«
Изобретение отноелтся к автомати ческому управлению и позволяет решать задачи оптимального управления адаптивной системы для объектов с запаздыванием.
Цель изобретения - повыгаение качества регулирования системы.
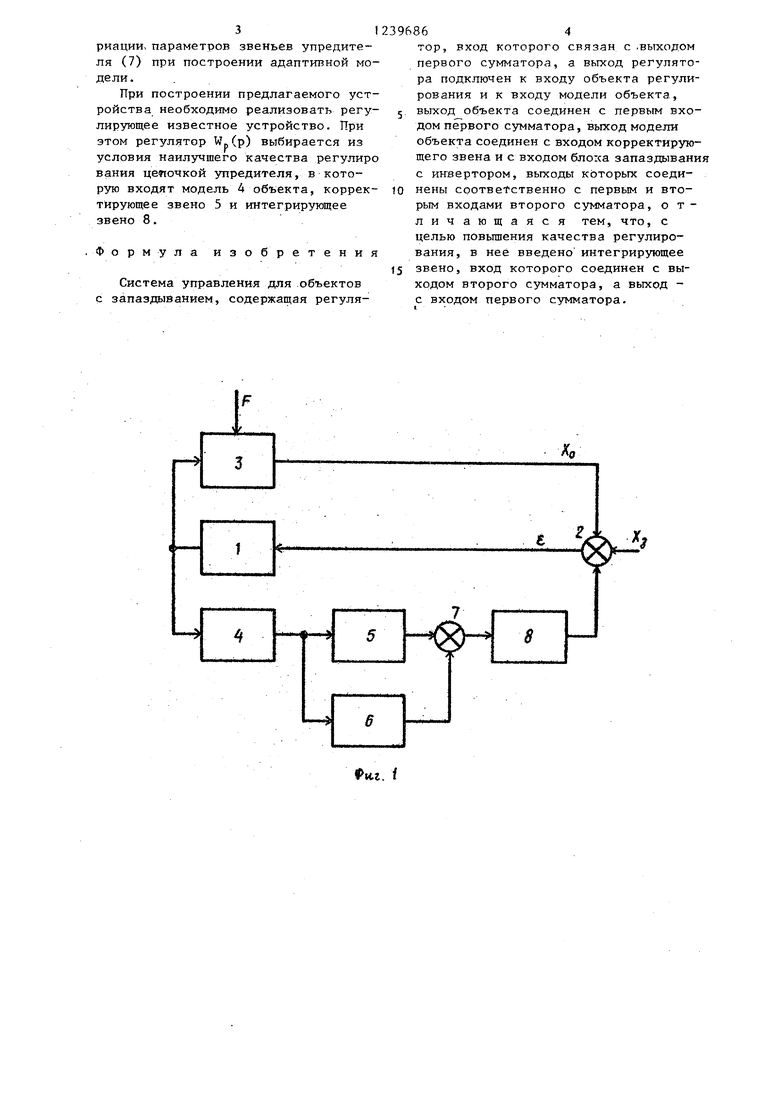
На фиг. 1 представлена блок-схем системы управления для объектов с запаздыванием; ни фиг. 2 - структурная схема упредителя и переходные процессы, протекающие в нем.
Система содержит ПЙД-регулятор 1 вход которого связан с выходом первого сумматора 2, а выход регулятор подключен к входу объекта 3 регулирования и к входу модели 4 объекта (представленного элементарным апери дическим звеном)5 выход модели 4 объекта соединен с входом корректирующего звена 5 и с входом стандартного блока 6 запаздьгоания БПЗ-2М с инв.ертором, выходы которых соединен с входами второго сумматора 7, выход которого соединен с входом первого сумматора через интегрирующее звено 8.
Система управления работает следующим образом.
В установившемся режиме регулиру мая координата Х равна сигналу задания Х и сигнал рассогласования 6 равен нулю. При поступлении возмущения Е на объект 3 начинает изменяться регулируемая координата Х.
На йыходе первого сумматора 2 появляемся сигнал рассогласования, который поступает на вход регулятора На выходе регулятора 1 формируется регул фзующее воздействие, которое пступает на вход объекта 3 регулирования и на вход модели 4 объекта, которая входит в состав упредител
Передаточная функция упредителя с регулятором имеет видw,;(p)-jiiM (
.. )Wo,,(p)(Tr
где Wn(p) - передаточная функция ре .(Р)
. W
ОВ1
гулятора,
передаточная функция модели объекта без запаздывания;
с - запаздьгоание объекта. Предположим, что объект 3 регулирования имеет передаточную функцию вида „
«..(т;р-1Т)р- ™
где К,
- коэфАициент усиления объекта; TQ - постоянная времени объекта. Тогда передаточные функции звеньев цепи упредителя имеют вид модель 4 объекта (апериодическое звено)
oB.M(P -fflT(3)
5 (апериодическорректирующее звено кое :звено)
блок 6 запаздывания с инвертором,
(4)
15
W,/,p)-e интегрирующее звено 8
(5)
W
,г(р)-р-(6)
Цепочка упредителя, состоящая из модели 4 объекта , блока 6 запаздьша- пия с инвертором и интегрирующего звена 8, аналогична передаточной функции объекта и служит для компенсации выходного сигнала объекта. Управление производится по сигналу,, проходящему через цепочку, состоящую из модели 4 объекта, корректирующего звена 5 и интегрирующего звена 8. В этой цепи отсутствует запаздывание и исключается его влияние на процесс ругулирования. Для выяснения физического смысла корректирующего звена рассматривают переходные процессы в утгредителе типа
3.5
Sp ;pV-- г
(7)
На фиг. 2 изображены структурная схема упредителя (7) и переходные процессы, протекающие в нем. При этом установлено, что в системе отсутствует статическая ошибка, т.е. в установившемся режиме на выходе интегрирующего звена 8 сигнал Xj который поступает на вход первого сумматора 2, равен нулю только в том случае, если величина постоянной времени корректирующего звена равна велич:ине запаздывания, а также если эти параметры и коэффициент преобразования интегрирующего звена являются неизменными во времени переходных процессов системы и если между этими звеньями не содержатся звенья с. переменными параметрами.
Из перечисленных условий видно, что вывод интегрирующего звена из состава модели 4 объекта обусловливается устранением статической ошибки, которая может быть в случае вариации параметров звеньев упредите- ля (7) при построении адаптивной модели.
При построении предлагаемого устройства необходимо реализовать регулирующее известное устройство. При этом регулятор W.(р) выбирается из условия наилучшего качества регулиро вания цепочкой упредителя, в которую входят модель Д объекта, корректирующее звено 5 и интегрирующее звено 8.
Формула изобретения
Система управления для .объектов с запаздыванием, содержащая регуля396864
тор, вход которого связан с .выходом первого сумматора, а выход регулятора подключен к входу объекта регулирования и к входу модели объекта, 5 выход объекта соединен с первым входом первого сумматора, выход модели объекта соединен с входом корректирующего звена и с входом блока запаздывания с инвертором, выходы которых соеди10 нены cooTBetcTBeHHo с первым и вторым входами второго сумматора, отличающаяся тем, что, с целью повьппения качества регулирования, в нее введено интегрирующее
t5 звено, вход которого соединен с выходом второго сумматора, а выход - с входом первого сумматора.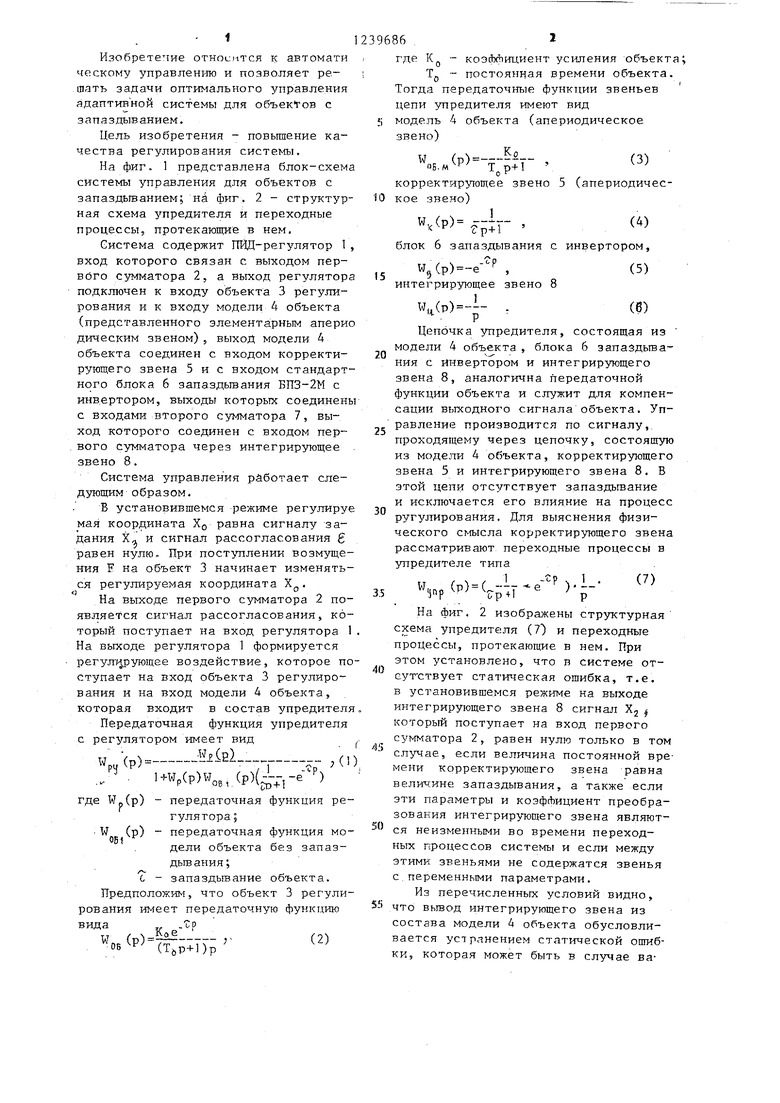
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 1989 |
|
RU2012030C1 |
| Система автоматического регулирования давления пара в магистрали барабанного котла | 2019 |
|
RU2746377C1 |
| Корректирующее устройство | 1987 |
|
SU1478188A1 |
| Устройство для компенсации запаздывания | 1982 |
|
SU1108390A1 |
| Адаптивное регулирующее устройство | 1985 |
|
SU1273878A1 |
| СПОСОБ КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU263016A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
Изобретение относится к области автоматического управления и позволяет решать задачи оптимального управления системой для объектов с за- паздьшанием, содержащих интегрирующее звено. Цель изобретения - повьше- ние качества регулирования. Поставленная цель достигается тем, что в систему, содержащую регулятор, два сумматора, корректирующее звено, модель объекта управления, звено запаздывания с инвертором, введено интегрирующее звено, установленное на выходе второго сумматора. 2 ил-. to со со О) 00 о:
.г. f
Xi
Фиг.2
Составитель П. Кудрявцев Редактор Н. Рогулич Техред О.ГортвайКорректор М, Максимишинец
---- --«---------- ------- - ---- ---------.------------------.-----.--..-.«-.-,., ,- .
Заказ 3395/А8 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Догановский С | |||
| А., Иванов В | |||
| А | |||
| Устройство запаздывания и их применение в автоматических системах.- М.: Машиностроение, 1966, с.280 | |||
| Пневматическое устройство компенсациизАпАздыВАНия | 1975 |
|
SU805255A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
