Изобретение относится к автоматике и вычислительной технике и может быть использовано для тренировки вестибулярного аннарата.
Целью изобретения является гювьиление точности устройства.
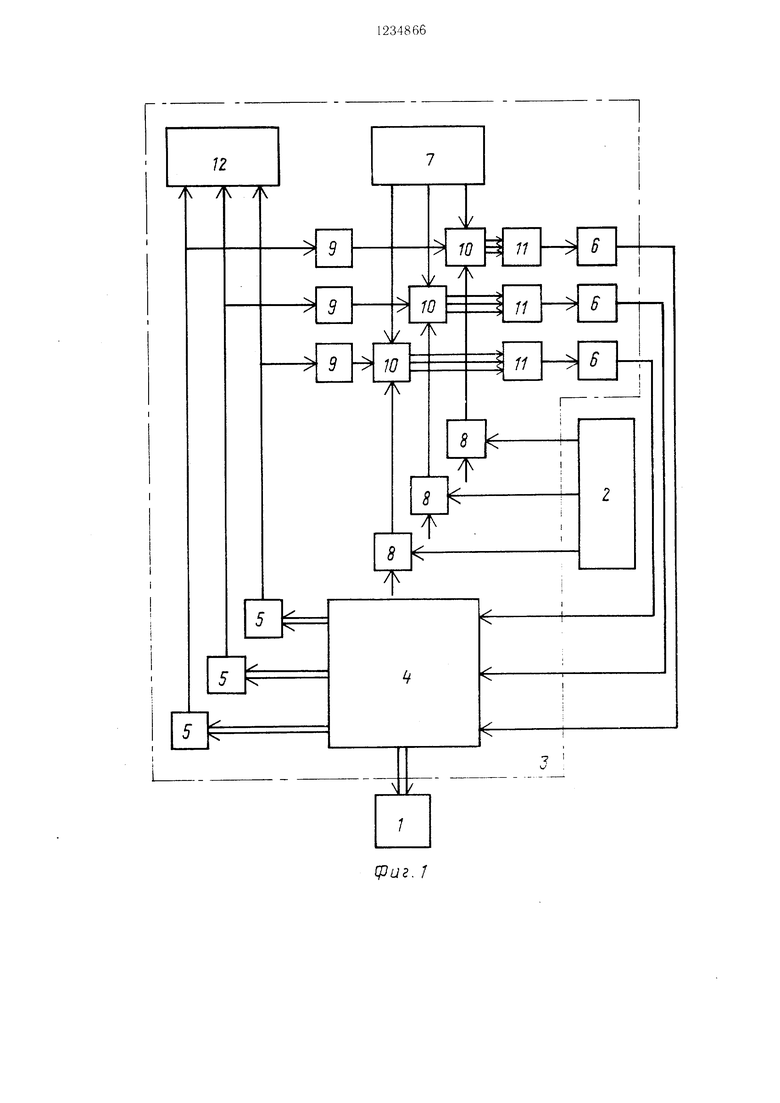
На фиг.1 представлена структурная схема устройства; на фиг.2 -- схема узл-а смешения рабочего места оператора.
Устройство содержит рабочее место 1 оператора с уз.:1ом 2 ручного управления, блок 3 моде,лировапия возмущающих воздействий, содержан1,ий узел 4 смен1ения рабочего места оиератора, датчики 5 у| ловых координат, уси. 1ите;1и 6 мощности, генератор 7, уси:1ите- , 1и 8 с регулируемым коэффициентом уси- jieiniH, инверторы 9, коммутаторы 10, сумматоры 11 и блок 12 регистрании.
Узе;1 4 содержит кольца 13- -15 карданова подвеса и оноры 16 19, при этом опора 16 жестко соединена с внутренним ко:1ьном 14 карданова нодвеса и coBMCHieiia с опорами 17 и 18, а опоры 17,18 и 19 вынолне1Пз1 с возможностью смепгения дру1 относительно друга вдо;1ь одной оси.
Устройство работает следующим образом.
Оператор юмещается в рабочее место (кресло) 1, в котором он фиксируется ремнями. При noMonui опор 17-19 производится смеи1еппе кресла 1 вместе с оператором в кольце 14 карданова подвеса с пе.:1ью статической балапсировки всего подвеса вместе с оператором так, чтобы они занимал1Н в npocTpancTiic состояние безразличного равновесия. Для иск почительного лияния зрительного анализатора на оненку онератором угловых Г1ере 1еп1е11ий ему можно надеть све- тоиенронинаемую новязку. Оиератору сооб- П1ают инструкнию: при номопш узла 2 руч- иого уиравлеиия сохранять cisoe угловое но- , 1ожепие в пространстве неизменным. В нро- пессе обучения оператора коммутаторы 10 подк;1Ючают к сум.маторам 1 1 одновременно три вида сигна. юв: сигналы с унравляемо о генератора 7, сигналы узла 2 ручного унрав. 1е1П-1я и через инверторы 9 сигпа:1ы датчиков о У1МОВЫХ коордипат, причем но- с„чедпие своим подключением образуют трех- коордипатную следянлую снстему углового но,чожеппя исиытуемого в пространстве но трем независимым угчлам поворота ((:, эе., например углам Эйлера. В этом с.пучае сле- дяигая система устанавливает кресло испытуемого в пространстве так, чтоб1 1 ег о lio- ложение, задаваемое уг.лами ((, | , . coii- надало бы с угловым положением, задаваемым сигналами с генератора 7. Оператор, неременхая ручку уз, 1а 2, дог10.:1пите. 1ь- по передает сигна, , 1епия на однн сумматор 11, тем самым незначительно смс- ншя точку стационарного состояния следя- :ней сиетем в ту n:ni иную еторону, что
соответствует пространственным угловым перемещениям кресла относительно некоторого I JioBoi o стационарного положения в пространстве, задаваемого углами (р, , у,. rioc,ie получения онератором необходимых навыков управления своим еобствен- injiM угловым положением при по.мощи узла 2, контур следящей системы подключается коммутаторами 10 лии1Ь для начальной угловой установки рабочего места в пространстве,
носле чего связь одного, двух или всех датчиков 5 с сумматорами 11 прерывается коммутаторами 10 и далее отклонение углового ноложения рабочего .места 1 от перво- нача;1ьного (по тем углам поворота, где от- к. почены датчики 5) всецело определяется сигпалами управления е узла 2 и тем самым свойствами вестибу.тярног о агтарата оператора как измерите, 1Я угловых отклонений. Результат всех действий оиератора, т. е, у: ловое положение кресла, отображается для
да;1ьнеЙ1пего анализа па блоке 12.
Формула изобретения
. Устройство для тренировки вестибулярного анпарата, содержанлее подвижное
рабочее .место оператора с узло.м ручного унрав.ления, блок моделирования возмущающих воздействий, соде)жа1пий узел смеще- |1ия рабочего места оператора, связанный с рабочим местом оператора, с тремя датчиками угловых координат и с соответствую- щи.ми усилителями мон1ности, генератор и блок регистрации, отличающееся тем, что, с це;|ью новын1е1-1пя точности устройства, блок моделирования возмундающих воздействий содержит три усилителя с регули- 1)уемым коэффициеигом усиления и три цепочки, каждая из которых состоит из последов;: тел ) (.:оединенных инвертора, коммутатора н сумматора, при этом выходы сумматоров иодключены к входам соответствующих уси, 1ителей моп1ностп, датчики угловых
коордипат подключены к блоку регенерации и к входам соответствуюихих инверторов, а узе,:| pyHHOi o управления соединен с входами усилителей с регулируемым коэффициентом уси;1ения, выхс1ДЬ1 которых соединены с вторыми входами соответствующих коммутаторов, третьи входы которых подключены к ге- нерато|1у.
2. Устройство по п. 1, отличающееся те.М; что узе.1 смешения рабочего места онера- то)а содержит три кольца карданова подвеса, оси вращения которых взаимно пер- нен.тикулярны, последовательно соединенные четы)е оноры, нервая из которых жестко сое- динена с впутрепни.м ко, 1ьцом карданова нодвеса и совмещена с второй и третьей опорами, вьпюлиенными с возможностью смещеПИЯ одпа от|-к)ст ельпо дру| ой вдоль одной оси.
иг. /
К 5
OmS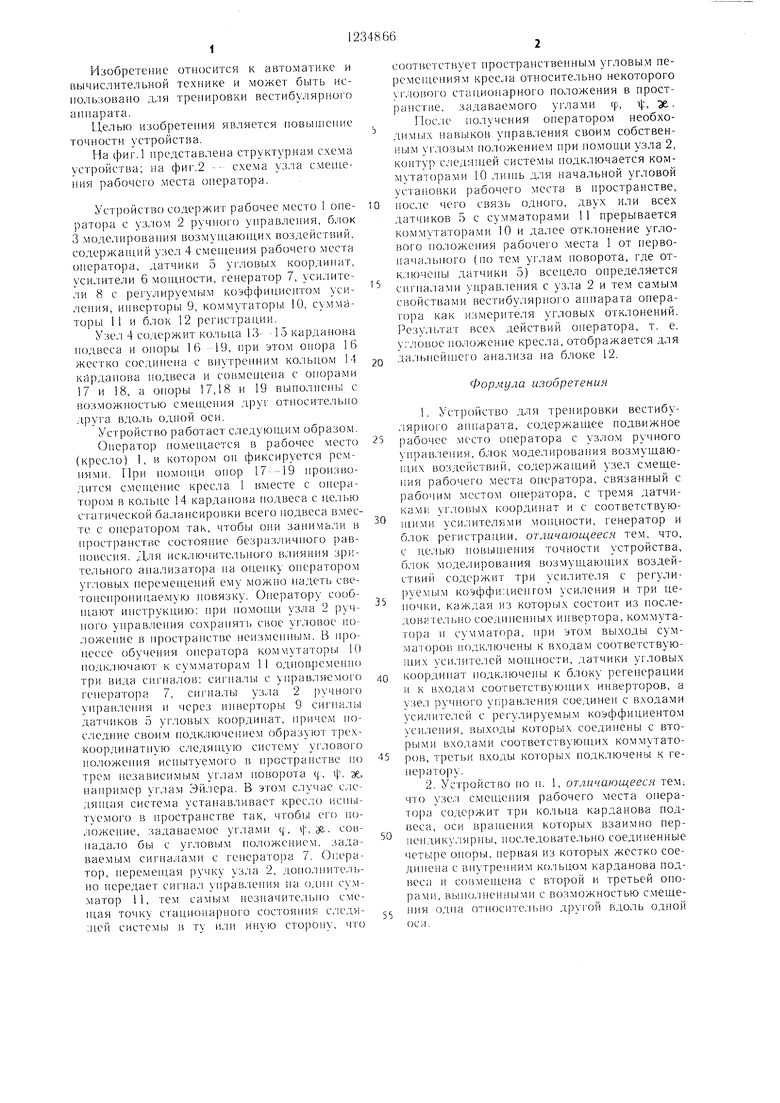
Изобретение относится к области автоматики и вычислительной техники и может быть иснользовано для тренировки вестибулярного аппарата. Целью изобретения является повышение точности устройства. Устройство содержит подвижное рабочее кресло оператора с узлом ручного управления, блок моделирования возмущающих воздействий. содержащий узел смешения рабочего места оператора, связанный с рабочим местом оператора и с тремя датчиками угловых координат, выходы которых подключены к соответствующим усилителям мощности, генератор и блок регистрации. Цель достигается введением в устройство трех усилителей с регулируемьЕм коэффициентом усиления и трех цепочек, каждая из которых состоит из последовательно соединенных инвертора, коммутатора и сумматора, соединением их между собой и другими элементами устройства, и выполнением узла смещения рабочего места оператора из трех колец карда нот; подвеса, оси вращения которых взаимно перпендикулярны, из последовательно соединенных четырех опор, первая из которых жестко соединена с внутренним ко,льцом кар- данова подвеса и совмещена с второй и третьей опорами, выполненными с возможностью смещения одна относительно другой вдоль одной оси. I з.п. ф-лы, 2 ил. to (Л
Фиг. 2
| ТРЕНАЖЕР ДЛЯ ИССЛЕДОВАНИЯ И ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 0 |
|
SU328500A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Денисов В | |||
| Г., Онищенко В | |||
| Ф | |||
| Инженерная психология в авиации и космонавтике | |||
| М.: Машиностроение, 1972, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
