1
Р1зобретенпе относится к области обработки металлов давлением, в частности к станкам для гибки труб.
Известен станок, содержащий станину с расположенными на ней кареткой продольной подачи и гибочным механизмом, включающим приводной вал с кривои1ииом, несущий гибочный шаблон и поворотный кронштейн с зажимным башмаком.
Недостаток станка состоит в том, что он не обеспечивает удобств съема согнутой трубы с гнбочпого шаблона, вследствие захвата ее зажимным башмаком при обратном ходе иоворотного кронштейна, что приводит к порче согнутой трубы н затрудняет автоматизацию процесса гибки.
Целью изобретеиия является повышение качества гибки.
Эта цель достигается тем, что ползун снабжен обоймой с гнбочными роликами, а новоротный кронштейн - регулируемым упором для ограничения хода ползуна.
На фиг. 1 показап станок, общий вид; на фпг. 2 - разрез по осп вала гибочного механизма; на фиг. 3 - вид по стрелке А па фиг. 1 до гибки трубы; на фиг. 4 - то же после гибки трубы.
На станине 1 станка установлена каретка 2 продольной подачи, снабженная механизмом 3 зажима ч механизмом 4 поворота трубы. В
головной части станины смонтирован гибочный механизм 5. На станине станка установлен рольганг 6 для базирования трубы п выдвил-сной упор 7 для ограничення ее иеремещения. Гибочный механизм 5 включает в себя установленный на подшипниках вертикальный вал 8, на котором между опорамн смонтирована звездочка 9 цеииой передачи, соединеиная цепью со штоком гидроцплиндра 10. Втулка звездочки 9 имеет кривоппш 11, который серьгой 12 соедпиен с иолзуном 13, несущим обойму 14 с гибочными роликами 15. Ползун 13 установлен в иаправляющнх новоротного кронштейна 16, оснан1енного регулируемым упором 17 для ограиичеиия хода иолзуиа 13. Поворотный крошптейн 1G л естко соединен с верхней частью вертикального вала 8. В нижней части вертикального вала установлен дисковый то)моз (не иоказап). Гибочный механизм 5 снабжен также зажимным башмаком 18, посредством которого труба прижимается к прямолниейиому участку гибочпого и аблона 19.
Станок работает следуюии1м образом.
Трубная заготовка автоматически подается из бу :ксриого загрузочиого устройства (ие ноказано) и укладывается на рольганг 6. Одновременно включается иривод иеремеи ения каретки 2, которая двигаясь по станине 1 досылает трубу до выдвижного упора 7. После соприкосновения переднего торца трубы с выдвижным уиором 7 при дальнейшем движении каретки труба заходит в механизм 3 зажима и закрепляется. Одновременно с этим прекращается перемещение каретки.
После зажима трубы в механизме 3 выдвижной упор 7 убирается и каретка 2 снова иачииает перемещаться, вводя трубу между зажимным бащмаком 18 и гибочными роликами 15 с одной стороны и гибочным шаблоном с другой в ручей последнего. При достижении Заданного пути перемещения каретка 2 останавливается и труба прижимается зажимным бащмаком 18 к гибочному щаблону 19. Включается гидроцилиндр 10.
В начальный момент поворота звездочки 9 кривошип 11 посредством серьги 12 перемещает ползун 13 и подводит гибочные ролики 15 к трубе 4, а ползун 13 - до соирикосиовения с упором 17. Одновременно с этим вертикальный вал 8 удерживается от поворота специальным тормозом. После соприкосновения ползуна 13 с упором 17 кривошип 11 начинает поворачивать вал 8 вместе с поворотным кроищтейном 16 и установленными на нем гибочными роликами. При этом гибочные ролики, обкатывая трубу, изгибают ее на заданный угол.
По окончании гибки гидроцилиндр 10 включается на обратный ход. В начале обратного
хода кривошип И через серьгу 12 отводит от согнутой трубы ползун 13 с гибочными роликами 15. При этом вертикальный вал 8 удерживается от вращения тормозом. После отхода ползуна с гибочными роликами от трубы кривошип 11 и серьга 12 возвращают поворотный кронштейн 16 в исходное положение. Труба освобождается от зажимов башмаком 18 и механизма 3 картеки 2 и удаляется из станка.
Формула изобретения
Полуавтоматический станок для многоплоскостной гибки труб, содержаший станину с расположенными на ней кареткой продольной подачи и гибочным механизмом, включающим приводной вал с кривощипом, несущий гибочный шаблон и поворотный кронштейн с установленным на нем ползуном, шарнирно связанным с кривошипом, отличающийся тем, что, с целью повышения качества гибки, ползун снабжен обоймой с гибочными роликами, а поворотный кронштейн - регулируемым упором для ограничения хода ползуна.
Источники информации, принятые во внимание при экспертизе: 1. Авт. св. № 97455, кл. В 21D 7/02, 1949.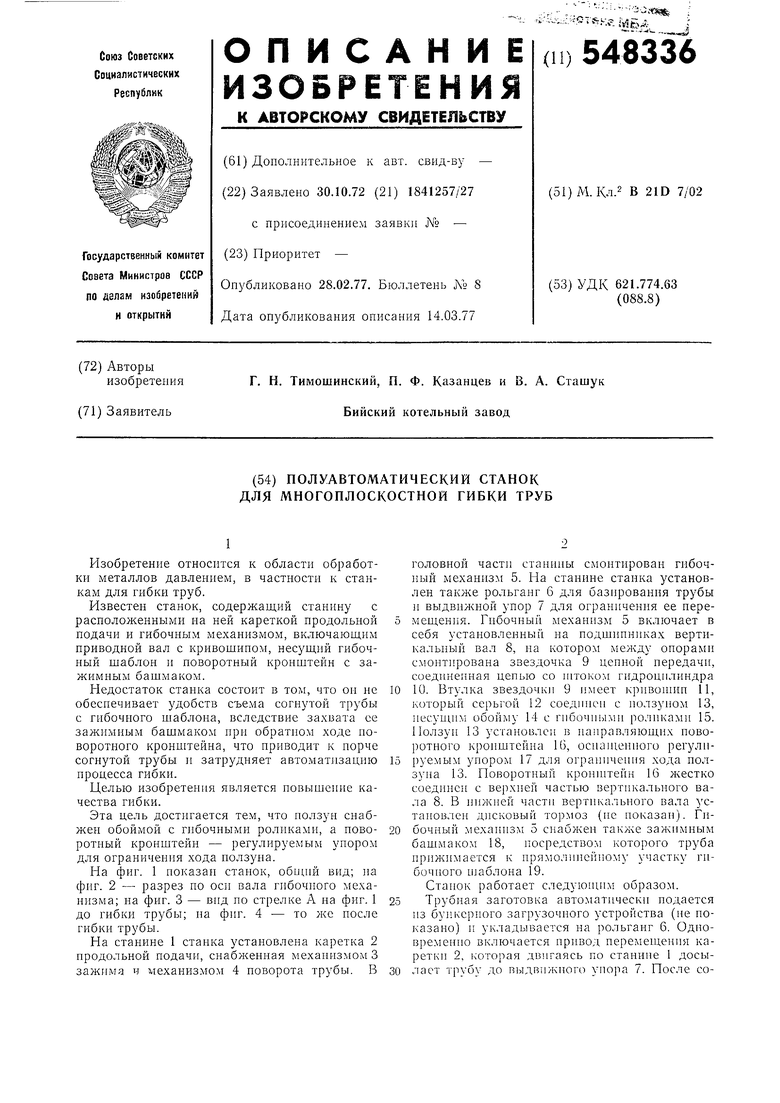

| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Трубогибочный станок | 1979 |
|
SU837471A1 |
| Трубогибочный станок | 1981 |
|
SU1030064A2 |
| Гибочный механизм трубогибочного станка | 1976 |
|
SU770607A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
| Трубогибочный станок | 1977 |
|
SU627885A1 |
| Устройство для изготовления змеевиков | 1982 |
|
SU1160041A1 |
| Станок для двухсторонней гибки труб | 1973 |
|
SU501802A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |

/ ;.-, fP
13
