Изобретение отноеится к горной ленности и может быть иснользонано и .лек- тромагинтних перф()|)аторах, предназначенных д.ли бурения iHiiypoii и скважнн в но- родах дюбой креноети.
11,е,тью изобретения яв 1яется стаби.лиза- ция работы ударного уз, электромагнитного перфоратора, установленного на нодат- чике, расширение его (|)ункниоиа;1Ы(1)1х возможностей, новышенне надежности н :)нер- гии удара.
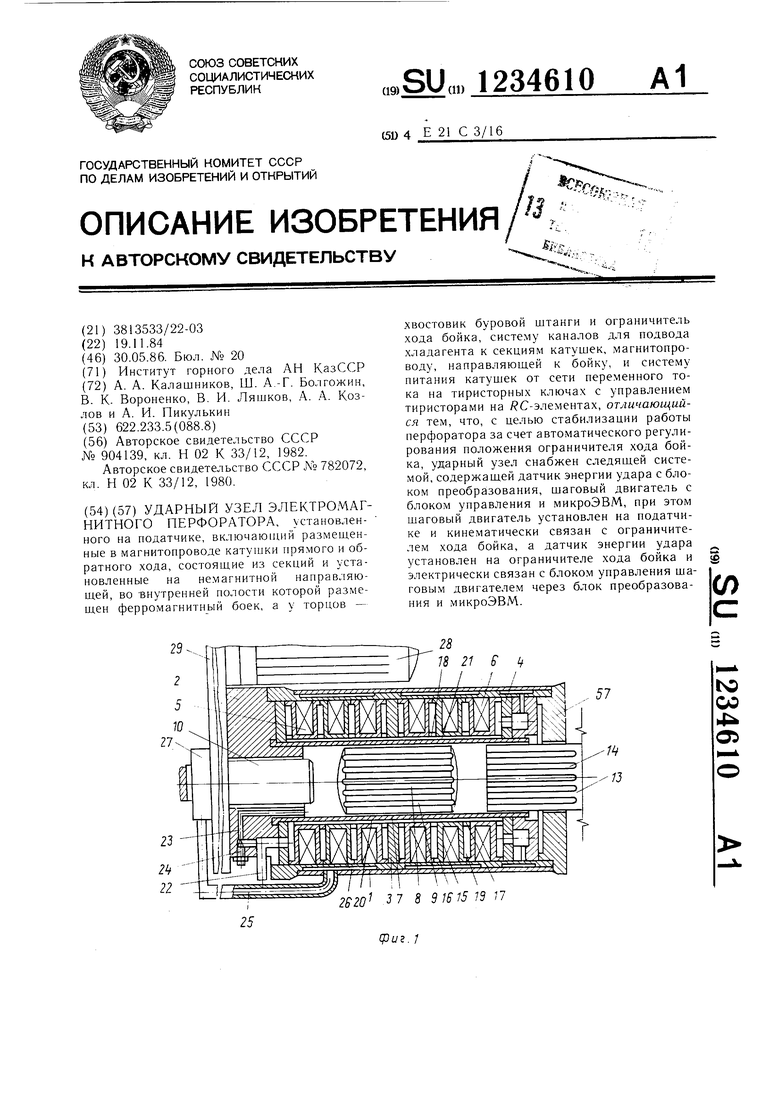
Па фиг. 1 изображен электромагнитный нерфоратор с преддагаемы.м ударным узлом, нродольный разрез; на фи1 . 2установка перфоратора на нодатчике; на фиг. 3 сечение А- А на фиг. 2; на фи1 . 4 сечение Б- Б на фиг. 2; на фиг. о схема питания ударпо1 О узла электрома1 нитно1-( перфоратора; на . 6 блок-схема с, дящей системы ограничителя хода бойка; па фиг. 7 - блок-схема алгоритма работы микроэвм.
Ударный узе.-i электромагнитного перфоратора (фиг. 1 - 4) содержит .магнитопро- вод, состояни1Й из ярма 1 с двойными стенками (корпуса), переднего 2, среднего 3 и заднего 4 нолюсов, катушки прямого 5 и обрат1101Ч) б хода, каждая из кото)5гх состоит из секний. Катушки нрямого Г) и обратного хода 6 установлены на немагнитной направляюн1ей 7, во 1 нутренней но- лоети которой распо, ферромагТ1итн1 п 1 боек 8 с продольными пазами 9 на его боковой поверхности, Е заимодейетвук)Н1ий с хвостовиком 10 буровой пп анги 1 и ог)а- пичителем хода 12 бойка 8. Хвоетолпк 10 и ограпичитель 12 хода размеидены с )аз- НЕ)ГХ сторон направляющей 7. Ограничите,ni) 12 хода имеет с ьемную пи.линдрическук) часть 13, на боковой поверхности которой имеются продольные пазы 14.
Посредством назов 9 и 14 |}нут 1енняя полость направляющей 7 сообщается с атмосферой. (Система каналов для подвода х,1ад- агента охватывает все секний катушек о и 6, ярмо 1, персд.пий 2, ередний 3 и задний 4 полюсы, нанрав;1яюп1ук) 7 и боек 8.
ка 1 у1иек 5 6 размешены в каркасах 15, KOTOpi ie имею - ф;|анць1 16. ны- полне1И{ые из немагни iTior j материа.ча (не- маг 1итной стали), а сами ьаркасы 15 выполнены путем нанесения нп новерхност фланцев 16 слои 1г-и).-1яци11. И;мпжиые тор- цов1яе понерхност.и фланцев 6 соединены герметично, а внч тренние с образованием pai нре.телепных но окр Кности но. юсгей 17 и 18. (л)ед|1нен1П11е ка.анпым об)о .1анны I ti o6) тс п.лообменники в ви. к о. i.ueiu,i. но. юсген И). | O;IOCTH 17 i: i | |пи1К)гся с (iiioii стороны с по, :еп;10обменнико15, с другой с:-(.))оны но- ос ги 7 сообн1аются с нодводи ни ; ко.ч.юл торо.ч 20, а но.лостн 18. ) ri ; ;isii i им
KO.T iCK KJpOM 21. В i:i:,i:occ 2 выно, пепы капа;1Ы 22 и 2.3. Ka.ia. i 22 идгпш5
0
0
0
5
0
.лически соеди иг . н;5по)нук магистраль (не показана) с .;одяи1им кол,:|ектором 20, а кана,1 23 и ;;:.шчески соединяет внутреннюю по.юс, ман)авляюн1ей 7 с каналом 22.
Л)оссе. 24 регулируется нодача хлад- ai-епта во iiHyrpeiHiKMo но;1ость паправляю- Н1ей 7. Гн.;1:1опривод 25 соединяет по.;1ость 2() .между двойными стенками ярма 1 с муфт()й 27 б( н|К)мывки.
В)ан1.епие бх ровой Н1танги 11, сЕ Язанной с хв(к тов1 ком 10, осуществляется поворотным механи:,мом, состоянгим из электродвигателя 28 с pe.rsKTopoM 29.
Уеилие буровой Н1тап1 и I 1 на забой обеснечиваетс-я винтовым податчиком, состояпиш ,11, 1яюп,ей рамы 30, винта 31 нодачи, электродвигателя 32 с редуктором 33. ;V oi-yT бы |Ь испо;1ь.и)ваны и другие тины п().1а 1 иког;: пневматические, гидра ;- , 1ическне н .
Kai-yiiiKH Г) и () (:миг. 5) питаются от се |-и п(мн ,.:c f Hoi-o тока чс рез тириеторы 34 и 35 СО;/ ветствепно. Унрав.чепие тиристо- )(м выпо. на резисгоре 36, конденсаторе 37 и диодах 38 и 39, а н(давление 1Д1 ни-и;ром 35 на резисторе 40, кондеп- caT(j)i 41 и диодах 42 и 43.
Огра.чичите,) 12 хода бойка 8 енабжен с. к дяшсй системой, содержан1ей (фиг. 6) да7-ч1 К -14 энергии удара, сигпа.1 котс.)р(Л о n)OHopiU ;iiia.ieH эпе) ии дара боГ|ка, б;;ок 45 н|)1Ч)б)аювания сигна,1а д;ггчика 44, nia- говьп дви. атель 46. б.лок 47 унрав, 1с ния HiaroBbiM дви -ателем 46 и . .
Датчик 14 ycTaiioB/ien (фиг. 2) пс к.)- гредственно на )аничнтеле 12 хода бои ка 8 и и)едстав,тяет собой серийный ньезоэ, 1ект- ричес кий датчик аксе.лерометр, нанри.мер, тина 11И93-1, 11И93-4 и т. д.
Б, 1ок 45 пре{)бразо11ания си|д1а. 1а датчи- а 14 состоит из диода 49, накоците. 1ЫЮ1 О К(.1.чдсч1сато|)а 50 i- подк, 1К)ченным нара;|- /кмьио этому ко1гтепсатору разрядиьгм резис- .)м 51 и ана. ого-пи(()рово|-о преобразователя (АЦП) 52.
Датчик 44 через 49 свя.чан с на- коните. 11)1Н)Гм конденсатором 50, котор(з1Й нод- ключе.ч к аналого1«)му 1;ход ана. юго-цифро- вого н)еобразовате;1я 52, выход которого подсоединеи к кана.лу микроЭВД 48, связанному с )|м дв1П ате.ле.м 46 че)ез блок 47 у11ра15.лепия ниц-овым дви1 алч лем 46.
Уда)Н1)1Й узе,л э:1ект юма1 питп(.1го перфоратора и шаг оиый д.вигате.ль 4ti жестко закрен.лепы .на и.лите 53, а (грапичитель 12 хода (фи|-. 4) устано15::еи на п.. 1ите 53 с во.зможиостыо 11е)е.ме1цения но ней. При этом С1)е.мная часть 13 ограничителя 12 хода входил в нанрав;|яюн1ую 7. Илнта 53 при |ф; Н1епни ( 31 нодачи пе)емеп1аетея по раме 30. 111а1 О И)1Й двигатель 46 (фи1 2, 3) кинематичесчхи связан с о1 раничите,ле.м 12 ло.та н)и НОМ01ПИ червяка 54, червячного ко,леса 55 с внул-рен.ней рез1,бои и винта 56. Винл ;)() л естко связан с (гра.чичите;|ем 12 хода. y. iapHbni узе,л зак)ыл к)|)Пнкой 57.
В качестве охлаждающего агента используется вода. Боек 8, хвостовик 10 и съемная часть 13 ограничителя 12 хода закалены. Цепи электропитания двигателей 28, 32 и 46 не показаны.
Ударный узел электромагнитного перфоратора работает следующим образом.
Вода из напорной магистрали через канал 22 поступает в подводящий коллектор 20, а затем через полости 17 пода44, импульсы которого через диод 49 заряжают конденсатор 50. Напряжение на конденсаторе 50 соответствует средней энергии ударов бойка 8 по ограничителю 12 хода. Микроэвм 48 с помощью АЦП 52 периодически, т. е. через равные промежутки времени, определяемые временем отработки ща- говым двигателем 46 заданного числа щагов, производит измерение напряжения на конденсаторе 50 и выдает сигналы на управлеется одновременно во все кольцевые полости Ю ние щаговым двигателем 46.
19 теплообменников. Из теплообменников во-Последний получает вращение в ту стода через полости 18 поступает в отводя-рону, при вращении в которую напряжещий коллектор 21, а из него - в полость 26
между двойными стенками ярма 1, охлаждает это яр.мо I и выводится по гидроние на конденсаторе увеличивается и соответственно увеличивается энергия ударов бойка 8 по ограничителю 12 хода, а значит -
проводу 25 в муфту 27 боковой промывки по хвостовику 10. Серия ударов бойка 8 оп- и далее на промывку щпура.ределяется числом его ударов по ограничиОдновременно вода из канала 22 поступа- телю 12 хода за время отработки шаговым ет в канал 23 и далее - во внутрен- двигателем заданного числа щагов. нюю полость направляющей 7. Боек 8, совер-При повыщении (понижении) напряжещающий возвратно-поступательное движе- 2о питающей сети электромагнитная сила ние, разбрызгивает эту воду, превращая ее в водяной туман, который проходит через продольные пазы 9 бойка 8, продольные пазы 14 съемной части 13 ограничителя 12 хода и выходит в атмосферу. При этом происходит охлаждение и смазка соударяющих- 25 раничителя 12 хода (фиг. 1, 2) путем пе- ся и трущихся деталей, т. е. бойка 8, хвое-ремещения последнего вправо (влево) до тех
товика 10, съемной части 13 ограничителя 12 хода. Расход воды на охлаждение и смазку регулируется дросселем 24.
тяги катущек 5 и 6 увеличивается (умень- щается). Шаговый двигатель 46 под управлением микроэвм 48 увеличивает (уменьща- ет) ход бойка 8, т. е. расстояние между хвостовиком 10 и съемной частью 13 огпор, пока A/-I-1-А, (фиг. 7), где А,- - двоичное число, пропорциональное напряжению на конденсаторе 50 до отработки щаговым двигателем 46 п щагов; Л,-+1 .- двоВозвратно-поступательное движение бой- 0 ичное число, пропорциональное напряжению ка 8 осуществляется под действием импуль- на конденсаторе 50 после отработки щаго- сов тока, попеременно подаваемых в катушки прямого 5 и обратного 6 хода. Происходит это следующим образом. При положительной полуволне переменного тока (фиг. 5) происходит отпирание тиристора 34, а при от- рицательной полуволне - тиристора 35. Отпирание тиристоров 34 и 35 происходит током разряда конденсаторов 37 и 41 соответственно через соответствующие диоды
39 и 43. Изменение угла управления ти- до ограничителя .12 хода. IB предлагаемом удар- ристоров 34 и 35, т. е. регулирование ном узле величина перемещения ограничите- напряжения на катушках 5 и 6, произво- ля 12 хода за п щагов, отрабатываемых дится изменением величины сопротивления шаговым двигателем 46, выбрана около 1 мм. резисторов 36 и 40 соответственно. ДиодыАналогично работает следящая система
38 и 42 необходимы для получения дна- при колебании частоты питающей сети при пазона изменения угла управления тиристо- 45 регулировании энергии ударов путем изме- ров 34 и 35, больщего 90°. После подачи нения напряжения на катушках 5 и 6, а
вым двигателем п шагов. При этом i принимает значения / 1,2,3..,К,К-+-1,... в соответствии с номером цикла работы следящей системы.
Величина перемещения ограничителя 12 хода за п щагов, отрабатываемых щаговым двигателем 46, выбирается в зависимости от общего диапазона перемещения (амплитуды смешения в одну и другую стороны)
питания на катушки 5 и 6 ударного узла производится пуск микроэвм 48 (фиг. 6) в соответствии с алгоритмом, представленным на фиг. 7.
50
также под воздействием других факторов (изменение сил сопротивления движению бойка, электродинамических сил, температуры катущек, физико-механических свойств
Боек 8 при ударе по ограничителю 12 горных пород и т. д.) дестабилизирующих хода возбуждает пьезоэлектрический датчик работу ударного узла.
44, импульсы которого через диод 49 заряжают конденсатор 50. Напряжение на конденсаторе 50 соответствует средней энергии ударов бойка 8 по ограничителю 12 хода. Микроэвм 48 с помощью АЦП 52 периодически, т. е. через равные промежутки времени, определяемые временем отработки ща- говым двигателем 46 заданного числа щагов, производит измерение напряжения на конденсаторе 50 и выдает сигналы на управле ние щаговым двигателем 46.
питающей сети электромагнитная сила раничителя 12 хода (фиг. 1, 2) путем пе- ремещения последнего вправо (влево) до тех
тяги катущек 5 и 6 увеличивается (умень- щается). Шаговый двигатель 46 под управлением микроэвм 48 увеличивает (уменьща- ет) ход бойка 8, т. е. расстояние между хвостовиком 10 и съемной частью 13 огичное число, пропорциональное напряжению на конденсаторе 50 после отработки щаго-
ограничителя .12 хода. IB предлагаемом удар- ном узле величина перемещения ограничите- ля 12 хода за п щагов, отрабатываемых шаговым двигателем 46, выбрана около 1 мм. Аналогично работает следящая система
вым двигателем п шагов. При этом i принимает значения / 1,2,3..,К,К-+-1,... в соответствии с номером цикла работы следящей системы.
Величина перемещения ограничителя 12 хода за п щагов, отрабатываемых щаговым двигателем 46, выбирается в зависимости от общего диапазона перемещения (амплитуды смешения в одну и другую стороны)
также под воздействием других факторов (изменение сил сопротивления движению бойка, электродинамических сил, температуры катущек, физико-механических свойств
горных пород и т. д.) дестабилизирующих работу ударного узла.
5V
Сриг. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Ударный узел электромагнитного перфоратора | 1987 |
|
SU1469117A2 |
| Ударный узел электромагнитного перфоратора | 1984 |
|
SU1167314A1 |
| Ударный узел электромагнитного перфоратора | 1989 |
|
SU1707194A1 |
| Ударный узел электромагнитного перфоратора | 1990 |
|
SU1700226A1 |
| Ударный узел электромагнитного перфоратора | 1985 |
|
SU1273534A1 |
| Стенд для исследования нагруженности деталей ударно-вращательного механизма | 1984 |
|
SU1165558A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Электромагнитный привод ударного действия | 1987 |
|
SU1495947A1 |
| Электромагнитный двигатель возвратно-поступательного движения | 1983 |
|
SU1134992A1 |



5S
53 3D
3/
Cpus. 3
фуе.
36
37
l-rнc5 f . f IM
35
фиг. 5
Cpu.S
Измерение А i
Отрс 5отка шаговым двигателем п шаги& 8пра8о
Измерение AI+J
да
Нет
Измерение AI
OGpaSomi o двигателем п uuazoS 8ле8о
Измерение Ai +j
Фц.7
ВНИИПИ Государственного комитета С(ХР
по делам изобретений и открытий
113035, Москва. Ж -35, Раушская наб., д. 4;5
Филиал Г1ГИ1 «Патент, г Ужгород, ул. Проектная. 4
| Электромагнитный двигатель возвратно-поступательного движения | 1976 |
|
SU904139A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный двигатель возвратно-поступательного движения | 1978 |
|
SU782072A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
