки пакетов и т. п. по конструкции упрощен и работает от привода.
Особенностью автомата является то, что он выполнен в виде установленного ниже пакета механизма для отмеривания с рулонов кусков требуемой длины ленты, и парных, по числу обвязок, соосно поворотных противоположно плеч, ось поворота которых проходит примерно через продольную ось пакета, несущих на концах скрепки, снимающие штифтами концы лент с механизма для отмеривания, обводящих ленты вокруг пакета и отгибающих при смыкании в сторону от их длины штифты скрепок, расположенные на плечах в шахматном порядке, пронзившие оба конца лент по линии, параллельной К1раю пакета.
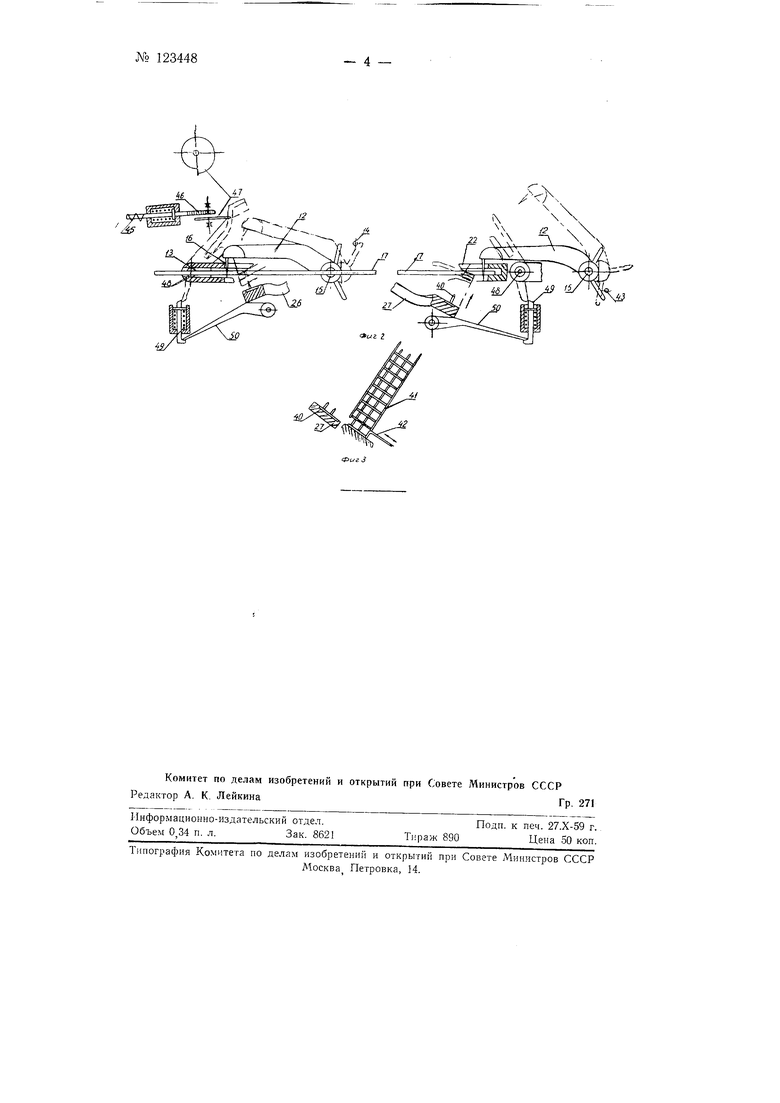
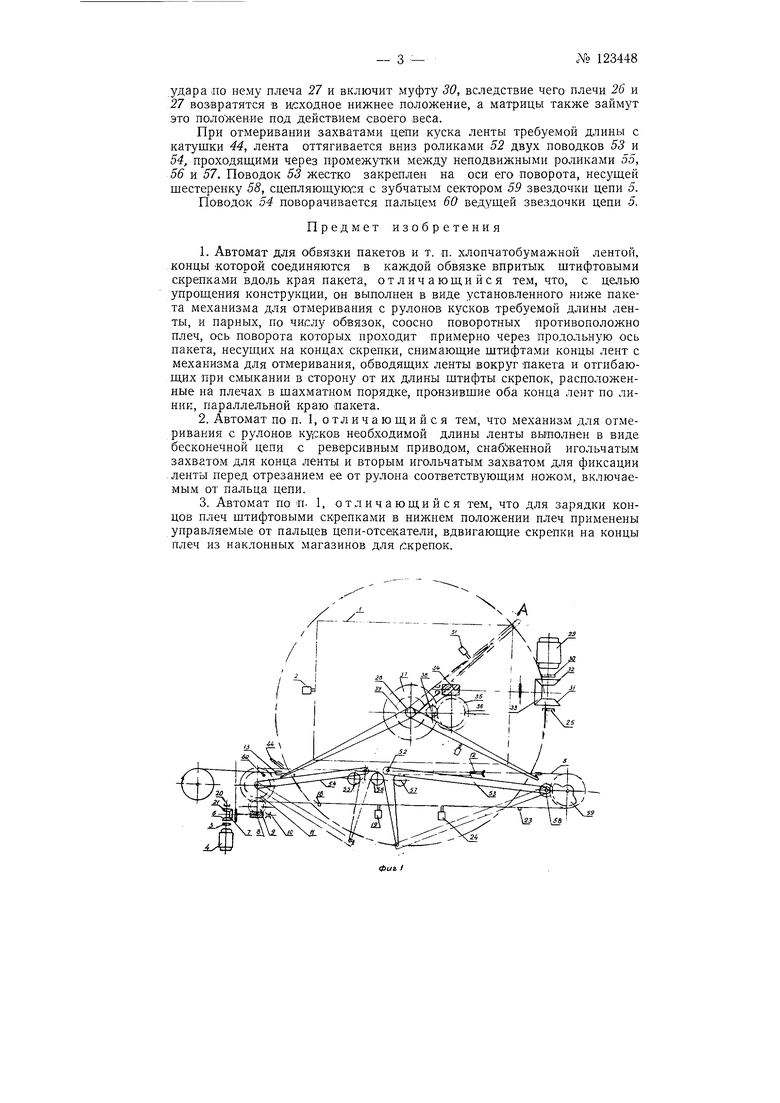
На фиг. I автомат изображен в продольном разрезе; на фиг. 2 - часть автомата в продольном разрезе; на фиг. 3 - часть автомата в поперечном разрезе.
Автомат может быть использован как станция обвязки в линии упаковки различных товаров, имеющей конвейер или рольганг для проводки пакетов и т. п. через автомат, включаемый в действие са.мим пакетом.
Пакет / подается к месту обвязки конвейером или рольгангом. Когда пакет займет необходимое положение, он нажимает на конечный выключатель 2, причем включается электрофрикционная муфта 3. Так как электродвигатель 4 работает непрерывно, то в движение придет бесконечная цепь 5 установленного ниже пакета механизма для отмеривания ленты. Для передачи движения цепи 5 от электродвигателя 4 приj fi 123448
менены конические шестерни 6, 7, редуктор 8, 9 и шестерни /(, // К звеньям цепи 5 прикреплен левый игольчатый захват 12 для ленты, который при подходе-к м атрице 13 приподнимается за счет упора хвостовика захвата в зайрепленный неподвижно штифт 14. Захват 12 выполнен поворотным, .вокруг оси 75 цепи 5, имеющей реверсивный привод. Когда хвостовик захвата 1у1инует штифт J4, то обе иглы 16 захвата вонзятся в хлопчатобумажную и т. л. ленту 17, нредназначенную для обвязки пакета.
Матрица предотвращает прогиб ленты 17 при вонзании в нее игл ./6 и снабжена двумя продольными прорезями для прохода игл. В то время когда иглы 16 захвата 12 пронизали конец ленты 17, палец 18, закрепленный на цепи 5, нажмет конечный выключатель 19, причем эдектрофрикционная муфта 3 выключится, а включится такая же муфта 20, вследствие чего передача к цепи 5 пойдет через шестерни 2/ и 7 и цепь 5 начнет двигаться в сторону от матрицы 13 - вправо (см. фиг. 2), таща за собой ленту 17 по направлению к правой матрице 22, причем штифт 23 цепи о толкнет конечный выключатель 24, вследствие чего электрофрикционная муфта 20 выключится и включится электрофрикционная муфта 25 привода парных по числу обвязок, соосно противоположно поворотных плеч 26 и 27, ось 28 noBOipoTa которых проходит примерно через продольную ось пакета 1.
Плечи 26 и 27 нриводятся в действие от электродвигателя .2Р при помощи электрофрикционных муфт 55, 30, конических шестерен 31, 32 и 33, червячного редуктора 34 и 55. На оси редуктора закреплена шестерня с, сцепленная с шестерней 37, жестко соединенной с плечом 27, и одновременно сцепленная с паразитной шестерней 38, сцепленной с шестерней 39, л естко соединенной с плечом 26. Плечи 26 и 27 вращаются с неодинаковой угловой скоростью вокруг оси 28, учитывая различные по .цлине пути, которые им необходимо пройти, чтобы встретиться у верхнего, правого (фиг. 1) края А накета /. Концы плеч 26 и 27 снабжены гнездами для зарядки штифтовыми скрепками в нижнем положении плеч. Зарядка гнезда, например, плеча 27 скрепкой 40 с двумя заостренными штифтами, осуществляется путем вдвигания скрепки из наклонного магазина 41 при помощи отсекателя 42, управляемого пальцем цепи 5. Аналогичный магазин со скрепками, штифты которых расположены в шахматном порядке относительно штифтов скрепки 40, имеется с другой стороны автомата и для плеча 26. Когда плечо, например 27, с вложенной ,в его гнездо скрепкой 40, начнет подниматься, то штифты скрепки 40 будут вонзаться в ленту 17, освобождаемую от игл захвата, подни.маемого действием штифта 43 на хвостовик захвата, т. е- произойдет снятие конца ленты штифтами скрепки с матрицы- Аналогичное снятие ленты 17 с матрицы 13 (левой) на штифты левого плеча 26 производится с последующим перерезанием ленты 17, сматываемой с катушки 44. Плечо 26 при положении выше матрицы J3 включает соленоид 45, подпружиненный якорь которого снабжен зубчатой рейкой 46, приводящей при включении соленоида во вращение щестеренку фигурного ножа 47, перерезающего ленту заторможенной на время резки катушки 44 (тормоз не показан). При подъеме плеч 26 и 27 с лентой, они нажимают снизу на матрицы, несколько поворачивая их вокруг осей 48, вследствие чего хвостовики матриц заскакивают за подпружиненные фиксаторы 49, удерживающие матрицы в поднятом положении до в зврата плеч в исходное положение (нижпее), при котором фиксаторы освобождают хвостовики матриц вследствие удара плеч в рычажки 50, опирающие1оя на пятки фиксаторов.
При смыкании плеч 26, и 27 штифты скрепок, вложенных в гнезда плеч, отгибаются в стороны от их длины, соединяя концы ленты впритык. Конечный выключатель 51 выключит электрофрикциопную муфту 25 от
удара iiio нему плеча 27 и включит муфту 30, вследствие чего плечи 26 и 27 возвратятся в И1сходное нижнее положение, а матрицы также займут это положение под действием своего веса.
При отмеривании захватами цепи куска ленты требуемой длины с катушки 44, лента оттягивается вниз роликами 52 двух поводков 53 и 54, проходящими через промежутки между неподвижными роликами 55, 56 и 57. Поводок 53 жестко закреплен на оси его поворота, несущей шестеренку 58, сцепляющуЮ|СЯ с зубчатым сектором 59 звездочки цепи 5.
Поводок 54 поворачивается пальцем 60 ведущей звездочки цепи 5,
Предмет изобретения
1.Автомат для обвязки пакетов и т. п. хлопчатобумажной лентой, концы которой соединяются в каждой обвязке впритык штифтовыми скрепками вдоль края пакета, отличающийся тем, что, с целью упрощения конструкции, он выполнен в виде установленного ниже пакета механизма для отмеривания с рулонов кусков требуемой длины ленты, и парных, по числу обвязок, соосно поворотных противоположно плеч, ось поворота которых проходит примерно через продольную ось пакета, несущих на концах скрепки, снимающие штифтами концы лент с механизма для отмеривания, обводящих ленты вокруг пакета и отгибающих при смыкании в сторону от их длины штифты скрепок, расположенные на плечах в шахматном порядке, пронзившие оба конца лент по линии, параллельной краю пакета.
2.Автомат по п. 1, о тл и ч а ю щи и с я тем, что механизм для отмеривания с рулонов курков необходимой длины ленты выполнен в виде бесконечной цепи с реверсивным приводом, снаб женной игольчатым захватом для конца ленты и вторым игольчатым захватом для фиксации
.ленты перед отрезанием ее от рулона соответствующим ножом, включаемым от пальца цепи.
3.Автомат по п. 1, отличающийся тем, что для зарядки концов плеч штифтовыми скрепками в пижнем положении плеч применены управляемые от пальцев цепи-отсекатели, вдвигающие скрепки на концы плеч из наклонных магазинов для (Скрепок. L/ c
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для обвязки пакетов, тюков, кип и т.п. проволокой | 1958 |
|
SU123447A1 |
| АВТОМАТ ДЛЯ ФОРМОВКИ КОЛБАСНЫХ ИЗДЕЛИЙ | 1973 |
|
SU367837A1 |
| Устройство для упаковки продуктов в полимерные пакеты | 1978 |
|
SU734066A1 |
| Автомат для наматывания в рулон полотна заданной длины | 1973 |
|
SU525605A1 |
| Автомат для получения рулонов полотна заданной длины | 1975 |
|
SU716954A1 |
| Автомат для изготовления скрепок | 1986 |
|
SU1379000A1 |
| Устройство для образования и наложения скрепок на пакет | 1985 |
|
SU1321639A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Устройство для наложения скрепок на заполненный пакет | 1984 |
|
SU1310297A1 |
| АППАРАТ ДЛЯ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 1994 |
|
RU2071730C1 |