Изобретение отнойится к вычислительным устройствам с ручным управлением и может быть использовано для кинематического анализа .сферических механизмов.
Цель изобретения - расширение класса решаемых задач путем определения параметров плоского аналога сферических механизмов.
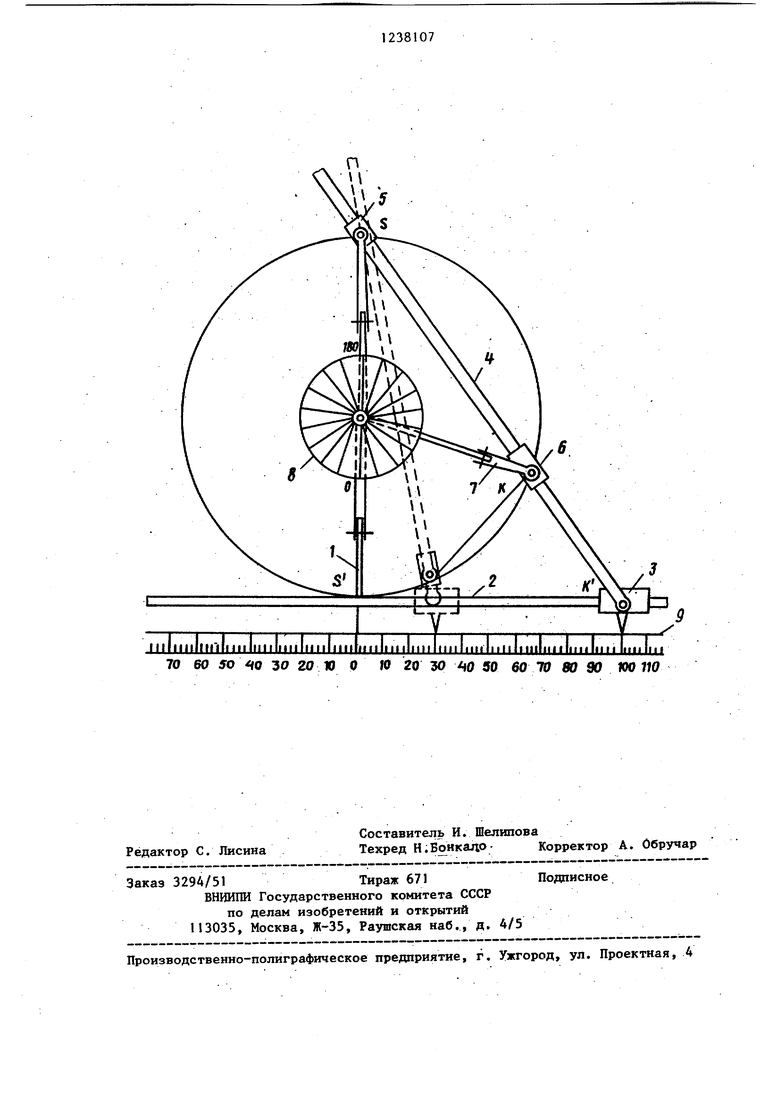
На чертеже схематически изображен предлагаемый механизм, общий вид.
Механизм инверсионного преобразования состоит из регулируемой по длине стойки 1, образующей радиус базисной сферы, жестко соединенной со стержнем 2, на котором расположен первый ползун 3, шарнирно.связанный с первым рычагом 4, на кбтором, в свою очередь, расположены третий и второй ползуны 5 и 6, шарнирно связанные соответственно со стойкой I и вторым рычагом 7, регулируемым по длине и образующим радиус сферы, соединенным с центром стойки, где уста- 1(1овлен лимб 8. На стержне нанесена отсчетная шкала 9,
Механизм инверсионного преобразования работает следующим образом.
В зависимости от радиуса базисной сферы устанавливается длина стойки 1 и рычага 7. Устанавливают точку пересечения рычагов 4 и 7 в искомой точке звена плоского аналога, расположенной на большом круге сферы, тогда указатель ползуна 3 обозначает на -шкале 9 стержня 2 соответствующую инверсную ей точку. Если переместить точку пересечения рычагов 4 и 7 в другую точку звена плоского аналога, которая также расположена на большом круге сферы, то указатель ползуна 3 обозначит на шкале 9 инверсную ей точку, а расстояние между двумя инверсными точками будет равняться длине звена плоского аналога, соответственное расстояние в
градусах будет показьгоать штифт рьтча- га 7 на лимбе 8. Можно показать при этом, что механизм осуществляет инверсионное преобразование вида SK SK «(SS ) .
Таким образом, предлагаемый механизм инверсионного преобразования позволяет определить параметры плоского, аналога сферических механизмов, что является одной из важнейших зада ч в теории механизмов и мапган.
Ф о р м у л а и 3 о б р е т е н и я
Механизм инверсионного преобразования, содержащий стержень, на котором размещен первый ползун, шарнир- но соединенный с одним концом первого рычага, второй рычаг, шарнирно соединенный одним концом с вторым.
ползуном,отличающийся тем, что, с целью расширения класса решаемых задач за счет определения параметров плоского аналога сферических механизмов, он содержит третий ползун, лимб и регулируемую по длине стойку, жестко прикрепленную одним концом перпендикулярно к стержню, к .другому концу которой шарнирно присоединен третий ползун, установленный на первом рычаге, на кото- .ром установлен также второй ползун, при этом другой конец второго рычага шарнирно , соединен с центром регулируемой по дпине стойки, в котором закреплен лимб, второй рычаг вы.полней регулируемым по дпине, а на
стержне нанесена отсчетная 1вкала.
llliiinlin ilniiliiiniinliiiilnii
70 60 SO f{Q 30 20 TO P Ю 20 30 ЦО 50 60 70 Ю SO WO 7JO
Редактор С. Лисина
Заказ 3294/51Тираж 671Подписное
ВНИИПИ Государствениого комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
nil
nilllinilnililltl Г1|11|1Ц1Ц111П11|1|1П lull lilt
Составитель И. Шелипова
Техред Н.Брнкадо- Корректор А. Обручар
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулисно-рычажный механизм инверсионного преобразования | 1985 |
|
SU1305718A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК КЕПЛЕРОВСКИХ ТОЧЕК И РЕШЕНИЯ ЗАДАЧ В ПРОЕКЦИЯХ СФЕРЫ | 1990 |
|
RU2022357C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| Чертежный прибор | 1984 |
|
SU1214499A1 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| МЕХАНИЗМ ДЛЯ РАЗМЕТКИ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА ОБЩЕГО ВИДА | 1969 |
|
SU240271A1 |
| Кулисно-рычажный механизм инверсора | 1987 |
|
SU1514993A1 |
| Устройство для измерения размеров трубы | 1990 |
|
SU1747862A1 |
Изобретение относится к области вычислительных устройств с ручиым управлением. Цель изобретения - расширение класса решаемых аадач за счет определения параметров плоского аналога сферических механизмов. Меха-низм инверсного преобразования состоит из регулируемой по длине стойки, жестко соединенной со стержнем, на котором расположен первый ползун, шарнирно связанный с первым рычагом, на котором расположены второй и третий ползуны, шарнирно связанные соответственно с., вторьм рычагом и со стойкой. Второй рычаг регулируется по длине и образует радиус сферы, соединенный с центром стойки, на которой установлен лимб. На стержне нанесена .отсчетная шкала. Длину стойки и второго рычага устанавливают в зависимости от радиуса базисной сферы. Установив точку пересечения рычагов в искомой точке звена плоского аналога, расположенной на большом круге сферы, на ртсчетной шкале стержня по положеншо указателя первого ползуна определяют соответствующую ей инверсную точку. 1 ил. (Л
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1979, т | |||
| П, с | |||
| Станок для нарезания зубьев на гребнях | 1921 |
|
SU365A1 |
| Поддержка для шпулек, катушек и т.п. | 1924 |
|
SU1308A1 |
| Там же, с | |||
| Способ получения и применения продуктов конденсации фенола или его гомологов с альдегидами | 1920 |
|
SU362A1 |
| Приспособление для автоматической загрузки топлива в топку | 1924 |
|
SU1305A1 |
