Изобретение относится к машиностроению, а именно к кривошипно-шатунным преобразователям движения, и может быть применено, в частности, в станках-автоматах, роботах и манипуляторах.
Цель изобретения - расширение кинематических возможностей механизма, что позволит расширить зону обслуживания и количество операций робота или манипулятора.
от точки Bi до точки В2 ползун 9 под воздействием шатуна 13 перемеш.ается в направляющих 8 опоры 7, в результате чего захват 10 подтягивается к опоре 7. Затем убирается выдвижной упор 5 и при повороте кривошипа 12 от точки В2 до точки Вз опора 7 поворачивается от упора 4 к упору 3 при неподвижных относительно нее ползуне 9 и захват& 10.
После контакта опоры 7 и с упором 1
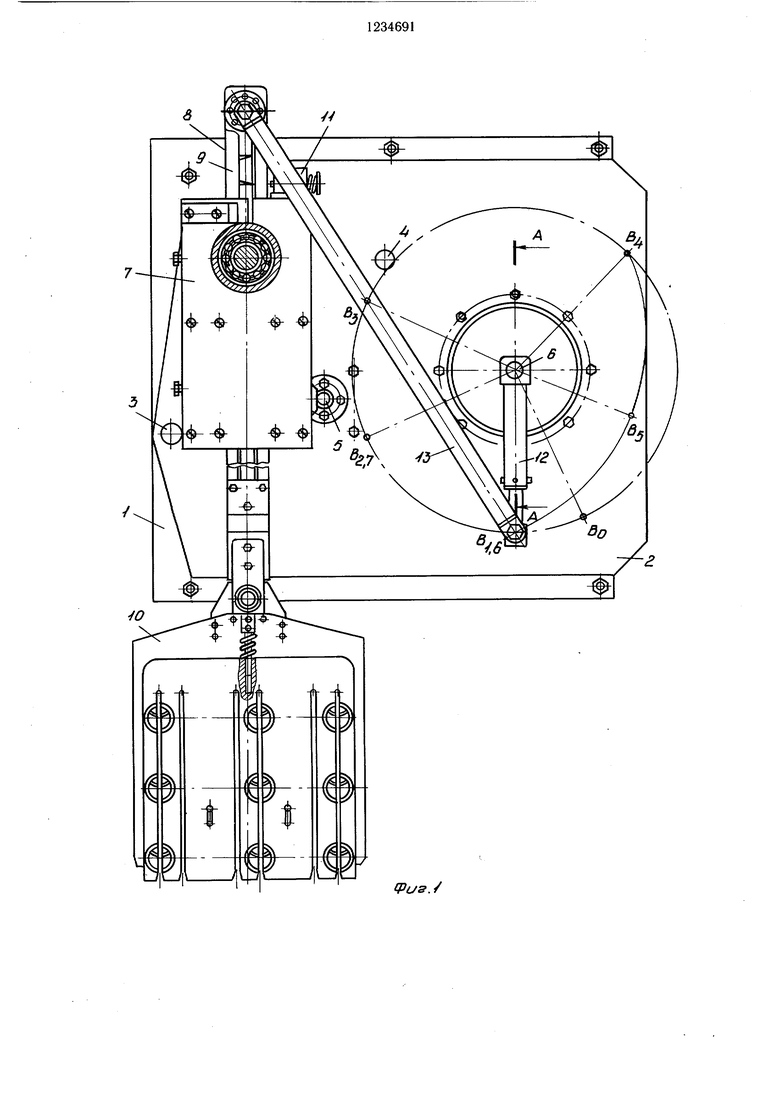
На фиг. 1 показана схема механизма; Ю упор 5 снова выдвигается, фиксируя опор на фиг. 2 - разрез А-А на фиг. 1.7 в этом положении. При повороте кривошипа 12 от точки Вз до точки В4 захват 10
20
25
Механизм содержит основание 1, корпус 2 с установленными на нем неподвижными упорами 3 и 4 и выдвижным упором 5, и ве- душий вал 6. На корпусе 2 установлена вра- шательная опора 7, в которой выполнены прямолинейные налравляюшие 8. В направля- юш,их 8 с возможностью фиксированного возвратно-поступательного перемещения размещен ползун 9, с которым жестко связан рабочий орган в виде, например, захвата 10, а на корпусе 2 установлен фиксатор 11 ползуна 9.
С ведущим валом 6 жестко связан упругий кривошип 12, который через щатун 13 шарнирно связан с ползуном 9. Корпус 2 размещен на основании 1 с возможностью фиксированного поворота вокруг опоры вала 6, например, на подшипниках 14 качения, а на основании 1 установлен фиксатор 15 положения корпуса 2. На другом конце вала 6 жестко закреплено зубчатое колесо 16, взаимодействующее с зубчатым колесом 17 привода механизма (не показан).
Механизм работает следующим образом.
В исходном положении кривошип 12 находится в положении Во, а опора 7 замкнута между неподвижным упором 4 и выдвижным упором 5. Захват 10 выдвинут из опоры 7 в крайнее положение. Фиксатор 11 выключен, а фиксатор 15 включен. Получая вращение от привода через зубчатые колеса 17 и 16, вал 6 поворачивает упругий кривошип 12 из положения Во в положение В. При этом длина кривошипа 12 сокращается, за счет чего ползун 9 и захват 10 остаются неподвижными, т.е. ведомое звено имеет выстой.
После сокращения кривошипа 12 до его
35
40
вьщвигается из опоры 7 до крайнего положения. При дальнейщем повороте кривошипа 12 от точки В4 до точки BS последний увеличивает свою длину за счет чего ведомое звено имеет второй выстой.
При повороте кривошипа 12 от точки BS до точки Вб захват 10 опять подтягивается к опоре 7, эсле чего упор 5 убирается. При поворо. - ;11ивошипа 12 от точки Be к точке В опора 7 вместе с захватом 10 поворачивается от упора 3 к упору 4. Затем упор 5 снова выдвигается, фиксируя опору 7 в этом положении и при повороте кривошипа 12 от точки В- к точке В захват 10 выдвигаетнаименьшей длины при дальнейшем повороте 45 хвата 10.
ся из опоры 7 в крайнее положение. Механизм приходит в исходное положение. Таким образом захват 10 совершает полный цикл рабочий движений за два оборота кривошипа 12. Положение точек траектории движения кривошипа 12 и соответственно траектории захвата 10 относительно основания 1 производится путем включения фиксатора 11, затормаживающего ползун 9, и выключения фиксатора 15, выполненного, например, фрикционным, который освобождает корпус 2. В этом случае вращающий момент от вала 6 передается непосредственно на корпус 2, который совершает поворот вокруг вала 6 вместе с опорой 7 и захватом 10. После поворота корпуса 2 на заданный угол включают фиксатор 15, закрепляя корпус 2 в новом положении, и работа механизма продолжается с вышеописанном порядке, а фиксатор 11 выключают. Поворот корпуса 2 можно осуществлять в любой фазе цикла рабочих движений заот точки Bi до точки В2 ползун 9 под воздействием шатуна 13 перемеш.ается в направляющих 8 опоры 7, в результате чего захват 10 подтягивается к опоре 7. Затем убирается выдвижной упор 5 и при повороте кривошипа 12 от точки В2 до точки Вз опора 7 поворачивается от упора 4 к упору 3 при неподвижных относительно нее ползуне 9 и захват& 10.
После контакта опоры 7 и с упором 1
0
5
5
0
вьщвигается из опоры 7 до крайнего положения. При дальнейщем повороте кривошипа 12 от точки В4 до точки BS последний увеличивает свою длину за счет чего ведомое звено имеет второй выстой.
При повороте кривошипа 12 от точки BS до точки Вб захват 10 опять подтягивается к опоре 7, эсле чего упор 5 убирается. При поворо. - ;11ивошипа 12 от точки Be к точке В опора 7 вместе с захватом 10 поворачивается от упора 3 к упору 4. Затем упор 5 снова выдвигается, фиксируя опору 7 в этом положении и при повороте кривошипа 12 от точки В- к точке В захват 10 выдвигает5 хвата 10.
ся из опоры 7 в крайнее положение. Механизм приходит в исходное положение. Таким образом захват 10 совершает полный цикл рабочий движений за два оборота кривошипа 12. Положение точек траектории движения кривошипа 12 и соответственно траектории захвата 10 относительно основания 1 производится путем включения фиксатора 11, затормаживающего ползун 9, и выключения фиксатора 15, выполненного, например, фрикционным, который освобождает корпус 2. В этом случае вращающий момент от вала 6 передается непосредственно на корпус 2, который совершает поворот вокруг вала 6 вместе с опорой 7 и захватом 10. После поворота корпуса 2 на заданный угол включают фиксатор 15, закрепляя корпус 2 в новом положении, и работа механизма продолжается с вышеописанном порядке, а фиксатор 11 выключают. Поворот корпуса 2 можно осуществлять в любой фазе цикла рабочих движений заtPu8.
г
/
j y CyxSSNS SX
, f . Л k f kKxvvxxxxvxxvs:
17
А-А
6
У4
fPus.2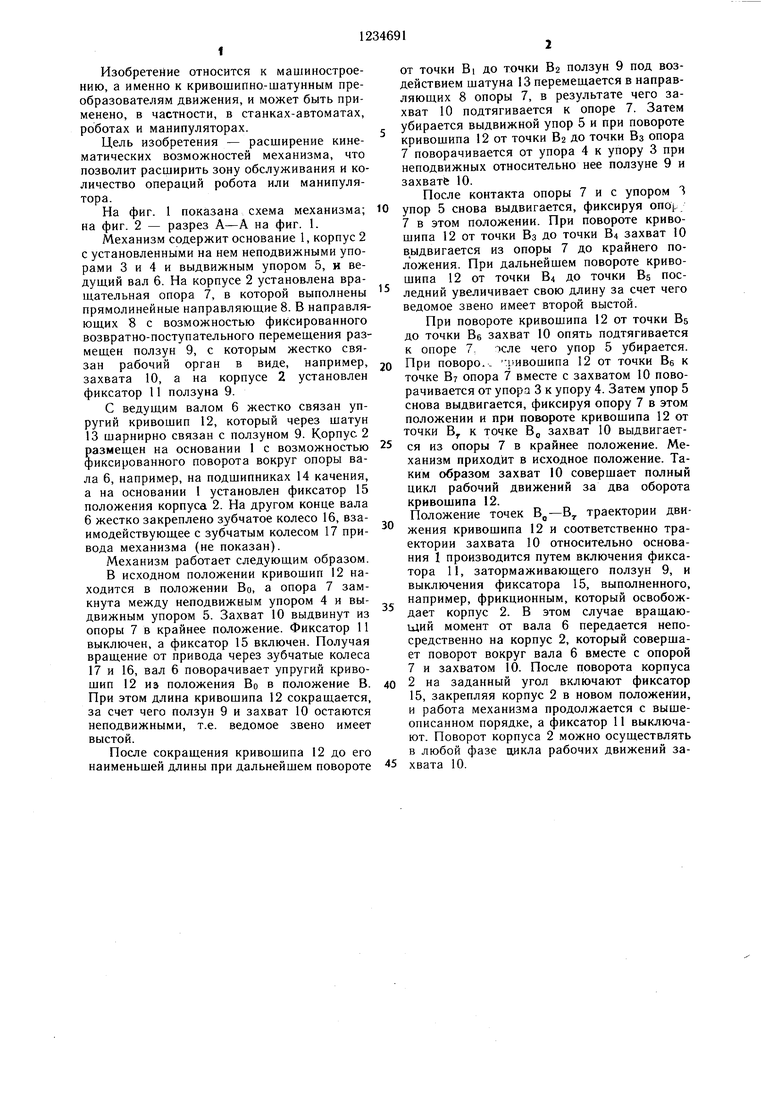
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный направляющий механизм с переменной длиной звена | 1990 |
|
SU1783201A1 |
| Механизм газораспределения двигателя внутреннего сгорания с регулируемыми фазами | 1987 |
|
SU1574872A1 |
| Устройство для укладки предметов в тару | 1990 |
|
SU1724520A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2151087C1 |
| Устройство для непрерывной намотки текстильных паковок | 1989 |
|
SU1715702A1 |
| Исполнительный механизм кривошипного пресса | 1987 |
|
SU1498625A1 |
| Устройство для передачи отливок | 1988 |
|
SU1643351A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| Полуавтоматический станок для многоплоскостной гибки труб | 1972 |
|
SU548336A1 |
| Четырехзвенный рычажный механизм | 1982 |
|
SU1048202A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
