1 . 1240372 Изобретение относится к сельскому хоэяйству и может использоваться при противоэрозийной обработке почвы.
Цель изобретения - повьппение точности вождения агрегатов вдоль горизонталей склонов.
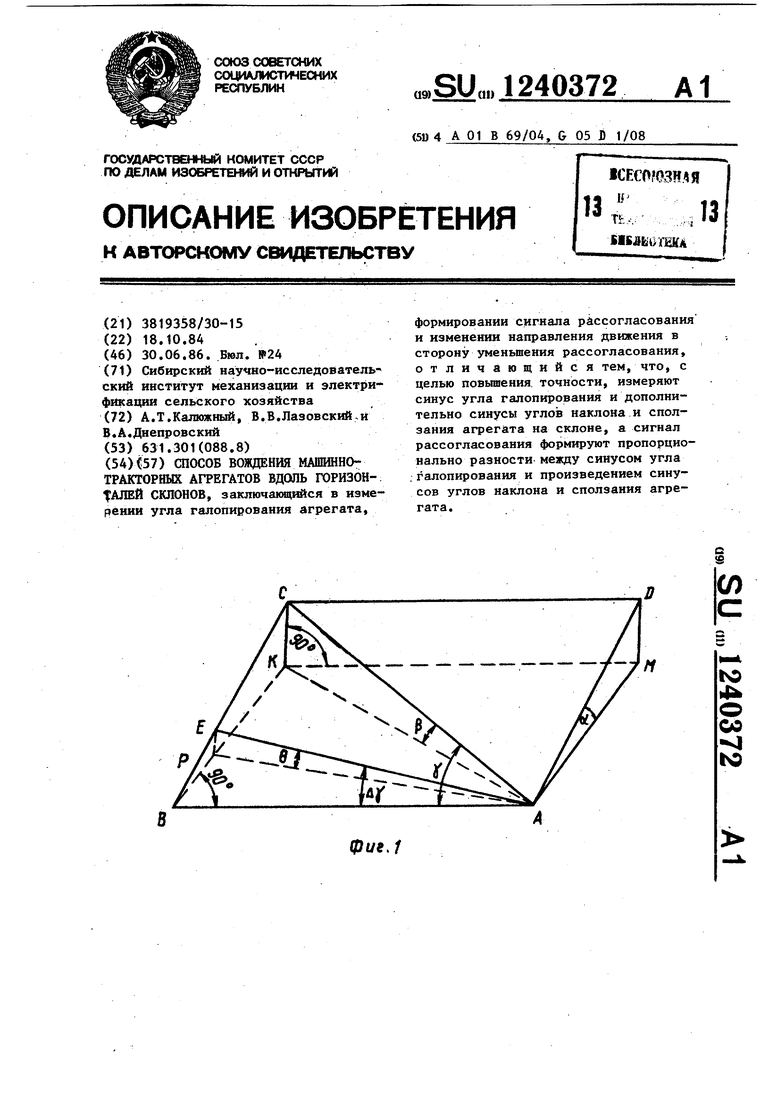
На фиг.1 приведены геометрические пост.роения для математического дочески не зависит от величины сползания агрегата К - Д.
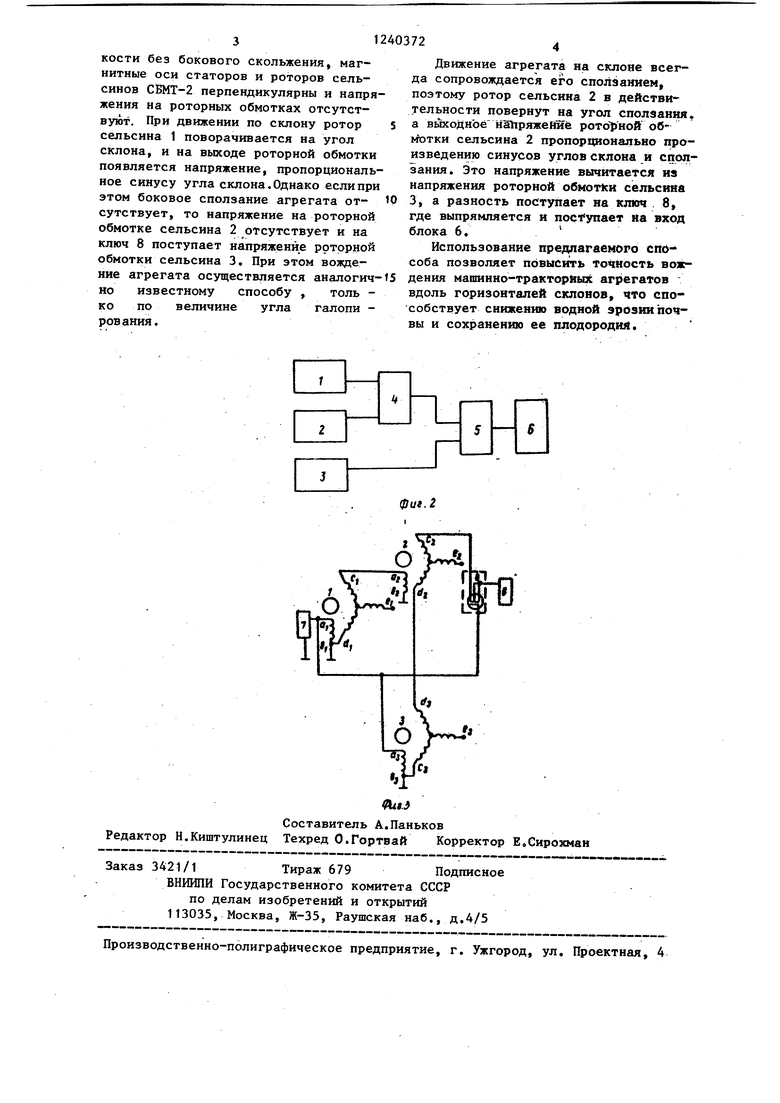
Устройство для осуществления предлагаемого способа содержит измеритель 5 1 синуса угла склона, измеритель 2 синуса угла сползания и измеритель 3 синуса угла галопирования. Выходы измерителей 1 и 2 синусов углов склона сползания соединины с выходами схемы казательства достижения доставленной JO 4 умножения, а выход схемы 4 умноже- цели; на фиг. структурная схема ния и выход измерителя 3 синуса угла устройства для п редлагаемрго способа; галопирования соединены с входами на фиг.З - 7р же, электрическая схема схемы 5 сравнения. Выход схемы 5срав- Йа фиг.1 приняты обозначения: нения соединен с входом блока 6управ- АМКВ - горизонтальная плоскость; 15 ления рулевым механизмом агрегата. АДСВ - поверхность склона; А-место На фиг.З представлена электричес- агрегата на склоне; АС - направление кая схема устройства. В качестве из- продольной оси агрегата; АЕ - направ- мерителей 1 и 3 синусов углов склона ление вектора скорости агрегата; и галопирования используются маятни- АВ - горизонталь склона;i ДАМ 20 ковые креномеры, содержащие в качестве чувствительных элементов бесконтактные сельсины СВМТ-2. Измери- чтель 3 синуса угла спсшзания выполнен в виде дискового самоустаравливающе оС - угол CKnoHaf /- GAK yi - угол галопирования; L САЕ jf- л jf- угол сползания агрегата на склоне; ЁАВ угол рассогласования в плоскости склона; /. ЕАР 0 - угол рас- 25 гося ножа, поводок которого кинема- согласования в вертикальной плоское- тически соединен с валом ротора сель- ти.сина СБМТ-2, используемого в качестДля осуществления предлагаемого ве чувствительного элемента (далее способа измеряют синусы углов склона, измерителиi-1-3 синусов углов склона,
30 сползания и галопирования названы . сельсинами). Питание статорных обмоток сельсинов 1 и 3 осуществляется от генератора 7 переменного напряжения. Роторная обмотка сельсина 1 соединена со статорной обмоткой сельсина 2, чем достигается реализация математической операции перемножения
сползания и галопирования, опре- : деляют значение произведения .синусов УГЛОВ склона и сползания, сравнивают его значение с значением синуса угла
галопирования, формируют рас- ; согласования, как разность сравнивае-. мых величин, изменяют направление движения агрегата в сторону снижения появлякндегося рассогласования.
Из фиг. 1 видно,что
КС АС . sin; и КС BC Sln C АС SiH . sin л
Поэтому Sin - (. О (1)
Э5
40
синусов углов склона и сползания.Роторные обмотки сельсинов 2 и 3 сб еди-. нены последовательно-встречно, чем достигается реализация математической операции вычитания синуса угла
f-Р--- | -X лиг . -----
Сигнал рассогласования О равен раз- галопирования и произв€|дения cHHycqB
45
50
углов склона и сползания. Преобразование переменного напряжения в постоянное осуществляется при помощи ключа 8, в качестве которого может использоваться интегральный ключ К284КН1А.. Выход ключа 8 соединен с входом блока 6 управления рулевым механизмом ,
Сельсины 1 и 3 расположёны гори- получим. , ., . , , л , зонтально, причем ось ротора сельсиJicos У-нпдУ. smoC 5ln0 C05T«H. . (j . , на 1 перпендикулярна направлению
т.е. сигнал рассргласования, склона, а ось ротора 3 параллельна
емьй по предлагаемому способу, про-55 поперечной оси агрегата. Сельсин 3 порционален углу рассогласования в установлен вертикально, вертикальной плоскости 0, и, не за- В исходном состоянии, когда агре- висит от крутизны склона оС и практи- гат движется по горизонтальной плосности синусов углов галопирования и произведения синусов углов склона и сползания -А, т.е.
гаСп -аЦу-лУ).aineC sln -slny-cosi x x-5ino(t cosy-sm4 5inoC. .
Так как cos4 jf Si 1, то, учитывая (1)
контактные сельсины СВМТ-2. Измери- чтель 3 синуса угла спсшзания выполнен в виде дискового самоустаравливающегося ножа, поводок которого кинема- тически соединен с валом ротора сель- сина СБМТ-2, используемого в качестсползания и галопирования названы . сельсинами). Питание статорных обмоток сельсинов 1 и 3 осуществляется от генератора 7 переменного напряжения. Роторная обмотка сельсина 1 соединена со статорной обмоткой сельсина 2, чем достигается реализация математической операции перемножения
синусов углов склона и сползания.Роторные обмотки сельсинов 2 и 3 сб еди-. нены последовательно-встречно, чем достигается реализация математической операции вычитания синуса угла
лиг . -----
кости без бокового скольжения, магнитные оси статоров и роторов сельсинов СБМТ-2 перпендикулярны и напряжения на роторных обмотках отсутствуют. При движении по склону ротор сельсина 1 поворачивается на угол склона, и на выходе роторной обмотки появляется напряжение, пропорциональное синусу угла склона. Однако если при этом боковое сползание агрегата от- сутствует, то напряжение на роторной обмотке сельсина 2 отсутствует и на ключ 8 поступает напряжение роторной обмотки сельсина 3. При этом вождение агрегата осуществляется аналогично известному способу , толь - ко по величине угла галопи - рования.
Движение агрегата на склоне всегда сопровождается его сползанием поэтому ротор сельсина 2 в действительности повернут на угол сползания, а вькодноё наЛряжеНмё рото)ной обмотки сельсина 2 пропорционально произведению синусов углов склона и сползания. Это напряжение вычитается на напряжения роторной обмотКи сельсина 3, а разность поступает на ключ . 8, где выпрямляется и поступает на вход блока 6,
Использование предлагаемого спО соба позволяет повысить точность вождения машинно-тракторных агрегатов : вдоль горизонталей склонов, что способствует снижению водной эрозии почвы и сохранению ее плодородие.
Составитель А.Паньков Редактор Н.Киштулинец Техред О.Гортвай Корректор Е,Сирохман
Заказ 3421/1 Тираж 679 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4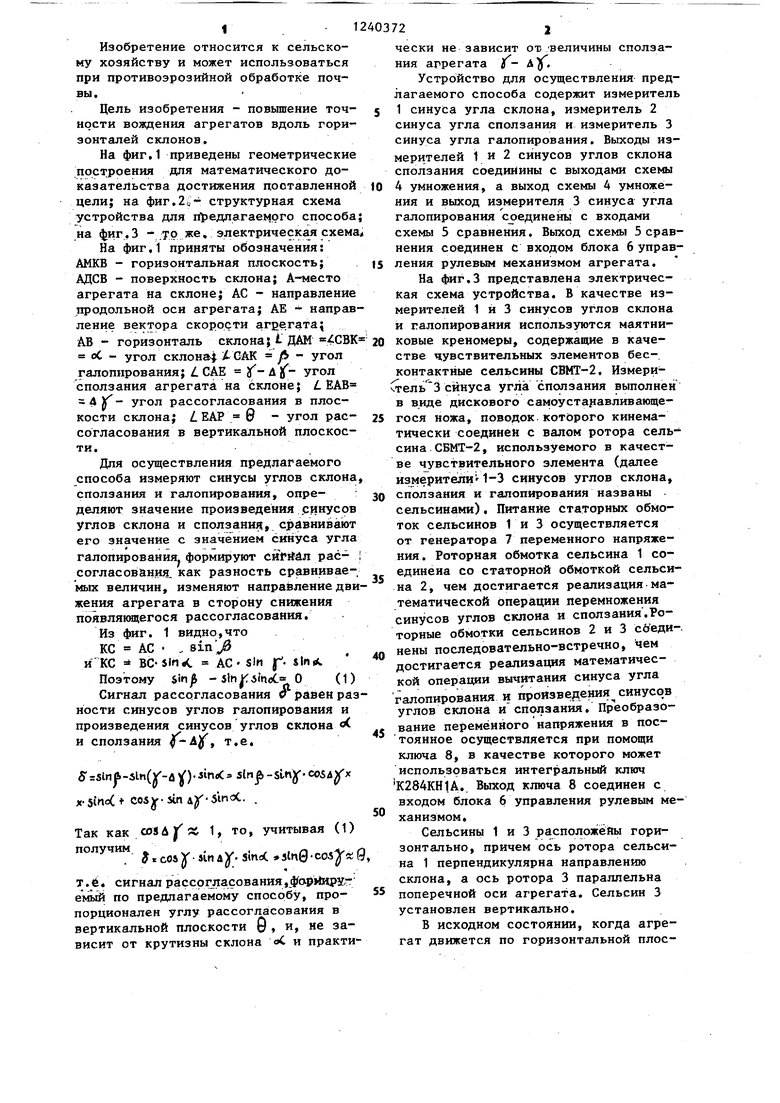
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вождения машинно-тракторного агрегата по горизонталям склонов | 1986 |
|
SU1404005A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Устройство для автоматического выбора кадра в диапроекторе | 1991 |
|
SU1793421A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Устройство для регистрации траектории движения наземного транспортного средства | 1973 |
|
SU478186A1 |
| Устройство для автоматического группового вождения тракторных агрегатов | 1978 |
|
SU751344A1 |
| Устройство для определения направления отклоняющего усилия | 1978 |
|
SU717572A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Дифференциальный индуктивный датчикуглОВыХ пЕРЕМЕщЕНий | 1979 |
|
SU851671A1 |