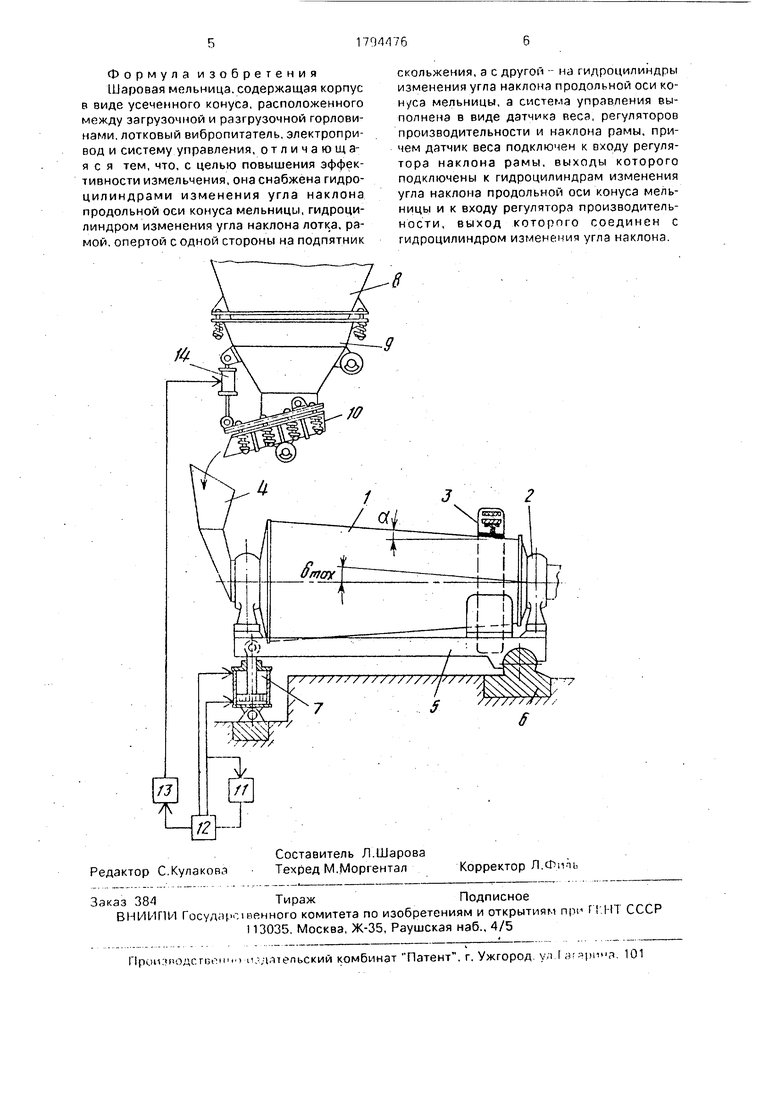
ответственно продольной оси конусного корпуса мельницы. Исходный сыпучий материал из бункера 8 и подпружиненного подбункера 9, с помощью универсального вибропитэтеля с изменяемым углом наклона лотка 10 подается в течку 4 мельницы 1. Регулирование угла наклона рамы 5 осуществляется по сигналу датчика веса 11 через регулятор 12 наклона рамы. Изменение производительности сыпучего материала осуществляетсярегулятором 13 производительности и регулирующим органом - гидроцилиндром 14 изменения угла наклона лотка 10.
Шаровая мельница работает следующим образом.
В качестве датчика внутримельничного заполнения использован датчик веса 11, который через пропорциональное ему давление в гидроцилиндрах 7 измеряет момент массы всего измельчительного агрегата. Этот момент равен произведению длины плеча на полную массу всего агрегата. Плечо равно длине между осью гидроцилиндров 7 и осью подшипников 6 (постоянная величина). Масса агрегата состоит из массы шаров и материала (переменная величина), а также массы мельницы, двигателя и рамы (постоянная величина). Датчик 11 веса измеряет переменную составляющую шаромате- риальной массы, характеризующую процесс измельчения в мельнице. Такой датчик прост и надежен в работе, обладает абсолютной помехозащищенностью, а из общего значения веса не сложно вычислить сигнал пропорциональный величине переменной шароматериэльной составляющей.
Режим работы САУ выбран так, что, например, при увеличении веса измельчаемого материала относительно заданного значения, сигнал датчика 11 через регулятор 12 будет воздействовать на гидроцилиндры 7,уменьшая угол наклона д продольной оси мельницы 1 относительно горизонтальной оси, и увеличивая тем самым коэффициент заполнения шарбв в начале и уменьшая его в конце мельницы. Процесс изменения угла будет осуществляться регулятором 12 до тех пор. пока разность между измеряемым весом и заданием регулятору не будет рэвно 0. Последовательно от датчика обратной связи регулятора 12 наклона рамы заводится сигнал на второй канал наклон мельницы-произп.одительность. Этот сигнал через регулятор 15 производительности перемещает {иток гидроцилиндра 14 так.
0
5
0
5
0
чтобы уменьшить угол наклона лотка вибропитателя 10. т.е. уменьшить производительность исходного материала.
Таким образом, алгоритм работы САУ составлен так. чтобы при увеличении шаро- материальной составляющей веса за счет увеличения количества материала гидроцилиндры 7 уменьшали угол д мельницы 1, а вибропитатель 10 уменьшал производительность мельницы, и наоборот.
Граничные условия изменения угла наклона продольной оси конусной мельницы составляют от д - 0, при котором продольная ось мельницы совпадает с горизонтальной осью и f5max - ее, где а - угол наклона образующей конуса с горизонтальной осью. При втором условии нижняя образующая конуса совпадает с горизонтальной осью. При несоблюдении граничных условий происходит сдвиг корпуса по оси влево или вправо, что приведет к разрушению подшипников 2.
Оперативное перераспределение коэффициента заполнения шаров вдоль мельницы в пределах одной и той же шаровой загрузки позволяет эффективно воздействовать на процесс измельчения, так как в пределахдиапэзона регулирования угла наклона от 0 0 до йтах а коэффициент заполнения последовательно изменяется по длине конусного корпуса соответственно ОТ р нач. р кон. И р нач. f кон.
р кон.
Поскольку в шаровых мельницах практически исчерпаны резервы для принятия тех или иных решений по оптимизации процесса измельчения,.а шаровая загрузка, как ее общее количество, так и распределения по длине мельницы обеспечивает решающее влияние на измельчаемый материал, то оперативное перераспределение мелющих тел в конусной мельнице, как новое регулирующее воздействие позволяет в сочетании с традиционными воздействиями радикально расширить степень свободы по оптимальному управлению конусной мельницы.
Новое регулирующее воздействие позволит реально компенсировать непредсказуемо изменяющиеся во времени характеристики измельчаемого материала и оперативно переходить на измельчение разнообразных по качеству марок цемента, а также позволяет повысить удельную поверхность цемента и снизить энергозатраты на измельчение.
Формула изобретения Шаровая мельница, содержащая корпус в виде усеченного конуса, расположенного между загрузочной и разгрузочной горловинами, лотковый вибропитатель, электропривод и систему управления, отличающаяся тем, что, с целью повышения эффективности измельчения, она снабжена гидроцилиндрами изменения угла наклона продольной оси конуса мельницы, гидроцилиндром изменения угла наклона лотка, рамой, опертой с одной стороны на подпятник
скольжения, а с другой - на гидроцилиндры изменения угла наклона продольной оси конуса мельницы, а система управления выполнена в виде датчика веса, регуляторов производительности и наклона рамы, причем датчик веса подключен к входу регулятора наклона рамы, выходы которого подключены к гидроцилиндрам изменения угла наклона продольной оси конуса мельницы и к входу регулятора производительности, выход которого соединен с гидроцилиндром изменения угла наклона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для измельчения | 1990 |
|
SU1724359A1 |
| Система управления лотковым вибродозатором для шаровых мельниц | 1984 |
|
SU1237252A1 |
| Шаровая мельница | 1987 |
|
SU1435289A1 |
| Способ оптимального управления заполнением мельниц измельчаемым материалом и измельчающей средой | 1982 |
|
SU1072903A2 |
| Способ регулирования загрузкой барабанной мельницы мелющими телами | 1974 |
|
SU507357A1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ИЗМЕЛЬЧИТЕЛЬНЫМ АГРЕГАТОМ ЗАМКНУТОГО ЦИКЛА | 1997 |
|
RU2146175C1 |
| Бронефутеровка шаровой мельницы | 1990 |
|
SU1764693A1 |
| Конусная инерционная дробилка | 1982 |
|
SU1080847A1 |
| Способ управления загрузкой шаровой барабанной мельницы | 1982 |
|
SU1066647A1 |
| МНОГОКАМЕРНАЯ МЕЛЬНИЦА-СМЕСИТЕЛЬ | 2011 |
|
RU2474477C1 |