ползуны 3, 4, 6, 7, 9, 17, 18 19, стержни 14, 16, рычаги 5, 10, телескопические стержни 8,, 135 15, лимбы 11,1.12, Для определения угла поворота выходного звена сферического механизма, соответствующего углу поворота выходного звена, на плоской модели устанавливают ползуны 19 и 17 на рычаге 1 и стержне 14 соответИзобретение относится к вычислительным устройствам с ручным управлением и может быть использовано для кинематического анализа.
Цель изобретения - расширение клас са решаемых задач за счет определения функциональной зависимости между углами ВЫХ.ОДНЫХ звеньев сферического механизма и его ппоской модели.
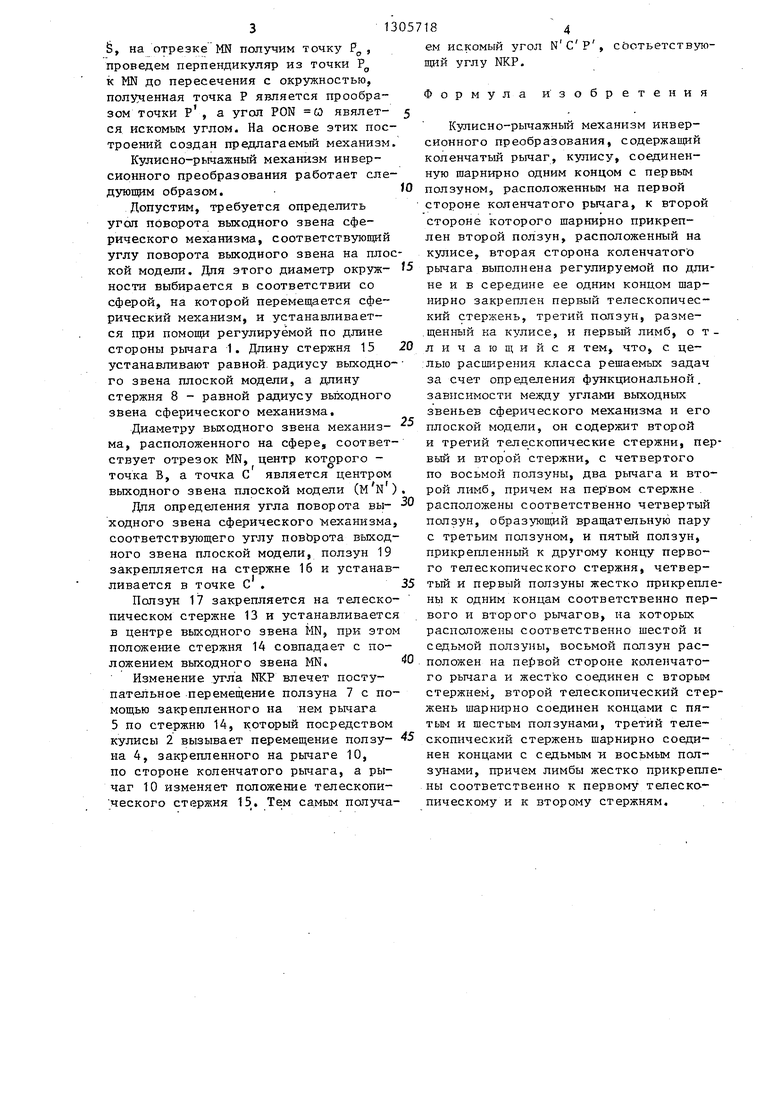
На фиг, 1 изображен кулисно-ры- чажный механизм инверсионного преобразования, общий вид; на фиг, 2 пример определения функциональной зависимости между углами выходных звеньев сферического механизма и его плойкой модели; на фиг. 3 - четырех- звенный стержневой механизм ABCD с четырьмя вращательными парами.
Кулисно-рьгчажный механизм инверсионного преобразования содержит коленчатый pbwar 1, 2, сйязанную с его сторонами шарнирно при помощи второго и первого ползунов 3 и 4, первый рычаг 5, соединенный с кулисой 2, скользящей в третьем ползуне 6, входящем во вращательную пару с четвертым ползуном 7, второй телескопический стержень 8, соединенный с рычагом 5 при помощи шестого ползуна 9, второй рычаг 10, лимбы 11 и 12. первый телескопический стержень 13р первьй стержень 14, третий телескопический стержень 15 и второй стержень .16. Телескопический стержень 13 одним концом соединен шарнирно с серединой регулируемой по длине стороной коленчатого рычага 1, а другим концом при помощи пятого ползуна 17 - со стержнем 14 и стержнем 8, другой конец которого соединен при помощи ползуна 9
ственно в центре выходного звена плоской модели и выходного звена сферического механизма. Предварительно задают соответствующие значения длин стержней 8, 15 и одной из сторон-рычага 1 равными соответственно радиусу выходного звена сферического меха- низма, выходного звена плоской модели и диаметру сферы, 3 ил.
5
0
5
0
5
шаргшрно с рычагом 5, Ползун 4 соединен жестко с рычагом 10, соединенным шарнирно лри помощи седьмого ползуна 18 с телескопическим стержнем 15, другим концом соединенным шарнирно с восьмым ползуном 19,
Работа кулисно-рьиажного механизма инверсионного преобразования основана на следующих предпосылках.
Пусть для изображенного на фиг. 3 четырехзвенного стержневого механизма с .четырьмя вращательныг-ffl парами а - ведущее звено, а с - ведомое.Рассмотрим плоск-ую модель этого механизма. При построении плоской модели сферического механизма ввиду того,, что изображающая плоскость проходит параллельно плоскости ведущего звена, углы поворота сферического механизма и плоской модели соответств-уют друг другу. Углу поворота ведущего . звена на плоской модели соответству- ет определенный угол поворота ведомого звена, но углы поворота ведомого звена плоской модели и сферического механизма не равны. Для определе- функциональной зависимости между этими углами необходимо использовать инверсионное преобразование.
На фиг, 2 отрезок MN является диаметром окружности, описанной точкой С вьЕ одного звена, а отрезок М N - ее инверсией. Допустим, углу поворота входного звена на плоской модели соответствует угол со выходного звена, но он не идентичен углу поворота выходного звена cD сферичес-кого меха- ни з-ма.
Для нахонодения угла Q из точки 0 р опускают перпендикуляр к оси X, Соединим точку Р с центром инверсии
JO
ё, на отрезке MN получим точку Р, проведем перпендикуляр из точки Р к MN до пересечения с окружностью, полученная точка Р является прообразом точки , а угол PON СО явялет- 5 ся искомым углом. На основе этих построений создан предлагаемый механизм.
Кулисно-рычажный механизм инверсионного преобразования работает следующим образом.
Допустим, требуется определить угол поворота выходного звена сферического механизма, соответствующий углу поворота выходного звена на плоской модели. Для этого диаметр окруж- 5 ности выбирается в соответствии со сферой, на которой перемещается сферический механизм, и устанавливается при помощи регулируемой по длине стороны рычага 1. Длину стержня 15 устанавливают равной, радиусу выходно- го звена плоской модели, а длину стержня 8 - равной радиусу выходного звена сферического механизма.
Диаметру выходного звена механиз- ма, расположенного на сфере, соответствует отрезок MN, центр которого - точка В, а точка С является центром выходного звена плоской модели (M N ).
ем искомый угол N С Р , соотьетствую щий углу NKP.
20
Формула и зобретения
Кулисно-рычажный механизм инверсионного преобразования, содержащий коленчатьш рычаг, кулису, соединенную шарнирно одним концом с первым ползуном, расположенным на первой стороне коленчатого рычага, к второй стороне которого шарнирно прикреплен второй ползун, расположенный на кулисе, вторая сторона коленчатого рычага выполнена регулируемой по дли не и в середине ее одним концом шарнирно закреплен первый телескопический стержень, третий ползун, разме- .щенный на кулисе, и первый лимб, о т л и ч а ю а; и и с я тем, что, с це- ,лыо расширения класса решаемых задач за счет определения функциональной, зависимости между углами выходных звеньев сферического механизма и его плоской модели, он содержит второй и третий телескопические стержни, пер вый и второй стержни, с четвертого по восьмой ползуны, два рычага и второй лимб, причем на первом стержне
Для определения угла поворота вы- -30 расположены соответственно четвертый
ходного звена сферического механизма, соответствующего углу повЬрота выходного звена плоской модели, ползун 19 закрепляется на стержне 16 и устанавливается в точке С .35
Ползун 17 закрепляется на телескопическом стержне 13 и устанавливается в центре выходного звена MN, при этом положение стержня 14 совпадает с положением выходного звена MN.
Изменение угла ЖР влечет поступательное перемещение ползуна 7 с помощью закрепленного на нем рычага 5 по стержню 14, который посредством кулисы 2 вызывает перемещение ползу- S иа 4, закрепленного на рычаге 10, по стороне коленчатого рьиага, а рычаг 10 изменяет положение телескопи- неского стержня 15, Тем самым получа
4
N С Р , соотьетствую-
JO
5
5
0
Формула и зобретения
Кулисно-рычажный механизм инверсионного преобразования, содержащий коленчатьш рычаг, кулису, соединенную шарнирно одним концом с первым ползуном, расположенным на первой стороне коленчатого рычага, к второй стороне которого шарнирно прикреплен второй ползун, расположенный на кулисе, вторая сторона коленчатого рычага выполнена регулируемой по длине и в середине ее одним концом шарнирно закреплен первый телескопический стержень, третий ползун, разме- .щенный на кулисе, и первый лимб, о т- л и ч а ю а; и и с я тем, что, с це- ,лыо расширения класса решаемых задач за счет определения функциональной, зависимости между углами выходных звеньев сферического механизма и его плоской модели, он содержит второй и третий телескопические стержни, первый и второй стержни, с четвертого по восьмой ползуны, два рычага и второй лимб, причем на первом стержне
30 расположены соответственно четвертый
ползун, образующий вращательную пару с третьим ползуном, и пятый ползун, прикрепленный к другому концу первого телескопического стержня, четвертый и первый ползуны жестко прикреплены к одним концам соответственно первого и второго рычагов, на которых расположены соответственно шестой и седьмой ползуны, восьмой ползун расположен на пе)вой стороне коленчатого рычага и жестко соединен с вторьм стержнем, второй телескопический стержень щарнирно соединен концами с пятым и шестым ползунами, третий телескопический стержень шарнирно соединен концами с седьмым и восьмым пол- 31,шами, причем лимбы жестко прикреплены соответственно к первому телескопическому и к второму стержням.
(Put.2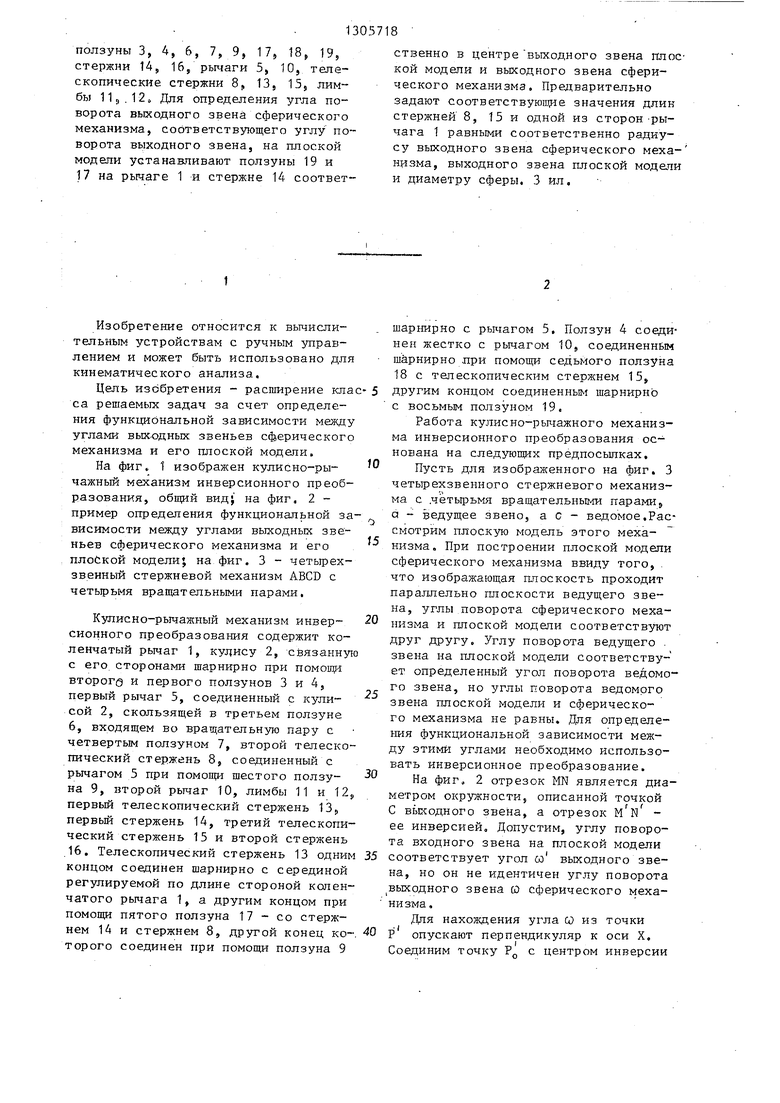
Изобретение относится к вычислительным устройствам с ручньм управлением и может быть использовано для кинематического анализа сферических механизмов. Цель изобретения - расширение класса решаемых задач за счет определения функциональной зависимости между углами выходных звеньев сферического механизма и его плоской модели. Механизм додержит коленчатый рычаг 1, кулису 2, О) с Фи&1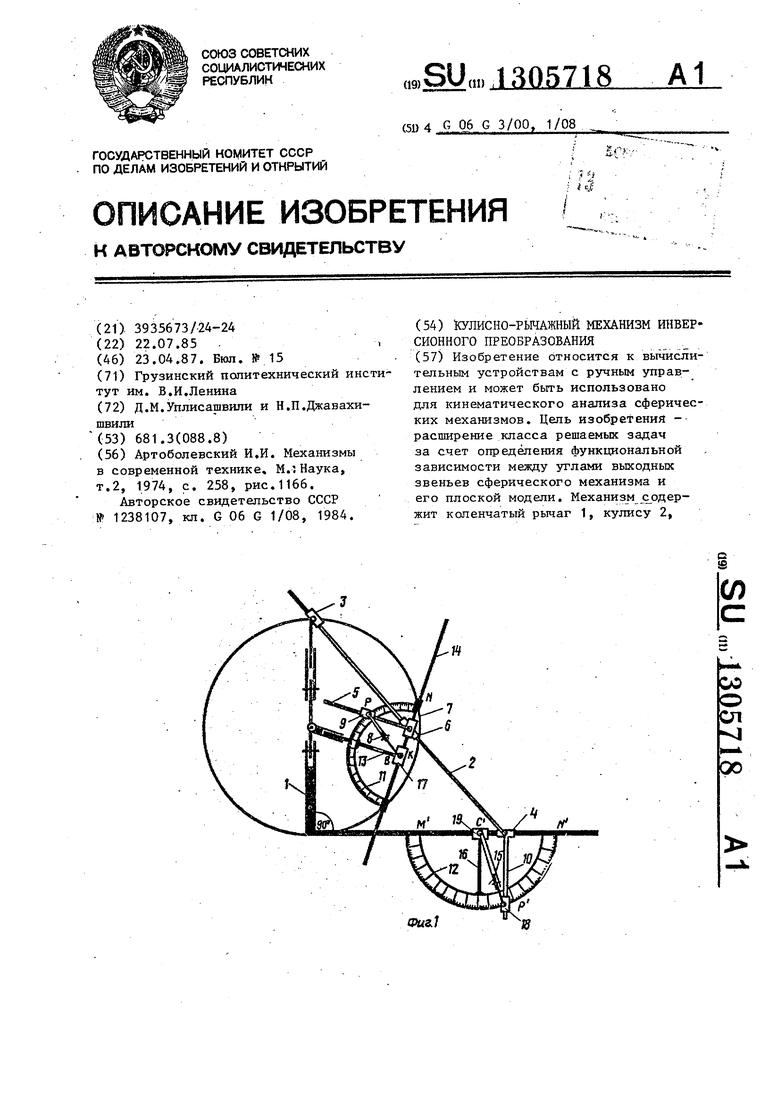
Фиг.З
| Артоболевский И.И | |||
| Механизмы в современной технике, М.: Наука, т.2, 1974, с | |||
| Ведущий наконечник для обсадной трубы, употребляемой при изготовлении бетонных свай в грунте | 1916 |
|
SU258A1 |
| Механизм инверсионного преобразования | 1984 |
|
SU1238107A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
