Изобретение относится к транспортному машиностроению, а именно к механизмам стабилизации положения транспортных средств, преимущественно наземных, предназначенных для работы в условиях горного рельефа на естественных склонах.
Цель изобретения - упрощение конструкции.
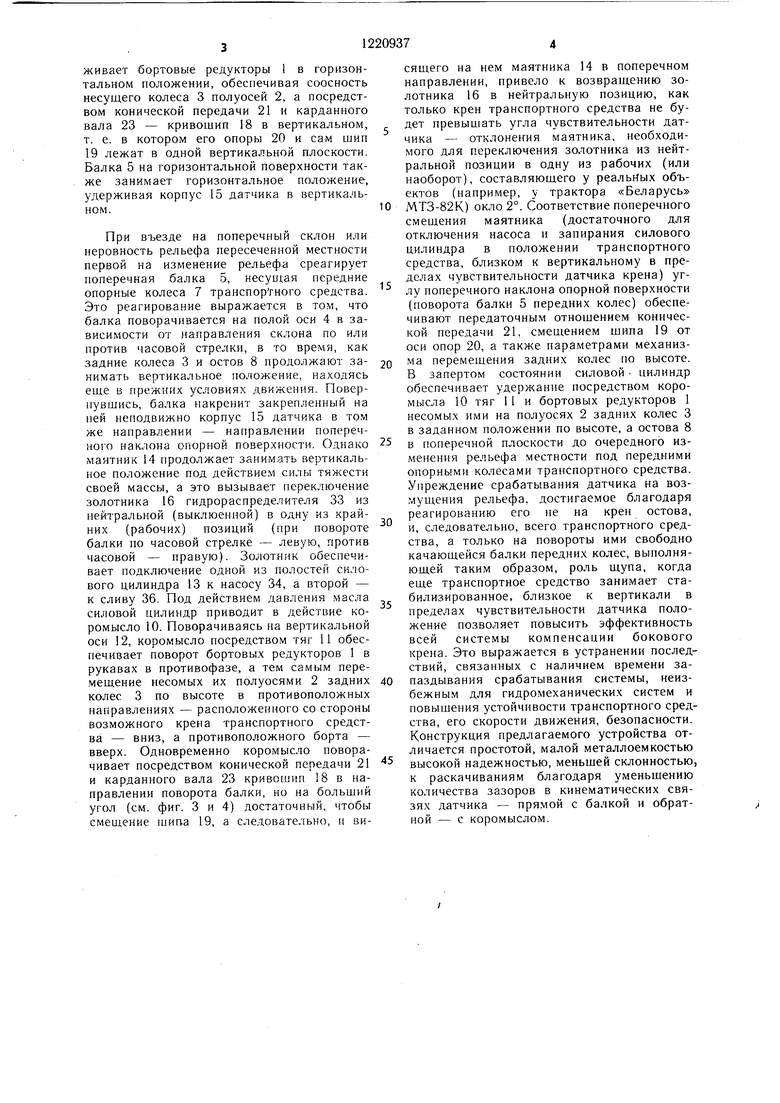
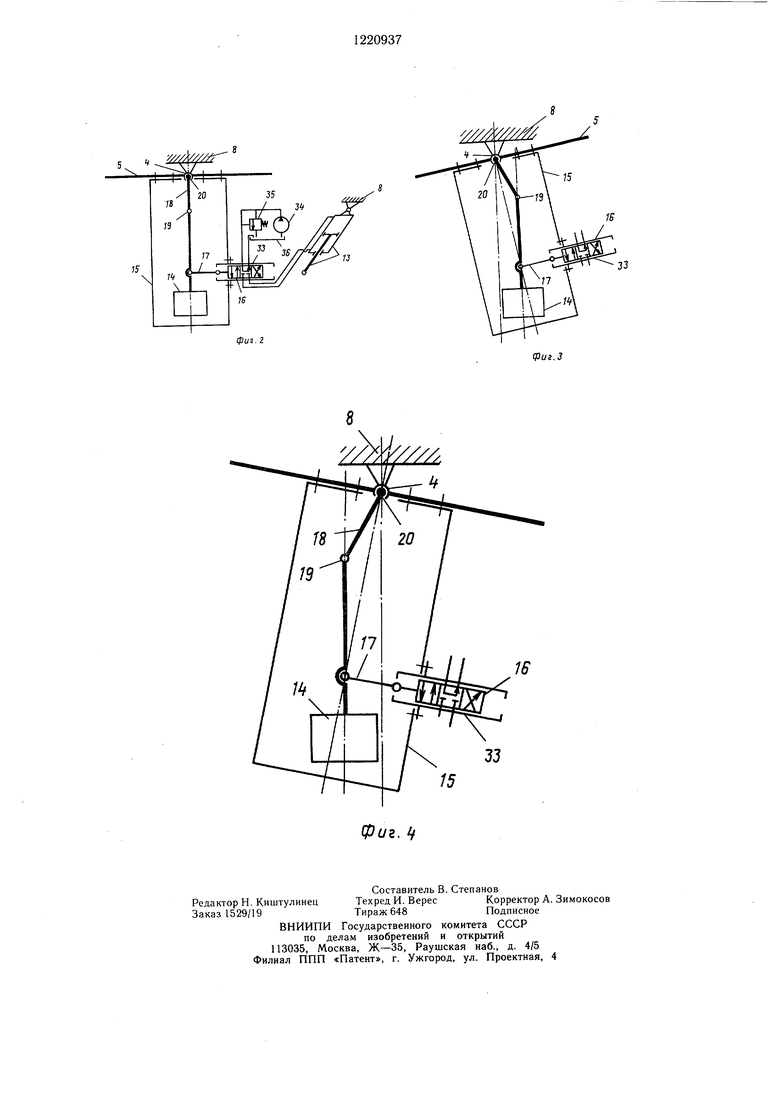
На фиг. 1 показана схема устройства; на фиг. 2 - маятник, исходное положение; на фиг. 3 - то же, положение при крене в одну сторону; на фиг. 4 - то же, в другую сторону.
Устройство компенсации бокового крена транспортного средства со;|,ержит поворотные бортовые редукторы 1 для принудительного согласованного нере.мещения несо.мых имя на полуосях 2 задних всду.,их колес 3 но высоте синхронно в противоположных на- нравлепиях и свободно качаю;цу ося на горизонтальной оси 4 поперечную балку 5, несущую на поворотных цапсЬах 6 перед- н.ие направляющие колеса 7 н обеспечивающую самостоятельное копирозание ими рельефа onopiiofi поверхности. Бортовые редукторы 1 поворотно установлены на остове 8 транспортного средства посредством cnociiO раепо;1ожекных по его бортам pyxaiiO 5 9. Для согласованного поворота (1едуктор«н в противофа: е осуществляющий его привод выполнен на основе равноплечего коромысла 0, связанного с ними свомм.ч концами посредством продольных тяг 11 и установленного на остове с возможностью поворота на вертикальной оси 12 силовым цилиндром 13, управл5№мым в зависимости от угла наклона опорной поверхности датчиком крена маятником 14, под- вещенным в отдельном корпусе 15 и соединенным с золотником 16 распределителя щарнирпой тягой 17. Прямую задающую связь, необходимую для реагирования датчика крена на возмущающий сигнал - наклон опорной поверхности или ее неровности, обеспечивает крепление его корпуса 15 на свободно качающейся балке 5. Обратную следяш.ук) св.чзь, необходимую для прекращения реагирова1шя датчика крепа после того, как остов 8 транспортного средства будет возвращен бортовыми редукторами 1 в вертикальное положение, т. е. будет компенсирован его крен, который стремились вызвать неровности опорной поверхности или ее обгций наклон, обеспечивает выпол- епие оси подвеса маятк ика 54 в виде кривошипа 18 и связь его с приводом поворота редукторов. Шип 19 щарнирно связан с маятником 14, а его опоры 20 - с корпусом 15 с возможностью поворота кривошипа на них в корпусе. При этом оси шипа и опор ориентированы в направлении продольной оси-транспортного средства, параллельной горизонтальной оси 4 качания балки передних колее, обеспечивая качание маятника 14 и смещение оси его подвеса
при повороте кривошипа строго в поперечной плоскости. Кинематическая связь кривошипа с приводом разворота бортовых редукторов вьпюлнена посредством конической зубчатой передачи 21, ведущее колесо которой (шестерня) закреплено на коромысле 10 соосно оси его поворота, а ведомое установлено на остове с возможностью вращения в опоре 22 и связано с хвостовиком обращенной в сторону коромысла опоры 20 кривошипа сдвоенным карданным валом 23, пропущенным сквозь выполненную полой ось 4 балки передних колес.
Дли поддержания передних колес 7 в вертикальном положении при качании балки несущие их цапфы 6 установлены на балке посредством поворотных в поперечной плоскости вертикальных рычаг ов 24, связанных с ними своими нижними концами, а верхними с поперечной тягой 25.
Тяга 25 средней своей частью шарнирио
установлена на остове с возможностью качания в поперечной плоскости вокруг горизонтальной оси 26, лежащей в одной вертикальной плоскости с осью кач,зния балки. При этом балка 5, тяга 25, остов 8 и оба вертикальных рычага 24 обрзуют шармирный параллелограммньгч многозвенник. Для обеспечения согласованного поворота направляющих колес 7 совместно с несущими их цапфами 6, поворотно установ- леппы.ми на нижних концах вертикальных рычагов 24. цапфы снабжены рулевой тр; ,- пецией 27, подсоединенной к сотке 28 рулевого привода. Рулевой привод выполпе па основе конической зубчатой передачи 29, ведущее колесо (шестерня) которой связано карданным валом 30 с установленным на рабочем месте водителя рулевым колесом 31, а ведомая - вертикальным валом 32 с упомянутой сошкой 28;
Силовой цилиндр 13 подк.:1ючен к гидросистеме транспортного средства через управляемый маятником гидрор аонределитель
33, золотник 16 которого связан с маятником тягой 17 щарнирно. Гидросистема транспортного средсп ва включает в себя источник давления масла (насос 34) с нерепускным клапаном 35 в нагнетателыюй магистрали для ограничения максимального давления
и слив 36.
Устройство работает следующим образом.
При движении транспортного средства
по гладкой горизонтальной поверхности
устройство находится в выключенном состоянии, поскольку транспортное средство само по себе так же, как и маятник 14 занимает вертикальное положение. При этом маятник удерживает золотник 16 в нейтральной позиции, обеспечивающей подключение насоса 34 на слив и запирание полостей
силового цилиндра 13, обеспечивая блокирование им коромысла 10 в среднем по- ложепии (строго, поперечно). В этом поло- жении посредством тяг 11 коро.мысло удер
живает бортовые редукторы 1 в горизонтальном положении, обеспечивая соосность несущего колеса 3 полуосей 2, а посредством конической передачи 21 и карданного вала 23 - кривошип 18 в вертикальном, т. е. в котором его опоры 20 и сам шип 19 лежат в одной вертикальной плоскости. Балка 5 на горизонтальной поверхности также занимает горизонтальное положение, удерживая корпус 15 датчика в вертикальном.
При въезде на поперечный склон или неровность рельефа пересеченной местности первой на изменение рельефа среагирует поперечная балка 5, несущая передние опорные колеса 7 транспор гного средства. Это реагирование выражается в том, что балка поворачивается на полой оси 4 в зависимости от направления склона по или против часовой стрелки, в то время, как задние колеса 3 и остов 8 продолжают за- нимать вертикальное положение, находясь еще 13 прежних условиях движения. Повер- 11увшись, балка накренит закрепленный на пей неподвижно корпус 15 датчика в том же направлении - направлении поперечного наклона опорной поверхности. Однако Маятник 14 пролтолжает занимать вертикальное положение под действием си.чы тяжести своей массы, а это вызывает переключение золотника 16 гидрораспределителя 33 из нейтральной (выклюенной) в одну из крайних (рабочих) позиций (при повороте балки по часовой стрелке - левую, против часовой - правую). Золотник обеспечивает подключение одной из полостей силового цилиндра 13 к насосу 34, а второй - к сливу 36. Под действием давления масла силовой цилиндр приводит в действие коромысло 10. Поворачиваясь на вертикальной оси 12, коромысло посредством тяг 11 обеспечивает поворот бортовых редукторов 1 в рукавах в противофазе, а тем самым пере- .мещение несомых их полуосями 2 задних колес 3 по высоте в противоположных направлениях - расположенного со стороны возможного крепа транспортного средства - вниз, а противоположного борта - вверх. Одновременно коро.мысло поворачивает посредством конической передачи 21 и карданного вала 23 кривошип 18 в направлении поворота балки, но на больший угол (см. фиг. 3 и 4) достаточный, чтобы смещение ,а 19, а следовательно, н висящего на нем маятника 14 в поперечном направлении, привело к возвращению золотника 16 в нейтральную позицию, как только крен транспортного средства не будет превышать угла чувствительности датчика - отклонения маятника, необходимого для переключения золотника из нейтральной позиции в одну из рабочих (или наоборот), составляющего у реальных объектов (например, у трактора «Беларусь МТЗ-82К) окло 2°. Соответствие поперечного смещения маятника (достаточного для отключения насоса и запирания силового цилиндра Б положении транспортного средства, близком к вертикальному в пределах чувствительности датчика крена) углу поперечного наклона опорной поверхности (поворота балки 5 передних колес) обеспечивают передаточным отнощением конической передачи 21, смещением шипа 19 от оси опор 20, а также параметрами механизма перемещения задних колес по высоте. В запертом состоянии силовой цилиндр обеспечивает удержание посредством коромысла 10 тяг 11 и бортовых редукторов 1 несомых ими на полуосях 2 задних колес 3 в заданном положении по высоте, а остова 8 в поперечной плоскости до очередного изменения рельефа местности под передними опорными колесами транспортного средства. Упреждение срабатывания датчика на возмущения рельефа, достигаемое благодаря реагированию его не на крен остова, и, следовательно, всего транспортного средства, а только на повороты ими свободно качающейся балки передних колес, выполняющей таким образом, роль щупа, когда еще транспортное средство занимает стабилизированное, близкое к вертикали в пределах чувствительности датчика положение позволяет повысить эффективность всей системы компенсации бокового крена. Это выражается в устранении последствий, связанных с наличием времени запаздывания срабатывания системы, неизбежным для гидромеханических систем и повышения устойчивости транспортного средства, его скорости движения, безопасности. Конструкция предлагаемого устройства отличается простотой, малой металлоемкостью высокой надежностью, меньшей склонностью, к раскачиваниям благодаря уменьшению количества зазоров в кинематических связях датчика - прямой с балкой и обратной - с коромыслом.
w/)////r
(риг. 2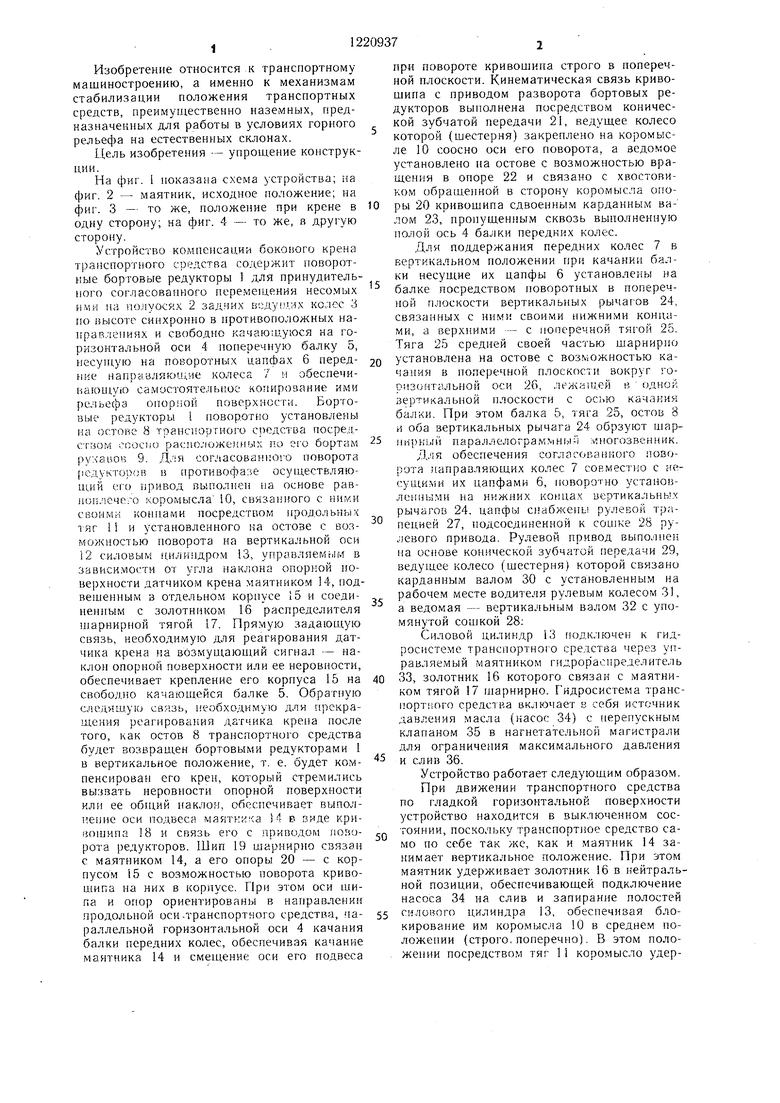
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| Система управления положением остова транспортного средства | 1985 |
|
SU1324872A1 |
| Механизм выравнивания крутосклонного трактора | 1980 |
|
SU893594A1 |
| Пропашной трактор для работы на склонах | 1987 |
|
SU1518151A1 |
| Транспортное средство повышенной проходимости | 1983 |
|
SU1133127A1 |
| Устройство стабилизации крутосклонного трактора | 1979 |
|
SU992016A1 |
| Механизм выравнивания крутосклонного трактора | 1981 |
|
SU1031800A2 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
| Транспортное средство повышенной проходимости | 1987 |
|
SU1458252A1 |

16
3J
15
Составитель В. Степанов
Редактор Н. КиштулинецТехред И. ВересКорректор А. Зимокосов
Заказ 1529/19Тираж 648Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Фиг. If
| Устройство стабилизации крутосклонного трактора | 1979 |
|
SU992016A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
