(54) ПРИВОД ЗАХВАТА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод захвата манипулятора | 1979 |
|
SU874333A2 |
| Привод захвата манипулятора | 1975 |
|
SU549333A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Привод захвата манипулятора | 1976 |
|
SU607730A1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Привод схвата манипулятора | 1977 |
|
SU672013A1 |
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| Привод клети стана холодной прокатки труб | 1989 |
|
SU1729637A1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
I
Изобретение относится к машииостроению,а именно к копирующим манипуляторам.
Известен привод захвата манипулятора Через суставы, содержащий конические диффереициалы, установленные на поперечных осях суставов 1.
Недостатком такого привода захвата манипуля тора является то, что при изгибе сустава в кинематической цепи привода захвата появляется наложенное движение за счет обкатки конических колес звеньев по коническому колесу, установленному на поперечной оси изгиба сустава.
Наиболее близким техническим решением к предлагаемому является привод захвата манипулятора через суставы с поперечными осями, содержащий центральные стержни, несущие рейки, консольно закрепленные на их концах и смонтированные с возможностью поступательного перемещения вдоль продольных реей соединенных суставами звеньев (2.
Однако такой привод захвата манипулятора довольно сложен и имеет больщие габариты вследствие иеобходимости наличия в суставе двух осей изгиба.
Целью изобретения является упрощение кон- струкции и уменьшение габаритов.
Это достигается тем, что дифференциал каждого сустава снабжен рычагом с ползуном и зубчатыми секторами, смонтированными на его центральном колесе и кинематически связанными с рейками стержней, водило дифференциала закреплено на поперечной оси сустава, а рычаг расположен перпендикулярно зтой оси и шарнирно сочленен с помощью щатунов равной длины со звеньями, при этом точки сочленения шумов со звенья: ми, расположены на равных расстояниях от про.-, дольных,реей. звеньев.
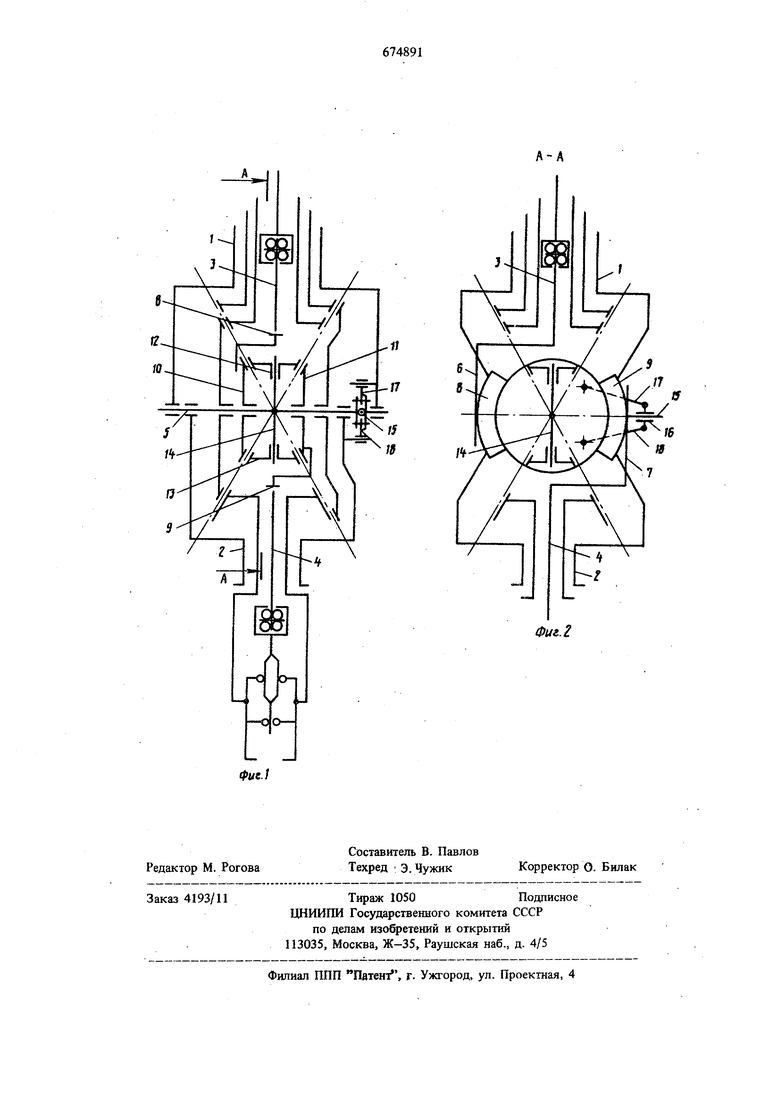
На фиг. 1 дана кинематическая схема привода; на фиг. 2 - разрез А-А на фиг. 1.
Привод захвата манипулятора содержит корпус локтевого звена 1, корпус кистевого звена 2, центральный стержень 3, установленный с возможностью возвратно-поступательного перемещения вдоль оси корпуса звена 1, центральный стержень 4, аналогично установленный в звене 2. Корпусы звеньев 1 и 2 щарнирно соединены между собой поперечной осью 5 сустава. На концах центральных стержней 3 и 4 консольно закреплемы соответственно зубчатые рейки 6 и 7, взаимо действующие с зубчатыми цилиндрическими Секторами 8 и 9, закрепленными на централыгых ко лесах 10 и 11 конического дифференциала, смонтированных на поперечной оси 5 и взгшмодейству ющих между собой через посредство сателлитов 12 и 13, смонтированных на водила 14. Водило 14 жестко закреплено на поперечно реи 5. Да поперечной оси 5, перпендикулярно к ней также Ькестко закреплен рьиаг 15..т. На рычаге 15 размещен ползун 16, шарнирно-,, сочлененный с корпусами звеньев 1 и 2 с помощью шат5Т10в 17 и 18 равной длины. Точки сочленения шатунов l7jH 18 со звеньями 1 и 2 расположены на равных расстояниях от продольньЬс осей этих звеньев., , L . ,1 Привод захвата манипулятора pa6oTraet следующим образом. . При перемещении центрального стержня 3 с консольно закрепленной на нем зубчатой рейкой 6 вниз происходит поворот зубчатого цилиндрического сектора 8 и центрального коле 10. Центральное колесо 10 вращает сателлиты 12 и 13, смонтированнью на водиле 14, удерживаемом от вращения рычагом 15, ползуном 16 и шатунами 17 и 18. , Сателлита 12 и 13 врЩа отцен рЙлШоё койическое колесо 11 с закрепленным на нем з)йчатым цилиндрическим сектором 9 в сторону, прО тЙЖйбЙ№ аг$ю йап|Ш ёйШй|)йдайШШ ального колеса 10, вызывая тем самым йё рёмещение зубчатой рейки 7 и центрального стержня 4 вниз. Таким образом осуществляется йрйвод захватаМанипулятора через сустав. При изгибании взаймйое положение звеньев меняется и поэтому ползун 16, связанный С корпусами звеньев 1 и 2 шатунами 17 и 18, бзгдёт перемещаться вдоль рычага 15, жёйко связанного с водалом поп)ечной осью 5. Одновременно будет происходить изменение угла между рычагом 15 и Ц(ентральш.ши ст)кми 3 и 4, а следовательно, и поворот водила 14. Бйа бдаря тому, что водило 14 кинематически связано с корпусами звеньев 1 и 2 р1шйеШй ШДЯШё другдругу шатунами 17 и 18 чер йе ёдешг йолзуна 16 и закрепленного на поп ечной оси 5 рьпага 15, водило l4 будет всегда поворачивать;
.i:;-.-4-.i : ::KC ieS:« SSi.-.- S:SS5V rg; 33 S 5:St::i : -:i ;;ся на угол, равный половине угла изгиба сустава. Так, например, если сустав изогнется на 90°, то водило 14 повернется от исходного положения на 45°, а такой поворот водила необходим для чтобы центральные зубчатые колеса 10 и 11 при изгибе сустава, обкатываясь по сателлитам 12 и 13, оставались неподвижными относительно соответствующих корпусов звеньев 1 и 2 (колесо 10 - относительно корпуса звена 1, а колесо 11 - относительно корпуса звена 2), а следовательно, чтобы зубчатые рейки 6 и 7 и центральные стерядаи 3 и 4 оставались неподвижньши и тем самым обеспечивалась kiraiiviaTmecКая независимость привода захвата при изгибании сустава. Формула изобретения 11ривод захватг1 манипулятора через его суставы, имеющие поперечные оси, содержащий центральные стержни, несущие рейки, консольно закрепленные на их концах и смонпфойанныё с возможностью поступательного перемещения вдоль продольных:;6с%соединенных суставами звеньев, н конические дафференциаль, установrtlHHbie на поперечньрс осях, отличающийся темГ что, с целью упрощения конструкции и умёшшёнед габаритов, даффёренциал каждого сустава снабжен рычагов с ползуном и зубчаты- , ми секторами, (яионтированньши на его централь-ном колесе я кинематически связаш1ьш1и С рейками стфжней, ВОДШ10 дафферешшала закреплено на itoneperaoi) осп сустава, а рычаг расположен п« пендакулярно этой оси и щарнирно сочленен с помощью шатунов равной длины со звеньями, при этом точки сочленения щатунов со звеньями расположень на равных расстояниях от продольных осей этих звеньев. Источники Информации, принятые во внимание при экспертизе, 1.Ашфеянко С. Н. и др. Проектирование приводов Манипуляторов. Л., Мащиностроение, 1975, с. 27, р. 2.1. 2.Авторское свидетельство СССР N° 549333, кл. В 25 $ 17/00, 1975.
Фи.2
