Изобретение относится к судостроению, в частности к устройствам траверзной передачи груза.
Целью изобретения является увеличение грузоподъемности.
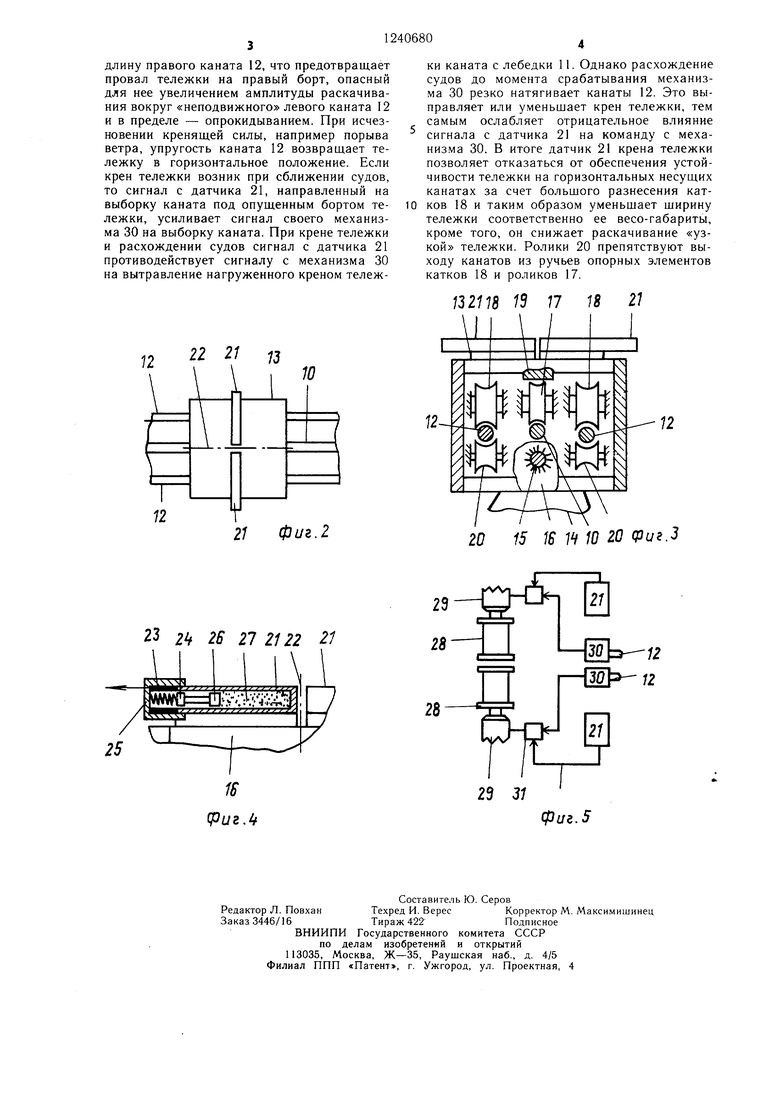
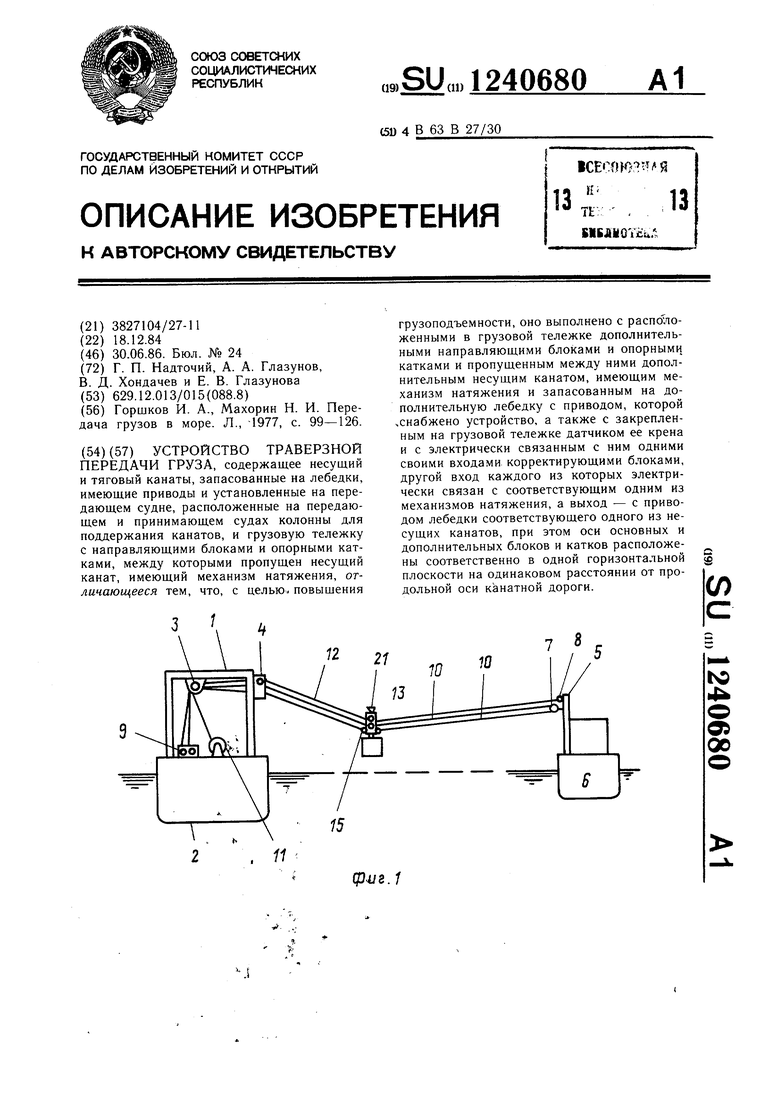
На фиг. 1 изображено устройство, вид с кормы судна; на фиг. 2 - канатная дорога, вид сверху; на фиг. 3 - вид на грузовую тележку в направлении ее движения по канатной дороге; на фиг. 4 - датчик крена тележки; на фиг. 5 - электрическая схема компенсации крена тележки.
Устройство включает колонну 1, установленную на передающем судне 2, четырех- ручьевой направляющий блок 3 на колонне 1 и передающую головку 4, колонну 5, установленную на принимающем судне 6, блок 7 и замок 8, закрепленные на колонне 5, двухбарабанную лебедку 9 тягового каната 10, основную и дополнительную лебедки 11 несущего каната 12, грузовую тележку 13 с грузовым захватом 14, при этом тяговый канат 10 состоит из ветви, соединенной в рабочем положении устройства с замком 15 на торцовой стенке 16 грузовой тележки 13, пропущенной через головку 4 и блок 3 на барабан лебедки 9, и ветви, соединенной замком 15 с противоположной стенкой 16, тележки, пропущенной через неподвижный блок 7 на приемной колонне 5 принимающего судна 6 и далее возвращенной через ролик 17 в тележке на второй барабан лебедки 9, причем вторая ветвь расположена над первой ветвью в вертикальной плоскости, проходящей через ролик 17. Несущий канат 12 имеет две параллельные между собой линии идентичных основного и дополнительного канатов, расположенные в горизонтальной плоскости, односторонние концы линий соединены замками 8 с колонной 5 принимающего судна 6, канаты линий пропущены через ручьи катков 18 в грузовой тележке 13, свободные ручьи блока 3 запасованы каждый на свою однобарабанную лебедку И. Торцовые стенки 16 грузовой тележки 13 в рабочем положении устройства ориентированы поперек направления движения тележки по канатной дороге. В середине тележки размещены продольное ребро 19 и ролик 17 верхней ветви каната 10, с боков ребра симметрично расположены опорные катки 18 и ограничивающие перемещение каната 12 в ручьях катков ролики 20. В стенках 16 выполнены проходы для канатов 10 и 12. На крыше тележки 13 закреплен датчик 21 крена тележки, состоящей из двух длинных соосных цилинров, установленных поперек тележки, обращенных друг к другу, днища которых расположены около продольной плоскости 22 симметрии тележки, в противолежащих концах цилинров установлены реостаты 23 с ползунами 24, опертыми на предднищевые пружины 25. Ползуны жестко соединены с уплотнительными золотниками 26. В пространство между золотником 26
5
5
и днищами цилиндров залита ртуть 27. Канатные барабан1 1 28 лебедок 11 выполнены кинематически независимыми друг от друга с индивидуальными приводами 29. Схема управления устройства включает механизмы 30 натяжения, установленные в обеих линиях несущих канатов, сигналы с которых через корректирующие блоки 31 заведены на блоки управления (не показаны) барабанов 28, при этом блоки 3 подключены
0 к реостатам датчика 21.
Устройство работает следующим образом. На тележку 13, находящуюся у передающей головки 4, при помощи захвата 14 подвешивается груз. В работу включается лебедка 9, один барабан которой начинает выбирать ветвь тянущего каната 10, а другой - стравливать. В результате возникает перемещение замков 15, а вместе с ним и тележки 13 с грузом от передающего судна 2 к принимающему судну 6. При перемещении
0 тележка 13 скользит катками 18 по двум натянутым между судами несущим канатам 12, при этом вес распределяется между канатами, что снижает в них напряжения и, следовательно, допускает дополнительную нагрузку канатов. После подхода к судну 6 груз отсоединяется от тележки и оставляется на судне. Лебедка 9 меняет направление вращения барабанов, что приводит к перемещению тележки 13 в исходное положение на судно 2. Механизмы 30 натяжения при отсутствии бортовой качки тележки 13 работают следующим образом. Если расстояние между судами уменьщается, то оба каната 12 одинаково провисают, это снижает натяжение в них и служит сигналом на одновременную и одинаковую выборку канатов барабанами 28 лебедок 11. При расхождении судов канаты 12 одинаково натягиваются и механизмы 30 генерируют сигнал на привод вращения лебедок 11 для синхронного стравливания их. В результате работы механизмов 30 канаты 12 предохраняются от раз0 рыва, а тележка 13 - от недопустимого приближения к водной поверхности. При отсутствии крена тележки датчик 21 и блоки 31 не работают.
Пусть тележка получает правый крен и при этом суда находятся на расстоянии друг от друга, при котором сигналы от механизмов натяжения 30 в обеих линиях канатов 12 равны 0. Тогда крен тележки натягивает правый канат 12 и правый механизм 30 вырабатывает сигнал на стравливание правого каната 12. Одновременно со срабатыванием правого механизма 30 срабатывает правый датчик 21. Ртуть в нем приливается к золотнику 26 на опущенном борту тележки, золотник вдвигает ползун 24 в реостат 23, что приводит к возникновению в
5 правом блоке 31 сигнала, направленного навстречу сигналу с правого механизма 30. Тем самым сигнал с правого механизма 30 не проходит :На его лебедку 11 и не изменяет
0
5
5
0
длину правого каната 12, что предотвращает провал тележки на правый борт, опасный для нее увеличением амплитуды раскачивания вокруг «неподвижного левого каната 12 и в пределе - опрокидыванием. При исчезновении кренящей силы, например порыва ветра, упругость каната 12 возвращает тележку в горизонтальное положение. Если крен тележки возник при сближении судов, то сигнал с датчика 21, направленный на выборку каната под опущенным бортом тележки, усиливает сигнал своего механизма 30 на выборку каната. При крене тележки и расхождении судов сигнал с датчика 21 противодействует сигналу с механизма 30 на вытравление нагруженного креном тележки каната с лебедки 11. Однако расхождение судов до момента срабатывания механизма 30 резко натягивает канаты 12. Это выправляет или уменьщает крен тележки, тем самым ослабляет отрицательное влияние сигнала с датчика 21 на команду с механизма 30. В итоге датчик 21 крена тележки позволяет отказаться от обеспечения устойчивости тележки на горизонтальных несущих канатах за счет большого разнесения кат- ков 18 и таким образом уменьщает щирину тележки соответственно ее весо-габариты, кроме того, он снижает раскачивание «узкой тележки. Ролики 20 препятствуют выходу канатов из ручьев опорных элементов катков 18 и роликов 17.
22 21 ;j
Li
10
21 фиг.2
132118 13
Р
20 15 IS 1 Ю 20 Фиг.З
23 2 26 27 2122 21
29 37
фиг. 5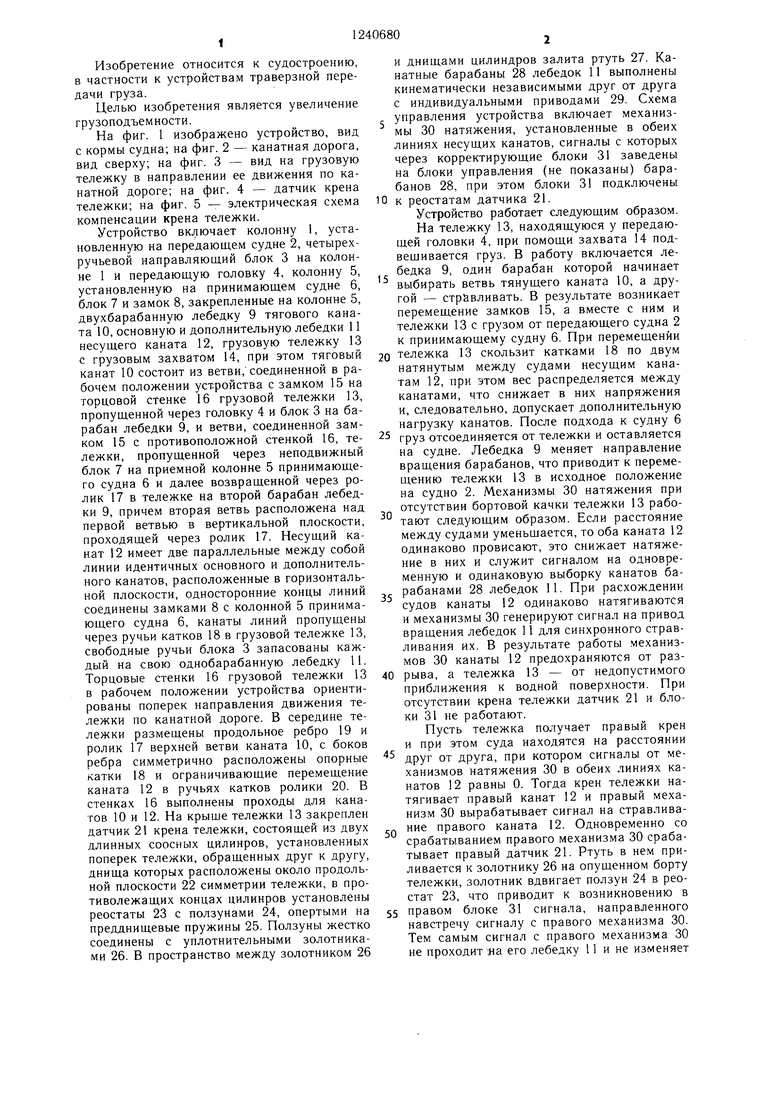
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Судовая канатная дорога | 1977 |
|
SU677989A1 |
| Подъемно-спусковое сооружение верфи для судов | 1977 |
|
SU735481A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| Устройство для швартовки и протяжки судов вдоль причала | 1989 |
|
SU1785943A1 |
| Горшков И | |||
| А., Махорин Н | |||
| И | |||
| Передача грузов в море | |||
| Л., -1977, с | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
