(54) СУПРВАЯ КАНАТНАЯ ПОРОГА

| название | год | авторы | номер документа |
|---|---|---|---|
| Лебедка для передачи грузов с судна на судно | 1977 |
|
SU695958A1 |
| Система передачи грузов с судна на судно | 1982 |
|
SU1041402A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
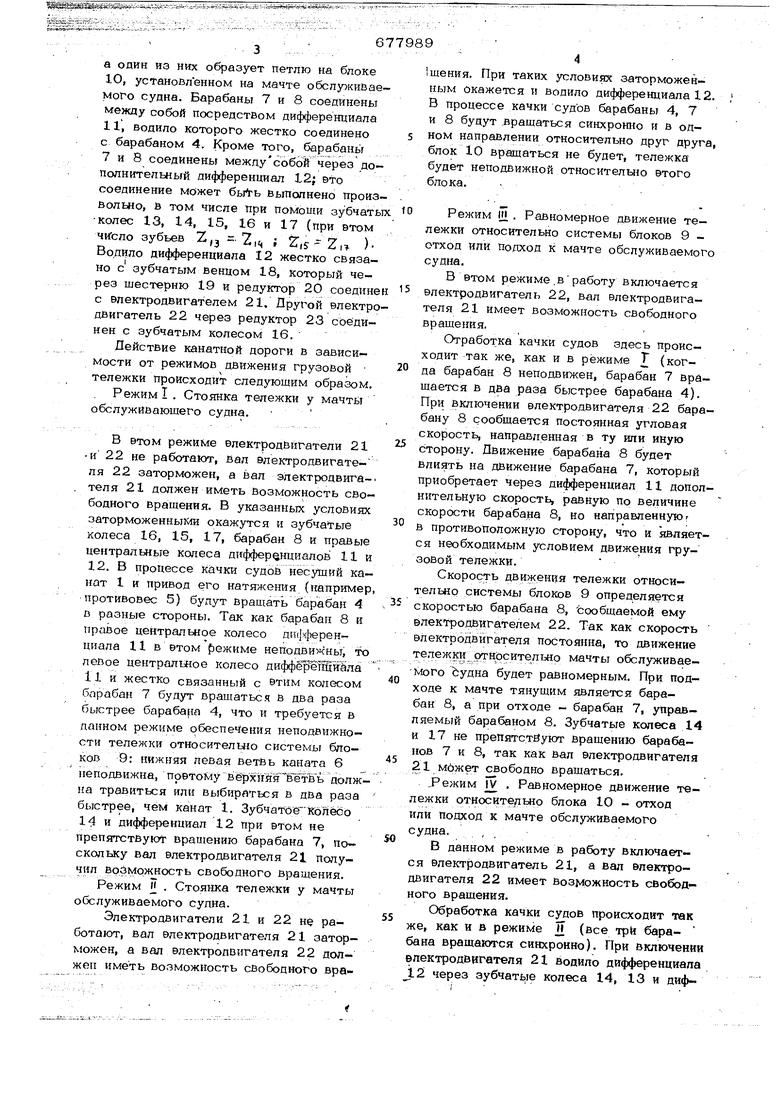
Изобретение относится к погрузочно- разгрузочным устройствам, a именно, к судовым канатным дорогам. Известно устройство для натяжения грузового каната, содержащее две фрикционные и две зубчатые м;,фтыС11. Недостатком указанного устройства является болыцое число переключений. Наиболее близким решением из известных является судовая канатная доро га, содержащая одну следящую две тяговые лебедки, a также дифференциал соединяющий барабаны тяговых лебедок Недостатком указанной канатной дороги являете я наличие зубчатой муфты, вызывающей резкие переходы переключения на ходу для смены режимов работы. Сцепление муфт на ходу (при враще нии валов) приводят к Возникновению ударных нагрузок, к повьтщению износа муфт II, в конечном итоге, к понижению надежности всей конструкции. Целью изобретения является повьтще. ние плавности при работе и надежности устройства. Указанная цель достигается тем, что предлагаемое устройство снабжено дополнительным дифференциалом, центральные щестерни которого кинематически связаны с барабанами тяговых лебедок посредством зубчатых колес. Сущность изобретения поясняется чер-. тежом. Несущий канат 1 грузовой тележки 2 одним концом закреплен на мачте 3 обслуживаемого судна, a другим - запасован на барабане 4 следящей лебедки. Привод следящей лебедки (т.е. привод натяжения несущего каната) может быть гидравлическим, пневматическим н т.п., или грузовым с противовесом 5. Тяговые канаты 6, запасованные на барабанах 7 и 8, своим другим концом закреплены к грузовой тележке, при втом оба каната, как к несущий, проходят через сисгему блоков 9 обслуживающего судна, а один из них образует петлю на блоке 10,установленном на мачте обслуживае мого судна. Барабаны 7 и 8 соединены между собой посредством дифференциала 11,водило которого жестко соединено с барабаном 4, Кроме того, барабаны 7 и 8 соединены междусобой через дополнительный дифференциал 12; это соединение может выполнено произ вольно, в том числе при помоши зубчаты колес 13, 14, 15, 16 и 17 (при втом число зубьев Z, - 2,;, ; Z, Z, ) Водило дифференциала 12 жестко связано с зубчатым венцом 18, который через шестерню 19 и редуктор 20 соедине с электродвигателем 21. Другой электро двигатель 22 через редуктор 23 соединен с зубчатым колесом 16. Действие канатной дороги в зависимости от режимов движения грузовой тележки происходит следующим образом. Режим I . Стоянка тележки у мачтЫ обслуживающего судна. В ВТОМ режиме электродвигатели 21 а 22 не работают, Вал электродвигателя 22 заторможен, а вал электродвигателя 21 должен иметь Возможность свободного вращения. В указанных условиях заторможенными окажутся и зубчатые колеса 16, 15, 17, барабан 8 и правые центральные колеса дифференциалов 11 и 12. В процессе качки судов несущий канат 1 и привод его натяжения (например противовес 5) будут вращать барабан 4 в разные стороны. Так как барабан 8 и правое центральное колесо днг еренциала 11 в ВТОМ (Ьежиме неподвижны, то левое центральное колесо диффёрВЩийла 11 и жестко связанный с этим колесом барабан 7 будут вращаться в два раза быстрее барабана 4, что и требуется в данном режиме обеспечения неподвижности тележки относительно системы блоков 9: нижняя левая ветвь каната 6 неподвижна, првтойу Вёрхйяя ветвь долж на травиться или выбираться в два раза быстрее, чем канат I. Зубчатое Колесо 14 и дифференциал 12 при вТом не препятствуют вращению барабана 7, поскольку вал влектродвигателя 21 получил возможность свободного вращения. Режим С . Стоянка тележки у мачты обслуживаемого судна. Электродвигатели 2i к 22 н работают. Вал Электродвигателя 21 заторможен, а вал влектропвигателя 22 должен иметь Возможность свободного вра677989щения. При таких условиях заторможенным окажется и водило дифференциала 12. В процессе качки судов барабаны 4, 7 и 8 будут вращаться синхронно и в одном направлении относительно друг друга, блок 10 вращаться не будет, тележка будет неподвижной относителыю этого блока. Режим Ijl . Равномерное движение тележки относительно системы блоков 9 отход или подход к мачте обслуживаемого судна, В ВТОМ режиме ,в работу включается электродвигатель 22, вал влектродвигателя 21 имеет возможность свободного вращения. Отработка качки судов здесь происходит так же, как и в режиме J (когда барабан 8 неподвижен, барабан 7 врашается в два раза быстрее барабана 4). При включении электродвигателя 22 барабану 8 сообщается постоянная угловая скорость, направленная в ту или иную сторону. Движение барабана 8 будет влиять на движение барабана 7, который приобретает через дифференциал 11 дополнительную скорость, равную по величине скорости барабана 8, но направленную г в противоположную сторону, что и является необходимым условием движения грузовой тележки. Скорость движения тележки относительно системы блоков 9 определяется скоростью барабана 8, сообщаемой ему влектродвигателем 22. Так как скорость электродвигателя постоянна, то движение тележки относителтзно мачты обслуживае- мого Ьудна будет равномерным. При подходе к мачте тянущим 51Вляется барабан 8, а при отходе - барабан 7, управляемый барабаном 8. Зубчатые колеса 14 и 17 не препятстйуют вращению барабанов 7 и 8, так как вал влектродвигателя 21 может свободно вращаться. Режим FV . Равномерное движение тележки относительно блока 10 - отход или пошсод к мачте обслуживаемого судна. . , ,, В данном режиме в работу включается влектродвигатель 21, а вал электродвигателя 22 имеет возможность свободного врашекия. Обработка качки судов происходит так же, как и в режиме Т (все три барабана вращаются синхронно). При включении влектродвигателя 21 водило дифференциала 12 через эубчатуе колеса 14, 13 и диф
