Изобретение относится к машиностроению и может быть использовано в автоматических манипуляторах.
Целью изобретения является повышение точности позиционирования за счет выборки зазоров в кинематических цепях манипулятора.
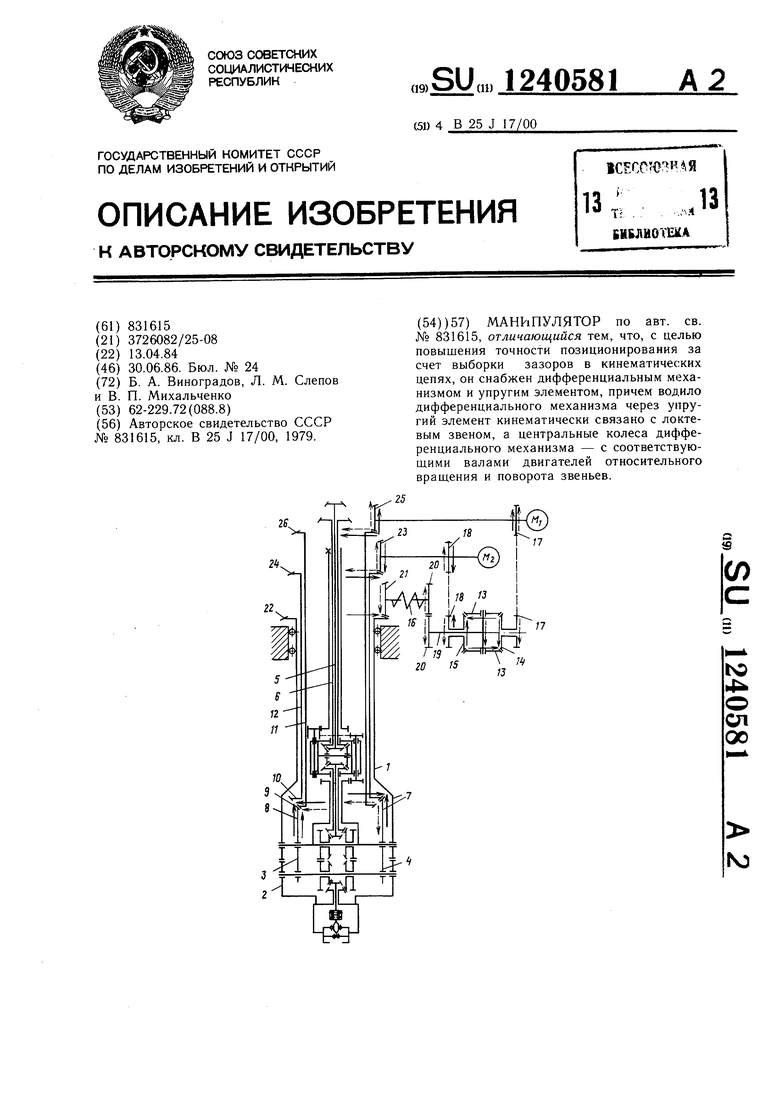
На чертеже изображена кинематическая схема манипулятора.
Манипулятор содержит локоть 1 и кисть
Поворот колес 23 и 25 в одном направлении вызывает поворот звеньев 3 и 4 в противоположных направлениях, соответственно реакция колеса 9 противоположно на- 5 правлена реакции колеса 10, что гарантирует отсутствие относительного поворота звена 2 и выбор зазоров в зубцах конических секторов 7 и 8, а также в цилиндрических секторах звена 2 как следствие замкнутого натяжения обеих цепей относительного поворо2, соединенные между собой водилом, выпол- ° та звена 2 (на чертеже направление повоненным в виде параллельных звеньев 3 и 4, установленных на поперечных осях. В локтевом 1 и кистевом 2 звеньях расположены независимые кинематические цепи 5 и 6 движений захвата с коническими дифференциалами и блоками конических и цилиндрических колес, одно из которых жестко связано с неподвижным звеном механической руки. На звеньях 3 и 4 закреплены зубчатые секторы 7 и 8, связанные с коническими колесами 9 и 10, закрепленными на валах 11 и 12 относительного поворота и враш,ения звеньев.
Манипулятор снабжен коническим дифференциалом с двумя сателлитами 13, связанными с центральными колесами 14 и 15, и пружиной 16, собранной с предварительной деформацией. При этом центральное колесо 14 через цилиндрическую пару колес 17 связано с первой цепью относительного поворота и вращения звеньев и с
15
20
25
рота приводных водил и зубчатых колес, а также водила и центральных колес дополнительного дифференциала при работе пружины, показаны пунктирными стрелками)
Изгиб шарнира, т. е. относительный поворот звеньев 1 и 2, осуществляется при одновременной работе двигателей Mi и М2, вращающих в разные стороны валы И и 12 с сидящими на их концах шестернями 9 и 10, которые с помощью зубчатых секторов 8 и 7 поворачивают звенья 3 и 4 в одну сторону. Последние, в свою очередь, производят разворот кисти 2 относительно локтя 1 (на чертеже направление вращения зубчатых колес и приводных водил, а также сателлитов и центральных колес дополнительного дифференциала при относительном повороте звеньев показаны сплошными стрелками). Е следствие обкатки зубчатых блоков
первым двигателем Mi, центральное колесо JQ при изгибе кинематические цепи 5 и б враще15 через цилиндрическую пару колес 18 - с второй цепью относительного поворота и вращения звеньев и с вторым двигателем М2, а водило 19 через цилиндрическую пару колес 20, пружину 16 и коническую пару колес 21 и 22 - с локтевым звеном 1, уста- 35 новленным на опоре качения.
Устройство работает следующим образом.
Закрученная перед сборкой и установленная в кинематическую цепь дифференциала пружина 16, раскручиваясь, поворания захвата и перемещения губок захвата остаются неподвижными.
При вращении звеньев 1 и 2 в одну сторону при одновременной работе приводных двигателей Mi и М2 звенья 3 и 4 водила стремятся развернуться в противоположные стороны, но поскольку это невозможно, так как они связаны с поперечной осью, то относительного смещения сцепленных между собой зубьев колеса 9 и сектора 8, а также колеса 10 и сектора 7 не происходит, а прочивает все три кинематические цепи, связан- 40 исходит совместное вращение звеньев 1 и 2 в ные дифференциалом, на величину боковогосторону вращения валов II и 12 под деистзазора между зубцами колес, выбирая люфты всех зубчатых соединений обеих цепей относительного поворота и вращения звеньев и цепи локтевого 1 звена вращения. Пружина 16 поворачивает колесо 21 в одном направлении, а через дифференциал колеса 23, 24 и 25, 26 - в противоположном направлении, соответственно, реакция колеса 22 будет направлена противоположно реакциям колес 24 и 26, что гарантирует отсут- 50 включении ствие вращения звена 1 и выбор зазоров в зубцах колес как следствие замкнутого натяжения трех кинематических цепей.
вием суммарной мощности двигателей Mi и М2.
Манипулятор может работать при включе« д НИИ одного или двух двигателей М и М .
При разностороннем и одновременном включении обоих двигателей, а также при включении одного двигателя происходит относительный поворот звеньев.
При одностороннем и одновременном обоих двигателей происходит вращение звеньев. При этом происходит выбор зазоров во всех зубчатых соединениях кинематических цепей.
Составитель Е. Ермолаев
Редактор Л. ВеселовскаяТехред И. ВересКорректор О. Луговая
Заказ 3437/11Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4
Поворот колес 23 и 25 в одном направлении вызывает поворот звеньев 3 и 4 в противоположных направлениях, соответственно реакция колеса 9 противоположно на- правлена реакции колеса 10, что гарантирует отсутствие относительного поворота звена 2 и выбор зазоров в зубцах конических секторов 7 и 8, а также в цилиндрических секторах звена 2 как следствие замкнутого натяжения обеих цепей относительного поворота звена 2 (на чертеже направление повота звена 2 (на чертеже направление пово
рота приводных водил и зубчатых колес, а также водила и центральных колес дополнительного дифференциала при работе пружины, показаны пунктирными стрелками)
Изгиб шарнира, т. е. относительный поворот звеньев 1 и 2, осуществляется при одновременной работе двигателей Mi и М2, вращающих в разные стороны валы И и 12 с сидящими на их концах шестернями 9 и 10, которые с помощью зубчатых секторов 8 и 7 поворачивают звенья 3 и 4 в одну сторону. Последние, в свою очередь, производят разворот кисти 2 относительно локтя 1 (на чертеже направление вращения зубчатых колес и приводных водил, а также сателлитов и центральных колес дополнительного дифференциала при относительном повороте звеньев показаны сплошными стрелками). Е следствие обкатки зубчатых блоков
при изгибе кинематические цепи 5 и б вращепри изгибе кинематические цепи 5 и б вращения захвата и перемещения губок захвата остаются неподвижными.
При вращении звеньев 1 и 2 в одну сторону при одновременной работе приводных двигателей Mi и М2 звенья 3 и 4 водила стремятся развернуться в противоположные стороны, но поскольку это невозможно, так как они связаны с поперечной осью, то относительного смещения сцепленных между собой зубьев колеса 9 и сектора 8, а также колеса 10 и сектора 7 не происходит, а происходит совместное вращение звеньев 1 и 2 в сторону вращения валов II и 12 под деиствключении
вием суммарной мощности двигателей Mi и М2.
Манипулятор может работать при включе« НИИ одного или двух двигателей М и М .
При разностороннем и одновременном включении обоих двигателей, а также при включении одного двигателя происходит относительный поворот звеньев.
При одностороннем и одновременном обоих двигателей происходит вращение звеньев. При этом происходит выбор зазоров во всех зубчатых соединениях кинематических цепей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулирующее устройство | 1983 |
|
SU1113973A1 |
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Шарнирное соединение звеньев манипулятора | 1978 |
|
SU699748A2 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Манипулятор | 1982 |
|
SU1013260A1 |
| ПРИВОД | 1991 |
|
RU2016288C1 |
| Приводной механизм с переключением передачи | 2018 |
|
RU2675753C1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
