Изобретение относится к машиностроению и может быть использовано в механизмах для передачи или преобразования движений.
Цель изобретения - повышение эксплуатационной надежности механизма при весь- ма малых и даже отрицательных силах инерции за счет тормозного устройства, удерживающего корпус в момент выхода обеих полугаек из зацепления с винтом.
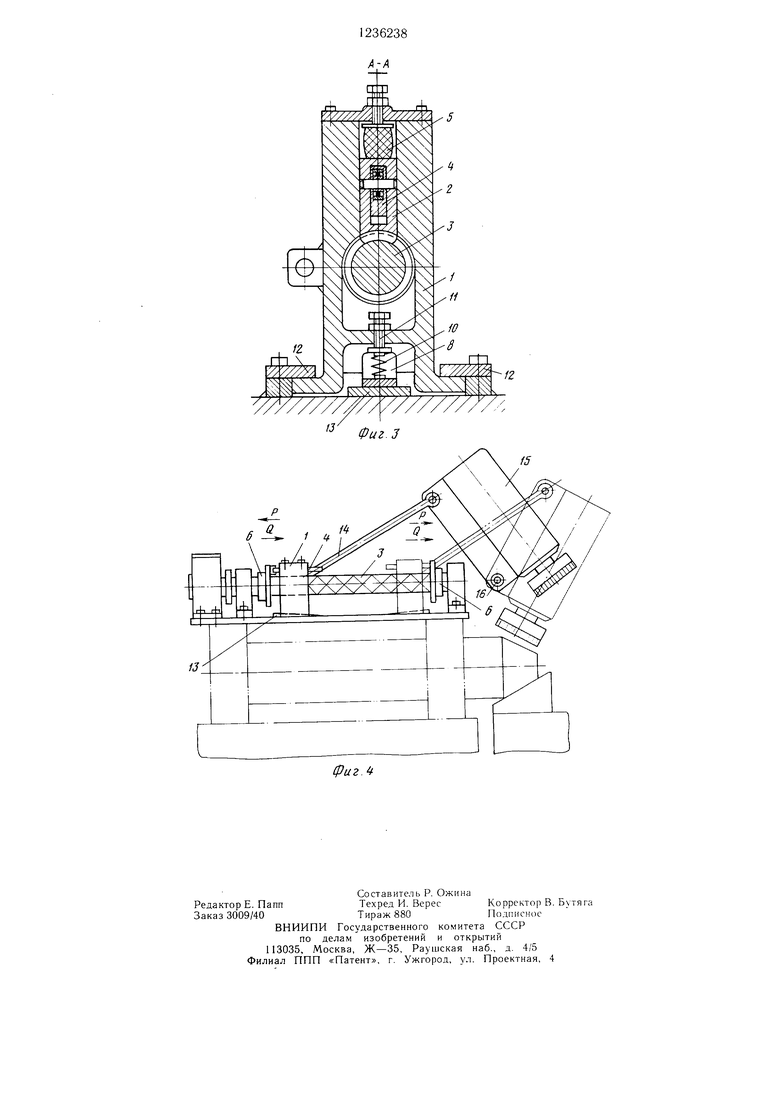
На фиг. 1 изображен предлагаемый ме- 70 ханизм в момент вывода обеих полугаек из зацепления с винтом, когда тормозное устройство удерживает корпус механизма в достигнутом положении относительно винта; на фиг. 2 - то же, в момент принудительного перевода ползуна в требуемое положение относительно корпуса выступаю- шим участком упора и включение одной из полугаек; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - схема действия сил на
15
Механизм работает следующим образом.
Корпус 1 механизма передвигается по направляющим 12, наезжая тормозным устройством в виде П-образной планки 8 в момент выхода обеих полугаек из зацепления на наклонную передвижную площадку 13. При передвижении корпуса 1 механизма через рычаг 14 приводится в движение индукционный нагреватель 15, вращающийся вокруг оси 16.
Сила действия упругих элементов 10 регулируется. Непосредственно на винте 3 с резьбами противоположного направления установлены кольцевые упоры 6, вращающиеся вместе с винтом 3. На поверхности соприкосновения упора 6 с ползуном 4 выполнен выступающий участок плавного подъема с высотой не менее половины длины наклонного участка ползуна.
В MorvieHT выхода обеих полугаек 2 из
корпус механизма в крайних положениях. 2озацепленЕ я с винтом 3 корпус 1 механизма
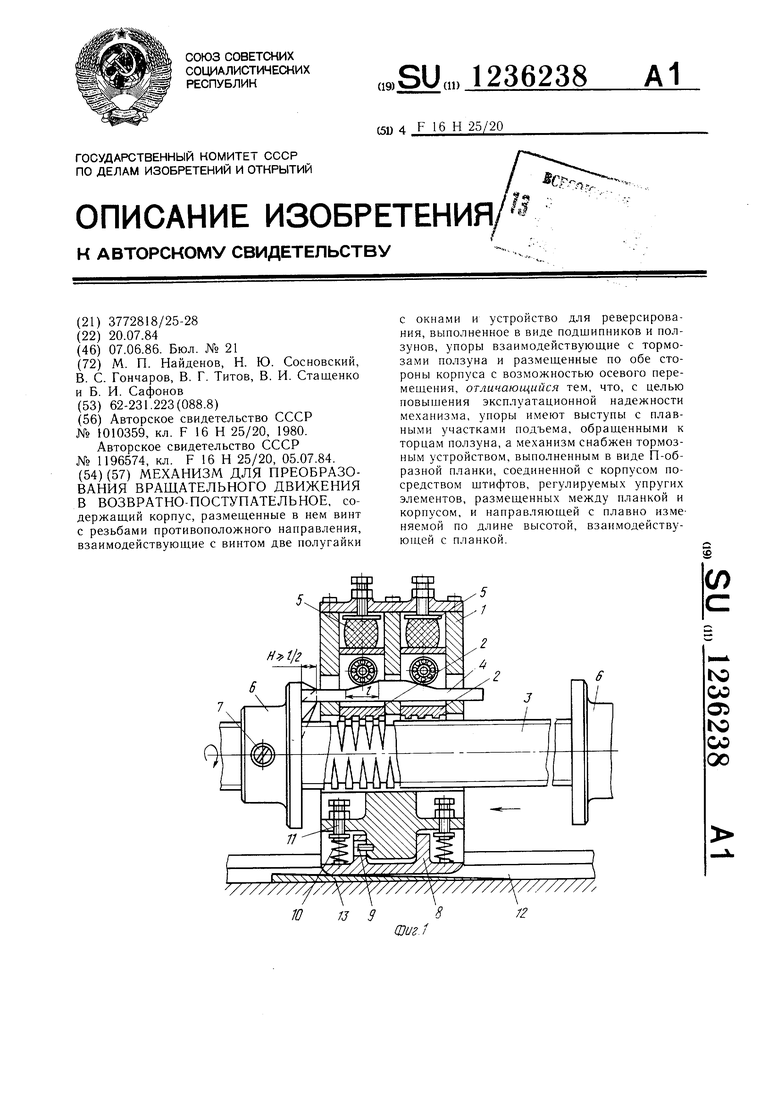
Механизм для преобразования вращатель-удерживается в достигнутом положении за
ного движения в возвратно-поступательноесчет тормозного устройства в виде П-обимеет корпус 1, в котором установленыразной планки 8. При дальнейшем вращедве полугайки 2, входящие поочередно в зацепление с винтом 3 при помощи ползуна 4, демпферов 5 и упоров 6, закреп- 25 ленных на винте с помощью винтов 7, тормозное устройство, состоящее из тормозной П-образной планки 8, соединенной с корпусом посредством штифта 9, упругими элементами 10 и регулировочными винтами П. Механизм включает направляющие 12 и наклонную площадку 13.
НИИ винта 3 на ползун 4 наезжает выступающий участок упора 6 и задвигает его в корпус 1 принудительно. Происходит включение одной из полугаек 2 и корпус 1 механизма начинает двигаться с зацеплением вдоль винта 3 к другому упору 6.
Предлагаемое конструктивное решение обеспечивает работу механизма при нормальных, малых и отрицательных по вели- 4H}ie силах инерции перемещающихся масс.
Механизм работает следующим образом.
Корпус 1 механизма передвигается по направляющим 12, наезжая тормозным устройством в виде П-образной планки 8 в момент выхода обеих полугаек из зацепления на наклонную передвижную площадку 13. При передвижении корпуса 1 механизма через рычаг 14 приводится в движение индукционный нагреватель 15, вращающийся вокруг оси 16.
Сила действия упругих элементов 10 регулируется. Непосредственно на винте 3 с резьбами противоположного направления установлены кольцевые упоры 6, вращающиеся вместе с винтом 3. На поверхности соприкосновения упора 6 с ползуном 4 выполнен выступающий участок плавного подъема с высотой не менее половины длины наклонного участка ползуна.
В MorvieHT выхода обеих полугаек 2 из
НИИ винта 3 на ползун 4 наезжает выступающий участок упора 6 и задвигает его в корпус 1 принудительно. Происходит включение одной из полугаек 2 и корпус 1 механизма начинает двигаться с зацеплением вдоль винта 3 к другому упору 6.
Предлагаемое конструктивное решение обеспечивает работу механизма при нормальных, малых и отрицательных по вели- 4H}ie силах инерции перемещающихся масс.
Фиг. 3
15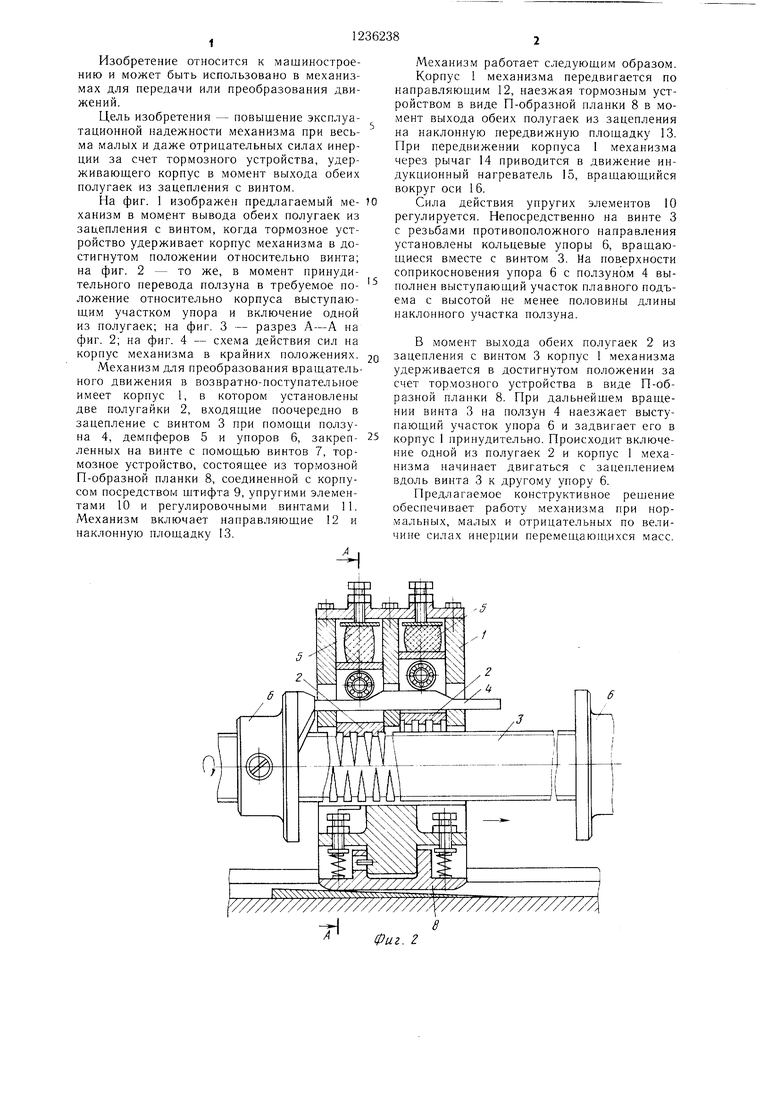
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для преобразования вращательного движения в возвратно-поступательное | 1980 |
|
SU1010359A1 |
| Механизм для преобразования вращательного движения в возвратно-поступательное | 1984 |
|
SU1196574A1 |
| Привод перемещения подвижного узла | 1980 |
|
SU942936A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| ЗУБЧАТО-РАМОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2003 |
|
RU2266446C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ЛИСТОВЫХ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО ФЛАНЦЕВ ИЗ ШИН К ВОЗДУХОВОДАМ И СЕКЦИЙ КАРМАННЫХ ФИЛЬТРОВ ОЧИСТКИ ВОЗДУХА | 2015 |
|
RU2617805C2 |
| Устройство для формирования горловины мешка | 1982 |
|
SU1047780A1 |
| СПОСОБ СОЕДИНЕНИЯ ЛИСТОВЫХ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО ФЛАНЦЕВ ИЗ ШИН К ВОЗДУХОВОДАМ, СЕКЦИЙ КАРМАННЫХ ФИЛЬТРОВ ОЧИСТКИ ВОЗДУХА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557844C1 |
| Автоматическое устройство для подачи | 1983 |
|
SU1165548A1 |
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2075986C1 |
| Приспособление для автоматической намотки нити на катушку | 1928 |
|
SU10359A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Механизм для преобразования вращательного движения в возвратно-поступательное | 1984 |
|
SU1196574A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
