4 о о о ел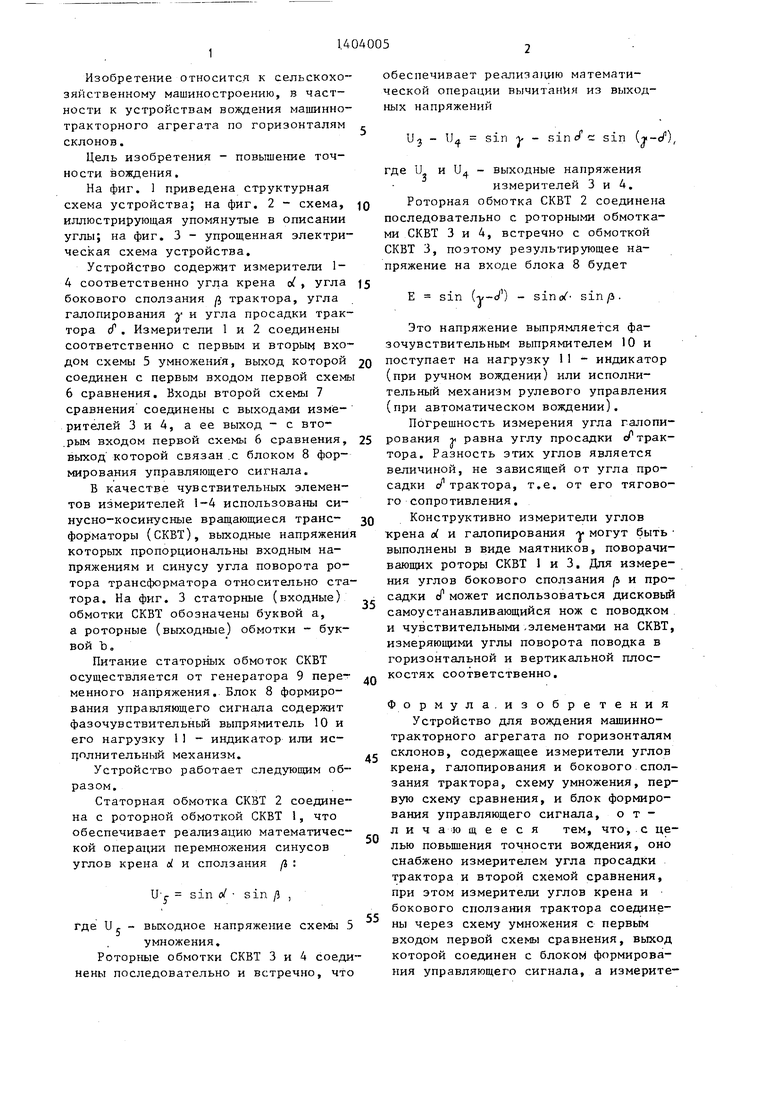
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вождения машинно-тракторных агрегатов вдоль горизонталей склонов | 1984 |
|
SU1240372A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Преобразователь угла поворота вала в код | 1974 |
|
SU503272A1 |
| Измеритель углов поворота подвижного объекта | 1984 |
|
SU1186948A1 |
| Устройство для автоматического вождения тракторного агрегата на виноградниках | 1986 |
|
SU1414338A2 |
| Система определения взаимного положения судов при грузопередаче на ходу траверзным способом | 1972 |
|
SU511248A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |
Изобретение относится к сельскохозяйственному машиностроению, точнее к вождению тракторного агрегата rio горизонталям склонов. Цель изобретения - повышение точности вождения. Устройство содержит измерители 1,2, 3, 4. В качестве чувствительных элементов измерителей использованы сину- сно-косинусные вращающиеся трансфор- маторы. Измерители 1, 2 соответственно угла крена с( и угла бокового сползания ft трактора соединены с первым входом первой схемы 6 сравнения через схему 3 умножения. Измерители 3 и 4 соответственно угла галлониро- вания V и угла просадки «f трактора соединены через вторую схему сравнения с вторым входом первой схемы 6 сравнения. Результирующий сигнал обрабатывается фазочувствительным выпрямителем блока 8 формирования управляющего сигнала. Полученный управ-, ляющий сигнал использзтот либо для индикации отклонения при ручном управлении, либо для воздействия на механизм рулевого управления при ав- . томатическом режиме работы. 3 ил. i СЛ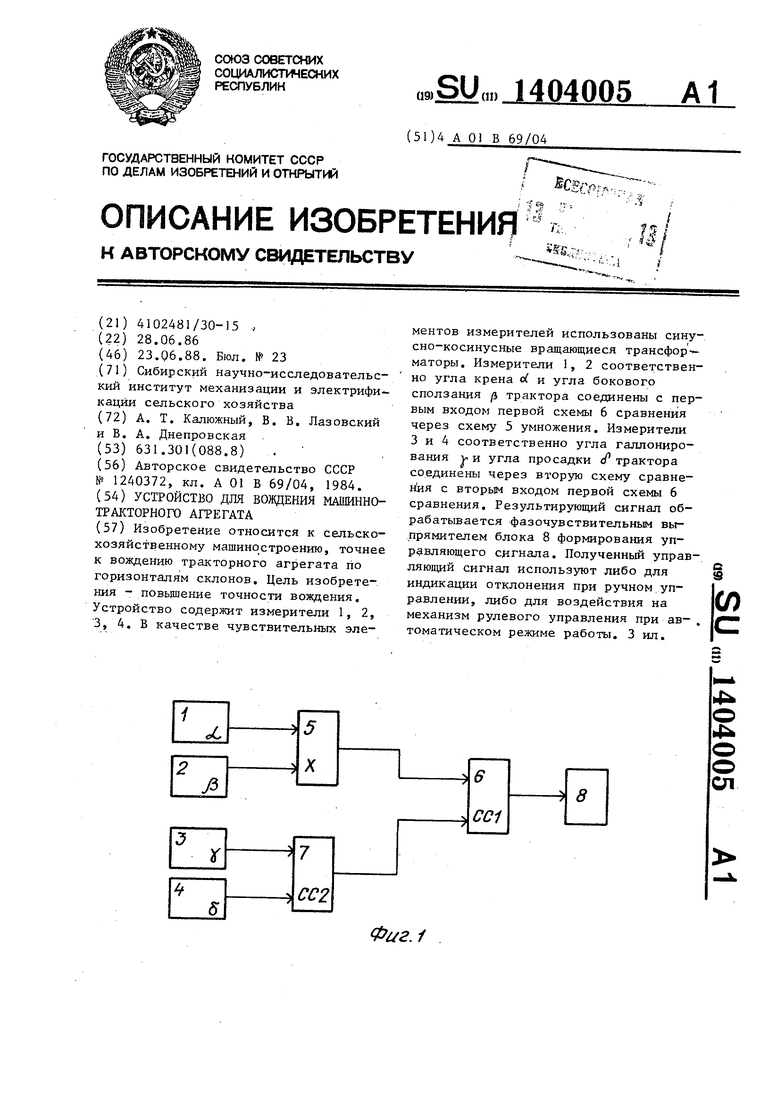
./
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам вождения машинно- тракторного агрегата по горизонталям склонов.
Цель изобретения - повышение точности вождения.
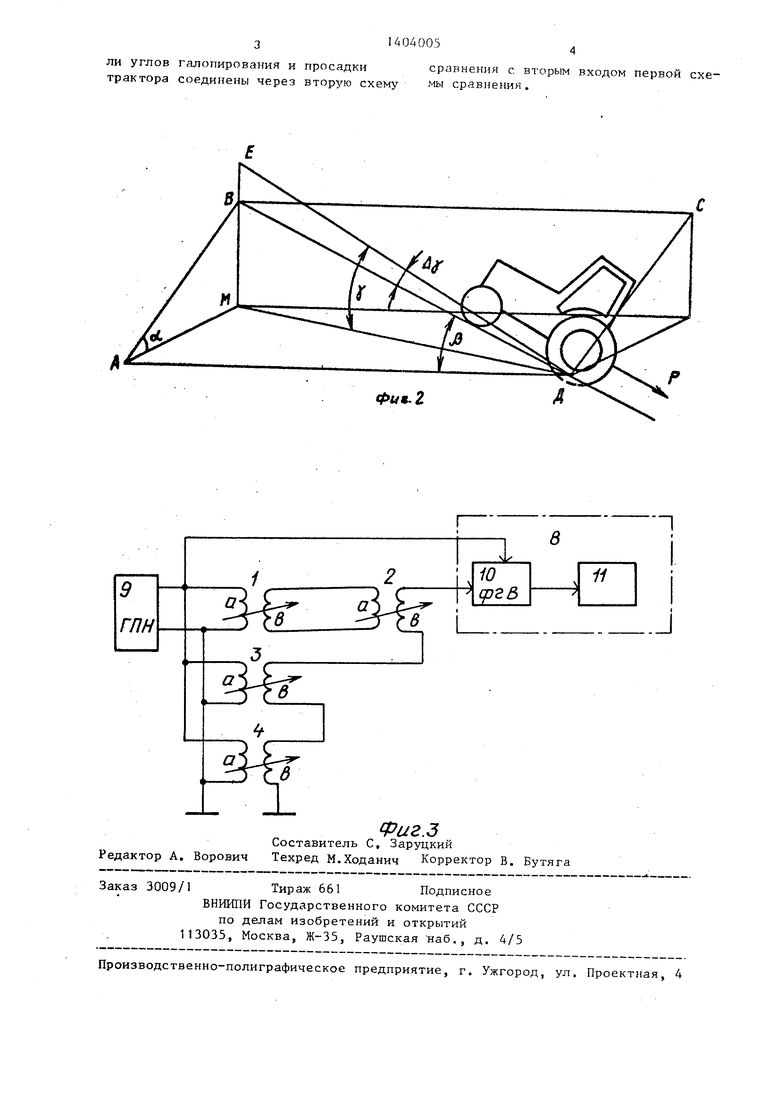
На фиг, 1 приведена структурная схема устройства; на фиг. 2 - схема, иллюстрирующая упомянутые в описании углы; на фиг. 3 - упрош;енная электрическая схема устройства.
Устройство содержит измерители 1- 4 соответственно угла крена о( , угла бокового сползания ft трактора, угла галопирования j и угла просадки трактора сГ . Измерители 1 и 2 соединены соответственно с первым и вторым входом схемы 5 умножения, выход которой соединен с первым входом первой схемы 6 сравнения. Входы второй схемы 7 сравнения соединены с выходами изме- рителей 3 и 4, а ее выход - с вторым входом первой схемы 6 сравнения, выход которой связан .с блоком 8 формирования управляющего сигнала.
В качестве чувствительных элементов измерителей 1-4 использованы си- нусно-косинусные вращающиеся транс- фор маторы (СКВТ), выходные напряжени которых пропорциональны входным напряжениям и синусу угла поворота ротора трансформатора относительно статора. На фиг. 3 статорные (входные) обмотки СКВТ обозначены буквой а, а роторные (выходные) обмотки - буквой Ъ „
Питание статорных обмоток СКВТ осуществляется от генератора 9 пере- менного напряжения. Блок 8 формирования управляющего сигнгша содержит фазочувствительньй выпрямитель 10 и его нагрузку 1 - индикатор или ис- цолнительньш механизм.
Устройство работает следующим образом.
Статорная обмотка СКВТ 2 соединена с роторной обмоткой СКВТ 1, что обеспечивает реализацию математичес
кой операции перемножения синусов углов крена d и сползания ft :
U sin о/ sin /3 ,
где и, - выходное напряжение схемы 5
умножения.
Роторные обмотки СКВТ 3 и 4 соединены последовательно и встречно, что
5 0 5
О
Q 5
0
5
обеспечивает реапиза1и-1Ю математической операции вычитания из выходных напряжений
Uj - и sin - - sin (T-C/ ),
где и и и - выходные напряжения
измерителей 3 и 4. Роторная обмотка СКВТ 2 соединена последовательно с роторными обмотками СКВТ 3 и 4, встречно с обмоткой СКВТ 3, поэтому результирующее напряжение на входе блока 8 будет
Е sin () - sine/ sin/i.
Это напряжение выпрямляется фа- зочувствительным выпрямителем 10 и поступает на нагрузку 11 - индикатор (при ручном вождении) или исполнительный механизм рулевого управления (при автоматическом вождении).
Погрешность измерения угла галопирования тч равна углу просадки с/ трактора. Разность этих углов является величиной, не зависящей от угла просадки (/ трактора, т.е. от его тягового сопротивления.
Конструктивно измерители углов крена о(. и галопирования -у могут быть выполнены в виде маятников, поворачивающих роторы СКВТ 1 и 3, Для измерения углов бокового сползания i и просадки с/ может использоваться дисковый самоустанавливающийся нож с поводком и чувствительными-элементами на СКВТ, измеряющими углы поворота поводка в горизонтальной и вертикальной плоскостях соответственно.
Формула, изобретения Устройство для вождения машинно- тракторного агрегата по горизонталям склонов, содержащее измерители углов крена, галопирования и бокового сползания трактора, схему умножения, первую схему сравнения, и блок формирования управляющего сигнала, отличающееся тем, что,.с целью повьшения точности вождения, оно снабжено измерителем угла просадки трактора и второй схемой сравнения, при этом измерители углов крена и бокового сползания трактора соединены через схему умножения с первым входом первой схемы сравнения, выход которой соединен с блоком формирования управляющего сигнала, а измерите314040054
ли углов галопирования и просадки сравнения с вторым входом первой схе- трактора соединены через вторую схему мы сравнения.
Фил.2
| Способ вождения машинно-тракторных агрегатов вдоль горизонталей склонов | 1984 |
|
SU1240372A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
