Х| 00
ч
О О
чэ
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения системы регулирования технических объектов, содержащих значительные запаздывания и подверженных влиянию неконтролируемых внешних воздействий.
Предполагается, что динамика канала регулирования достаточно хорошо аппрок- сймируетЬя моделью
; ..: V(t) Kfc) U(t - г) + W(t),
где Y(t) - выход объекта регулирования;
U(t).- регулирующие воздействия;
K(t) - коэффициент передачи, существенно изменяющийся во времени (t);
W(t) - неконтролируемые внешние возмущения, изменения которых носят ступенчатый характер, причем интервал между этими изменениями превышает время переходного процесса системы;
т- время чистого запаздывания.
Примером таких систем в промышленности является, в частности система автоматического регулирования температуры в рабочем пространстве нагревательного колодца обжимного цеха, где коэффициент передачи, характеризующий влияние изменений расхода газа на температуру рабочего пространства печи меняется в течение периода нагрева в зависимости от массы садки, марки стали, температуры металла и других факторов,
Задача регулирования состоит в обеспечении инвариантности регулируемой координаты от внешних воздействий и изменений коэффициента передачи К, Один из возможных подходов в таких ситуациях состоит в косвенном измерении характеристик внешних воздействий, прогнозировании этих измерений на интервал длительности г и в использовании результатов прогнозирования в функции управления.
Известен регулятор, содержащий сумматор, низкочастотный фильтр, в частности апериодическое звено первого порядка, охваченный положительной обратной связью, и обратную модель обьекта без запаздывания.
Недостатком этого регулятора является низкая точность регулирования.
Наиболее близким по технической сущности является регулятор Реовика, содержащий последовательно соединенный измеритель рассогласования, блок обратной модели объекта без запаздывания, сумматор, элемент задержки и масштабирующий элемент, первый и второй входы измерителя рассогласования подключены к первому и второму входам регулятора, выход сумматора подключен к выходу регулятора, а выход
масштабирующего элемента - к второму входу сумматора,
При работе известного устройства на первый, положительный, вход измерителя рассогласования подается сигнал, пропор0 циональиый заданному значению регулируемой величины, на второй вход - измеряемый сигнал, Выходной сигнал измерителя рассогласования подается на вход блока обратной модели объекта без запаз5 дывания и далее на первый вход сумматора, в котором происходит суммирование выходного сигнала блока обратной модели объекта без запаздывания с выходным сигналом масштабирующего элемента, который пред0 варительно задерживается в элементе задержки. Результат суммирования поступает на вход элемента задержки и одновременно на выход регулятора в качестве регулирующего воздействия на объект.
5 Недостаток известного устройства заключается в низкой точности регулировав ния, обусловленной временным дрейфом коэффициента передачи регулируемого объекта.
0 Цель изобретения - повышение точности регулятора.
Поставленная цель достигается тем, что в регулятор, содержащий измеритель рассогласования, подключенный выходом к ин5 формационному входу обратной модели объекта управления без запаздывания, соединенной выходом с первым входом сумматора, подключенного вторым входом к выходу блока чистого запаздывания, при0 чем суммирующий и вычитающий входы из- мерителя рассогласования являются входами задания и регулируемой величины регулятора, введены блок управления моделью и экстраполятор, соединенный
5 входом с выходом сумматора, а выходом - со входом блока чистого запаздывания, вход блока управления моделью подключен к выходу измерителя рассогласования, а выход- к управляющему входу обратной моде0 ли объекта управления без запаздывания, причем блок управления моделью состоит из двухтактного детектора, источника постоянного сигнала и последовательно соединенных сигнум-реле, первого элемента
5 чистого запаздывания, первого умножителя, масштабирующего элемента, второго умножителя, элемента сравнения, третьего умножителя и второго элемента чистого запаздывания, подключенного выходом ко второму входу третьего умножителя, суммирующий вход элемента сравнения соединен с выходом источника постоянного сигнала, вторые входы первого и второго умножителей соединены с выходами, соответственно, сигнум-реле и двухтактного детектора, входы которых соединены друг с другом и являются входом блока управления моделью, а выход третьего умножителя является выходом блока управления моделью, обратная модель объекта управления без запаздывания выполнена в виде делителя, входы которого деликтов и делитель являются соответственно информационным и управляющим входами, а выход - выходом обратной модели объекта управления без запаздывания, выход экстраполятора является выходом регулятора, а время запаздывания блока и элементов чистого запаздывания равны времени запаздывания объекта управления.
Введение совокупности новых блоков и связей позволяет распознавать ситуации, когда модельный коэффициент передачи Км управляемого объекта отличается от его действительного значения Кд, и корректировать это значение, что повышает точность регулирования.
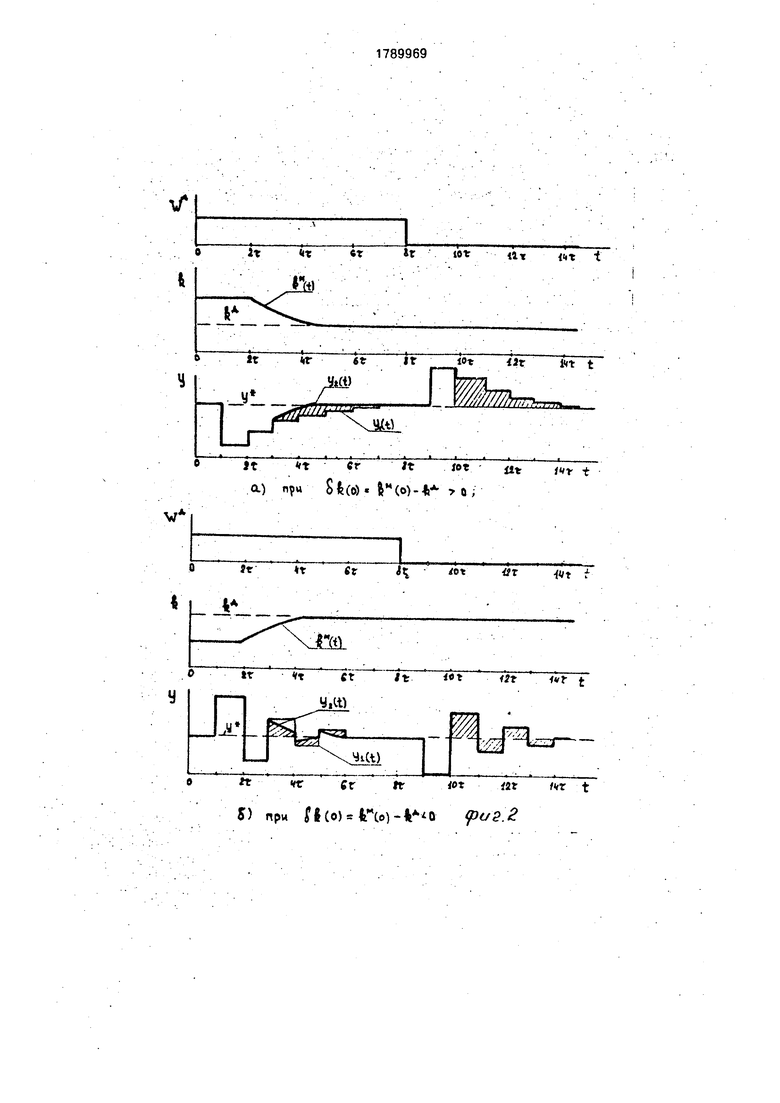
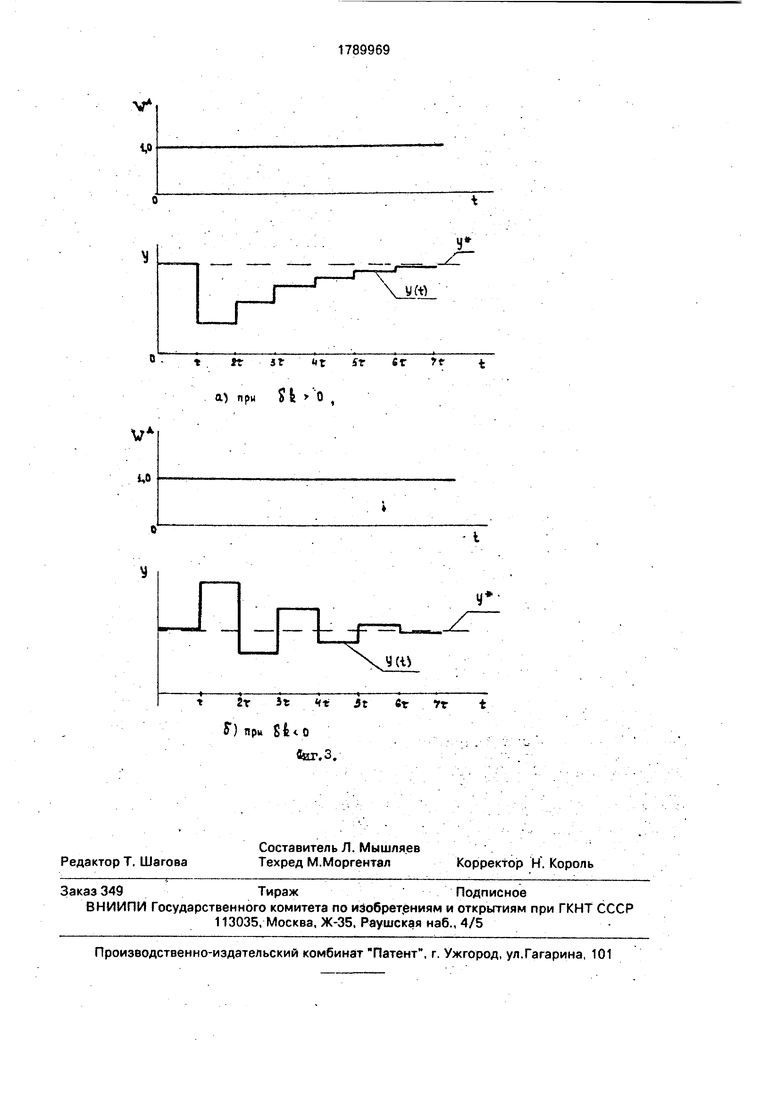
На фиг. 1 представлена блок-схема регулятора; на фиг. 2 - результаты проверки эффективности предлагаемого регулятора; на фиг. 3 - типичный характер переходного процесса в системе регулирования в ответ на единичное ступенчатое воздействие при условиях, когда:
а) д К Км - Кд 0 и
б) 6 К Км - Кд 0.
На фигурах приняты следующие обозначения:
V(t) - выходной сигнал системы регулирования (регулируемая величина);
Y - заданное значение регулируемой величины;
U(t) - выходной сигнал регулятора (регулирующее воздействие);
д Y{t) « Y - Y(t) - сигнал ошибки регулирования;
KM(t) - сигнал, пропорциональный модельному значению коэффициента передачи регулируемого объекта;
) - внешнее возмущение на объект;
Кд-действительное значение коэффициента передачи регулируемого объекта;
Yi(t) - переходный процесс в системе регулирования с регулятором-прототипом;
Ya(t) - переходный процесс в системе регулирования с предлагаемым регулятором;
т- запаздывание в регулирующем канале объекта.
Регулятор содержит последовательно соединенные измеритель 1 рассогласования, блок 2 обратной модели объекта без запаздывания, сумматор 3, экстраполятор 5 4, блок 5 чистого запаздывания, выход которого соединен со вторым входом сумматора 3, блок 6 управления обратной моделью, включающий последовательно соединенные сигнум-реле 7, первый элемент 8 чисто0 го запаздывания, первый умножитель 9, масштабирующий элемент 10, последовательно соединенные двухтактный детектор 11, второй умножитель 12, элемент 13 сравнения, ко второму входу которого подклю5 чен источник 14 постоянного сигнала, а к выходу-третий умножитель 15, выход которого соединен со входом второго элемента 16 чистого запаздывания и вторым входом блока 2 обратной модели объекта без за0 паздывания, а второй вход с выходом источника 14 постоянного сигнала, выход масштабирующего элемента 10 соединен со вторым входом второго умножителя 12, выход измерителя 1 рассогласования соеди5 нен со входом сигнум-реле 7 и входом двухтактного детектора 11.
В процессе функционирования регулятор выполняет две основные функции;
формирование регулирующих воздей0 ствий с целью компенсации ошибки регулирования;
2) непрерывное уточнение коэффициента передачи регулируемого объекта.
Реализация первой функции осуществ5 ляется следующим образом. На первый вход измерителя рассогласования 1 подается сигнал Y. пропорциональный заданному значению регулируемой величины, а на второй вход - измеряемый сигнал Y(t)..B изме0.рителе рассогласования из заданного значения вычитается измеряемый сигнал, формируя на своем выходе сигнал 6 Y(t), пропорциональный ошибке регулирования, т.е. д Y(t) Y - Y(t). Сигнал ошибки, проходя
5 через блок обратной модели 2 объекта без запаздывания, формирует сигнал, пропор1
циональный значению
Г
Y - Y(t), (где
Км - модельный коэффициент передачи объ- екта), который в свою очередь поступает на первый вход сумматора 3. В сумматоре этот сигнал складывается с входным сигналом первого элемента чистого запаздывания 5, Результат суммирования подается на вход экстраполятора 4, выходной сигнал которого поступает в качестве регулируемого воздействия U(t) на выход регулятора и одновременно на вход первого элемента чистого запаздывания 5. Таким образом,
регулятор реализует следующий закон регулирования
U(t) fa{UB(t-TM)};
UB(t - О U(t - О + --- IV - Y(t); к
где fa - оператор экстраполирования.
Процедура уточнения коэффициента передачи регулируемого объекта базируется на следующих соображениях.
При заданном законе регулирования
U(t) UB(t-iM);
UB(t - Iм) U(t - О + -L- Y - Y(t),
Км
1,
где для простоты рассуждений f3 модели объекта
Y(t) Кд U(t - it) + W(t - г), где WA - возмущение, имеющее ступенчатый характер изменения, и при выполнении условий
Л
U(t) U(t); Y const;
,
необходимо определить алгоритм регулирования, выполняющий и функцию уточнения коэффициента Км.
При таких условиях ошибка регулирования будет обусловлена неточностью коэффициента передачи, т.е.
Если д К 0, то есть Км Кд, то в соответствии с расчетом по указанным выше формулам переходный процесс в системе регулирования в ответ на единичное ступенчатое воздействие по возмущению, - г4) 1, имеет форму, представленную на фиг. 3, а.
Если б К 0, т.е. Км КА, то ошибка регулирования имеет знакопеременный характер, аналогичный представленному на фиг. 3,6,
Таким образом, по форме переходного процесса Y(t) в рассматриваемой системе регулирования можно распознавать указанные выше ситуации, т.е. 6 К 0 или 5 К О, и осуществлять непрерывную корректировку коэффициента передачи Км регулируемого объекта в соответствии со следующим алгоритмом:
KM(t) KM(t-т) t(5Y(t)l -slgn6Y(t)x
х sign д Y(t - т);
где fi - настроечный коэффициент, изменяющийся в диапазоне 0-1 и уточняемый в процессе настройки и эксплуатации регулятора, б Y(t) - Y - Y(t).
С учетом последнего алгоритм функционирования предлагаемого регулятора будет иметь вид:
U(t) UB(t-t); UB(t-T) U(t-t) +
KM(t)
(t),
KM(t) KM(t-r)- 1 -Ј Y(t)l sign д Y(t)x x sign б Y(t-t); 6 Y(t) Y - Y(t).
Устойчивость линейных прогнозирующих систем регулирования, к классу которых относится и САР с предлагаемым регулятором общеизвестна, в том числе и для систем с внутренними положительными обратными связями,
Добавление контура поднастройки коэффициентэ передачи канала регулирования не влияет на устойчивость САР в целом, так как предложенная процедура утончения этого коэффициента является сходящейся. Это наглядно видно из результатов моделирования, представленных на фиг. 2. При моделировании были приняты следующие значения коэффициентов передачи регулирующего канала:
д 2,0; Км(о) 3 (случай а) фиг. 2);
Км(0) 1 (случай б) фиг. 2).
Применение моделирования для доказательства сходимости процедуры уточнения коэффициента передачи вызвано тем, что принятая процедура является нелинейной и затрудняет использование аналитических методов.
Реализация алгоритма уточнения коэффициента передачи KM(t) осуществляется с помощью блока 6 управления моделью следующим образом.
Сигнал ошибки регулирования д Y(t) поступает с выхода измерителя рассогласования 1 на вход сигнум-реле 7, на выходе которого формируется сигнал, пропорциональный значению sign 5 Y(t). Этот сигнал поступает на второй вход первого умножителя 9 и на вход элемента чистого запаздывания 8, формируя на выходе последнего сигнал, пропорциональный
значению sign д Y(t- т ). Этот сигнал, поступая по первому входу в первый умножитель 9, умножается там на сигнал, пропорциональный значению sign д Y(t), формируя на выходе первого умножителя
д сигнал, пропорциональный произведению sign 5 Y(t) -sign д Y(t - т), который, проходя через масштабирующий элемент 10, образует на его выходе сигнал, пропорциональный значению/ sign б Y(t) -sign б Y(t-1).
Одновременно с этим сигнал, пропорциональный ошибке регулирования б Y(t), поступает с выхода измерителя рассогласования 1 на вход двухтактного детектора 11, выходной сигнал которого, пропорциональный Y(t) I, поступает по второму входу во второй умножитель 12. На первый вход второго умножителя 12 поступает сигнал с выхода масштабирующего элемента 10, который умножается на значение д Y(t)l, и на выходе элемента формируется сигнал, пропорциональный значению р Y(t) -sign 5Y(t-T)| (5Y(t)I, который поступает на первый вход элемента сравнения 13. На второй вход этого элемента сравнения поступает единичный сигнал с выхода источника постоянного сигнала 14. Таким образом, на входе элемента сравнения 13 формируется сигнал, пропорциональный значению 1 -/3 sign б Y(t) -sign 6 Y(t - т) I 5Y (t)|, который по первому входу поступает в третий умножитель 15, на второй вход которого поступает с выхода второго элемента чистого запаздывания 16 сигнал, пропорциональный значению KM(t - т). На выходе третьего умножителя 15 образуется сигнал, пропорциональный значению
KM(t) KM(t - г) 1 -/ sign б Y( t) x xslgn(W(t-T) dY(t)l,
который поступает на вход второго элемента чистого запаздывания 16 и на второй вход блока 2 обратной модели объекта без запаздывания, корректируя тем самым значение 5 коэффициента передачи регулируемого объекта.
Таким образом,точность регулирования повышается за счет того, что в блоке 6 управления моделью, состоящем из сигнум-реле 7,
0 первого элемента чистого запаздывания 8, первого умножителя 9, масштабирующего, элемента 10, двухтактного детектора 11, второго умножителя 12, элемента сравнения 13, источника постоянного сигнала 14,
5 третьего умножителя 15 и второго элемента чистого запаздывания 16, непрерывно осуществляется уточнение подверженного переменному дрейфу значения коэффициента передачи регулируемого объекта.
0Проверка эффективности работы системы регулирования с предлагаемым регулятором по сравнению с регулятором-прототипом показала (см. фиг. 2), что предлагаемый регулятор обеспечивает по5 вышение точности функционирования системы регулирования по среднемодульному отклонению выхода объекта от задания в 1,3 раза и выше в зависимости от интенсивности изменения внешних возмущающих воз0 действий и времени запаздывания в канале регулирования.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Система управления | 1984 |
|
SU1244636A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| РЕГУЛЯТОР | 2011 |
|
RU2448354C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
Использование: для построения систем регулирования технических объектов, содержащих значительные запаздывания и подверженных влиянию неконтролируемых внешних воздействий. Цель: повышение точности. Сущность изобретения: регулятор содержит измеритель рассогласования 1. блок обратной модели объекта без запаздывания 2, сумматор 3, экстраполятор 4. блок чистого запаздывания 5, блок управления обратной моделью б, сигнум-реле 7, элементы чистого запаздывания 8,16, умножители 9,12.15, масштабирующий элемент 10, двухтактный детектор 11, элемент сравнения 13, источник постоянного сигнала 14. 3 ил.
Формула изобретен и я Регулятор, содержащий измеритель рассогласования, подключенный выходом к информационному входу обратной модели объекта управления без запаздывания, соединенной выходом с первым входом сумматора, подключенного вторым входом к выходу блока чистого запаздывания, причем суммирующий и вычитающий входы измерителя рассогласования являются входами задания и регулируемой величины . регулятора, отличающийся тем, что, с целью повышения точности регулятора, в нем установлены блок управления моделью и экстраполятор, соединенный входом с выходом сумматора, а выходом - с входом блока чистого запаздывания, вход блока управления моделью подключен к выходу измерителя рассогласования, а выход - к управляющему входу обратной модели объекта управления без запаздывания, причем блок управления моделью состоит из двухтактного детектора, источника постоянного сигнала и последовательно соединенных; сигнум-реле, первого элемента чистого запаздывания, первого умножителя, масштабирующего элемента, второго умножителя, элемента сравнения, третьего умножителя и второго элемента чистого запаздывания, подключенного выходом к второму входу третьего умножителя, суммирующий вход элемента сравнения соединен с выходом источника постоянного сигнала, вторые входы первого и второго умножителей соединены с выходами соответственно сигнум-реле и двухтактного детектора, входы которых соединены друг с другом и являются входом блока управления моделью, а выход третьего умножителя является выходом блока управления моделью, обратная модель объекта управления без запаздывания выполнена в виде делителя, входы которого Делимое и Делитель являются соответственно информационным и управляющим входами, а выход - выходом обратной модели объекта управления без запаздывания, выход экстраполятора является выходим регулятора, а времена запаздывания блока и элементов чистого запаздывания равны времени запаздывания объекта управления.
it«it «t it t tit it t
0It t СГ It jot iJ /(/r t
a) nvu 8fe(o)« fcM(o)-li 7 o;
оtt t er J ct tfr
оtr t et ;t «t «r t
9to ч Cr it яг /vr t
5) при Шо) Гсо) риг.2
V
V
| Hide Hakura, Joshlkazu Nlshlkawa | |||
| Stability of a System with Process-Model Controller, ЦИОНТ ПИК ВИНИТИ Report Chlba Institute of Technology № | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Турецкий X, Анализ и синтез системы управления с запаздыванием, М.: Машиностроение, 1974, с | |||
| Приспособление для подвешивания тележки при подъемках сошедших с рельс вагонов | 1920 |
|
SU216A1 |
