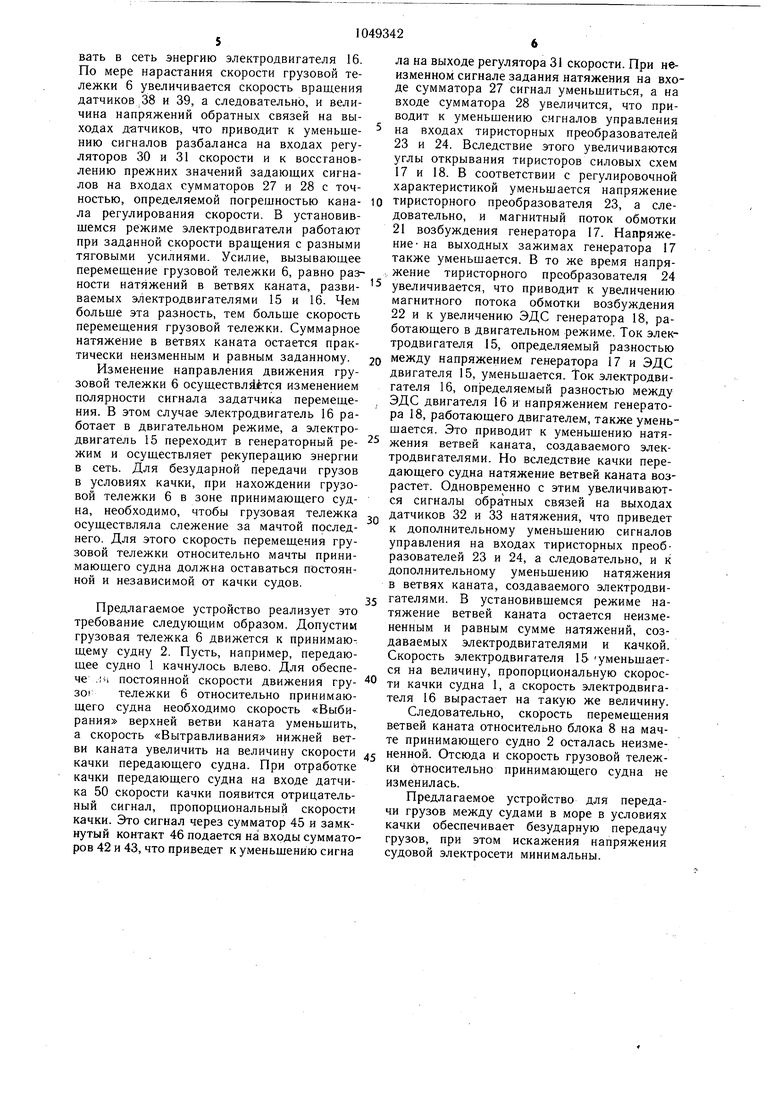
Изобретение относится к судостроению, в частности к устройствам для передачи грузов между судами в море в условиях качки. Известно устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на две тяговые лебедки, связанные с электродвигателями постоянного тока, имеющими якоря, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвью, а также электронный узел управления режимом работы электродвигателей, включающий два датчика натяжения ветвей каната, входы которых связаны с ветвйми каната, а выходы датчиков натяжения и выход задатчика сигналов натяжения подключены к входам первого и второго сумматоров регуляторов натяжения соответственно, причем выходы сумматоров регуляторов 20 натяжения подключены к входам. первого и второго регуляторов натяжения соответственно, а выходы последних связаны соответственно с первым и вторым тиристорными преобразователями, контур регулиро- с вания скорости перемещения грузовой дележки, состоящий из первого и второго датчиков скорости ветвей каната, кинематически связанных с ветвями каната, первого и второго регуляторов скорости ветвей каната, выходы которых подключены к входам до сумматоров первого и второго регуляторов натяжения соответственно, а входы связаны с выходами сумматоров первого и второго регуляторов скорости соответственно, причем первые входы сумматоров соединены с выходами датчиков скорости, а вто- 35 рые входы подключены к выходам дополнительных сумматоров первого и второго регуляторов скорости, причем первый вход дополнительного сумматора первого регулятора скорости связан с выходом задат- д чика сигнала перемещения, а первый вход дополнительного сумматора второго регулятора скорости соединен с выходом инвертора, вход которого подключен к выходу задатчика сигнала перемещения, а также контур формирования сигнала скорости кач- 45 ки судов, содержащий первый и второй датчики скорости качки точек подвеса канатной дороги на мачтах передающего и принимающего судов, выходы которых подключены к, входам сумматора датчиков скороети качки, а выход сумматора через нормаль- 5 но замкнутый контакт связан с вторыми входами дополнительных сумматоров первого и второго регуляторов скорости, а через нормально разомкнутый контакт, сблокированнь1й с нормально замкнутым контактом, сум- j матор датчиков скорости качки подключен к выходу удвоителя скорости качки судов, выход которого соединен с третьим входом дополнительного сумматора первого регулятора скорости 1. Недостатком известного устройства является возникновение искажений формы напряжений судовой сети при работе устройства. Целью изобретения является уменьшение искажений напряжения судовой сети. Поставленная цель достигается тем, что в устройстве для передачи грузов между судами в море в условиях качки, электронный узел управления режимом работы электродвигателей выполнен с первым и вторым генераторами постоянного тока, которые соответственно жестко связанны с первым и вторым приводными асинхронными электродвигателями, к якорям которых подключены соответственно генераторы постоянного тока, обмотки возбуждения которых подключены соответственно к выходам первого и второго тиристорных преобразователей, соединенных своими входами соответственно с выходами первого и второго регуляторов натяжения, На фиг. 1 представлена кинематическая схема устройства; на фиг. 2 - его функЦиональная схема, Устройство для передачи грузов между передающим судном 1 и принимающим судном 2 содержит мачты 3 и 4, между которыми натянуты ветви каната 5. Груз находится в тележке 6, соединенной с блоком 7, перемещающимся по верхней ветви каната 5, и жестко связанной с нижней ветвью каната, петля которого блок 8 на мачте 4 принимающего судна 2, а два конца, огибающие блоки 9 и 10 на мачте 3 передающего судна 1, соединены с тяговыми лебедками И и 12 Последние через редукторы 13 и 14 соединены со своими электродвигателями 15 и 16 постоянного тока, которые подключены к генераторам 17 и 18 постоянного тока, имеющими электродвигатели 19 и 20. Обмотки 21 и 22 возбуждения генераторов 17 и 18 подключены к реверсивным тиристорным преобразователям 23 и 24. Сигналы управления тиристорными преобразователями поступают с выходов регуляторов 25 и 26 натяжения, На сумматоры 27 и 28 этих регуляторов подается сигнал задания натяжения ветвей каната с выхода задатчика 29 натяжения, выходные сигналы регуляторов 30 и 31 скорости перемещения и сигналы обратных связей - по натяжению датчиков 32 и 33 натяжения, которые через блоки 34 и 35 кинематически связаны с ветвями каната. Входы регуляторов 30 и 31 скорости связаны с выходами сумматоров 36 и 37. На эти сумматоры подаются выходные сигналы датчиков 38 и 39 скорости ветвей каната, входы которых через блоки 40 и 41 связаны с ветвями каната, и выходные сигналы дополнительных сумматоров 42 и 43, являющиеся заданием для контуров регулирования скорости. На вход дополнительного сумматора 42 подается сигнал задания перемещения грузовой тележки с выхода задатчика 44 сигналов перемещения, суммарный сигнал скорости качки точек подвеса канатной дороги с выхода сумматора 45 датчиков скорости качки через нормально замкнутый контакт 46 или удвоенный сигнал скорости качки с выхода удвоителя 47 скороети качки. Вход последнего через нормально открытый контакт 48 соединен с выходом сумматора 45. На входы дополнительного сумматора 43 подается выходной сигнал инвертора 49, на вход которого подается сигнал с ьь хода задатчика 44, сигналов перемещения и суммарный сигнал скорости качки судов 1 и 2 с выхода сумматора 45 через нормально замкнутый контакт 46. На входы сумматора 45 подаются выходные сигналы датчиков 50 и 51 скорости качки точек подвеса канатной дороги на судах 1 и 2 соответственно. Устройство работает следующим образом. В исходном состоянии асинхронные электродвигатели 19 и 20 включены и вращают вхолостую генераторы 17 и 18. Сигналы управления на входе тиристорных преобразователей 23 и 24 равны, поток возбуждения генераторов 17 и 18 равен нулю. Натяжение в канатной дороге также равно нулю Задание натяжения производится подачей задающего сигнала с задатчика 44 на входы сумматоров 27 и 28 и далее на, входы соответствующих регуляторов 25 и 26 натяжения. На выходе тиристорных преобразователей 23 и 24 появляется напряжение, генераторы 17 и 18 возбуждаются и на их выходных клеммах появляется напряжение, поступающее на якоря электродвигателей 15 и 16 независимого возбуждения. Последние начинают вращаться, выбирая слабину каната. По мере работы электро-, двигателей увеличивается натяжение в ветвях каната и увеличиваются сигналы на выходах датчиков 26 и 27 натяжения, что приводит к уменьшению сигналов разбаланса на входах регуляторов 25 и 26 натяжения и к уменьшению напряжения на якорях электродвигателей. В установившемся режиме электродвигатели 15 и 16 неподвижны и развивают одинаковые тяговые усилия, равные заданному натяжению.. Для задания скорости перемещения грузовой тележки задатчиком 44 перемещения подается напряжение на вход дополнител ного сумматора 42 и на вход инвертора 49. На выходе последнего сигнал меняет свой знак и подается на вход дополнительного сумматора 43. Таким образом, на сумматоры 42 и 43 и далее через сумматоры 36 и 37 регуляторов скорости на сумматоры 27 и 28 регуляторов 25 и 26 натяжения подаются два, сигнала .одинаковой величины, но прот.ивоположной полярности. В результате этого суммарный сигнал на входе сумматора 27 увеличивается, а на входе сумматора 28 уменьшается. При этом увеличивается сигнал управления на входе тиристорного преобразователя 23 и уменьшается сигнал управления на входе тиристорного преобразователя 24. В результате увеличивается напряжение на зажимах электродвигателя- 15 и уменьшается напряжение на зажимах электродвигателя 16. Это приводит к ,увеличению момента стоянки электродвигателя 15 и к уменьшению момента стоянки электродвигателя 16. Натяжение в ветви каната, связанной с электродвигатёлем 15, увеличивается, а натяжение в ветви каната, связанной с электродвигателем 16, уменьшается. Как только усилие в ветви каната электродвигателя 15 станет больше усилия в ветви каната электродвигателя 16 и достаточно, чтобы прокрутить лебедку электродвигателя 16 в сторону «Травить, начнётся перемещение грузовой тележки 6 в направлении принимающего судна 2. Электродвигатель 15 продолжает работать в двигательном режиме, его скорость увеличивается, а натяжение в ветви каната, связанной с ним, изменится. В то же время электродвигатель 16 °Д действием тягового усилия электродвигателя 15 начнет вращаться в обратную сторону, его ЭДС изменит знак и он будет работать в генераторном режиме. Скорость электродвигателя 16 будет расти, что приведет к росту его тока и увеличению тормозного усилия в ветви каната, связанной с ним. При задании скорости перемещения грузовой тележки 6 возможны два режима работы генератора 18. При малых скорос ях перемещения грузовой тележки 6 последний работает в генераторном режиме. его напряжение положительно и подпитывает якорную цепь электродвигателя 16, также работающего генератором. Однако из-за действия обратной связи по натяжению ток этого электродвигателя не превыщает значения, соответствующего разности сигналов задания натяжения и задания скорости перемещения. При средних и больших скоростях перемещения выходное напряжение тиристорного преобразователя 24 меняет свой знак, что приводит к изменению направления потока возбуждения генератора 18, последний перемагничивается и переход в двигательный режим, его напряжение отрицательно и как только ЭДС электродвигателя 16 станет больше напряжения генератора 18, последний начнет подкручивать приводной асинхронный электродвигатель 26, который, перейдя в генераторный режим, начнет отдавать в сеть энергию электродвигателя 16. По мере нарастания скорости грузовой тележки 6 увеличивается скорость вращения датчиков 38 и 39, а следовательно, и величина напряжений обратных связей на выходах Датчиков, что приводит к уменьшению сигналов разбаланса на входах регуляторов 30 и 31 скорости и к восстановлению прежних значений задающих сигналов на входах сумматоров 27 и 28 с точностью, определяемой погрешностью кана-ю ла регулирования скорости. В установившемся режиме электродвигатели работают при заданной скорости вращения с разными тяговыми усилиями. Усилие, вызывающее перемещение грузовой тележки 6, равно разности натяжений в ветвях каната, развиваемых электродвигателями 15 и 16. Чем больше эта разность, тем больше скорость перемещения грузовой тележки. Суммарное натяжение в ветвях каната остается практически неизменным и равным заданному.2 Изменение направления движения грузовой тележки 6 осуществляется изменением полярности сигнала задатчика перемещения. В этом случае электродвигатель 16 работает в двигательном режиме, а электродвигатель 15 переходит в генераторный режим и осуществляет рекуперацию энергии в сеть. Для безударной передачи грузов в условиях качки, при нахождении грузовой тележки 6 в зоне принимающего судна, необходимо, чтобы грузовая тележка осуществляла слежение за мачтой последнего. Для этого скорость перемещения грузовой тележки относительно мачты принимающего судна должна оставаться постоянной и независимой от качки судов. Предлагаемое устройство реализует это требование следующим образом. Допустим грузовая тележка 6 движется к принимающему судну 2. Пусть, например, передающее судно 1 качнулось влево. Для обеспече .In постоянной скорости движения грузог тележки 6 относительно принимающего судна необходимо скорость «Выбирания верхней ветви каната уменьшить, а скорость «Вытравливания нижней ветви каната увеличить на величину скорости качки передающего судна. При отработке качки передающего судна на входе датчика 50 скорости качки появится отрицательный сигнал, пропорциональный скорости качки. Это сигнал через сумматор 45 и замкнутый контакт 46 подается на входы сумматоров 42 и 43, что приведет к уменьщению сигна 3 ла на выходе регулятора 31 скорости. При неизменном сигнале задания натяжения на входе сумматора 27 сигнал уменьшиться, а на входе сумматора 28 увеличится, что приводит к уменьшению сигналов управления на входах тиристорных преобразователей 23 и 24. Вследствие этого увеличиваются углы открывания тиристоров силовых схем 17 и 18. В соответствии с регулировочной характеристикой уменьшается напряжение тиристорного преобразователя 23, а следовательно, и магнитный поток обмотки 21 возбуждения генератора 17. Напряжение- на выходных зажимах генератора 17 также уменьшается. В то же время напряжение тиристорного преобразователя 24 увеличивается, что приводит к увеличению магнитного потока обмотки возбуждения 22 и к увеличению ЭДС генератора 18, работающего в двигательном режиме. Ток электродвигателя 15, определяемый разностью между напряжением генератора 17 и ЭДС двигателя 15, уменьщается. Ток электродвигателя 16, определяемый разностью между ЭДС двигателя 16 и напряжением генератора 18, работающего двигателем, также уменьшается. Это приводит к уменьшению натяжения ветвей каната, создаваемого электродвигателями. Но вследствие качки передающего судна натяжение ветвей каната возрастет. Одновременно с этим увеличиваются сигналы обратных связей на выходах датчиков 32 и 33 натяжения, что приведет к дополнительному уменьщению сигналов управления на входах тиристорных преобразователей 23 и 24, а следовательно, и к дополнительному уменьшению натяжения в ветвях каната, создаваемого электродвигателями. В установившемся режиме натяжение ветвей каната остается неизмененным и равным сумме натяжений, создаваемых электродвигателями и качкой, Скорость электродвигателя 15 уменьщается на величину, пропорциональную скорос качки судна 1, а скорость электродвигателя 16 вырастает на такую же величину. Следовательно, скорость перемещения ветвей каната относительно блока 8 на мачте принимающего судно 2 осталась неизмененной. Отсюда и скорость грузовой тележки относительно принимающего судна не изменилась. Предлагаемое устройство для передачи грузов между судами в море в условиях качки обеспечивает безударную передачу грузов, при этом искажения напряжения судовой электросети минимальны.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |

УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГРУЗОВ МЕЖДУ СУДАМИ В МОРЕ В УСЛОВИЯХ КАЧКИ, содержащее ветви каната, заведенные на две тяговые лебедки, связанные с электродвигателями постоянного тока, имеющими якоря, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвью, а также электронный узел управления режимом работы электродвигателей, включающий два датчика натяжения ветвей каната, входы которых связаны с ветвями каната, а выходы датчиков натяжения и выход задатчика сигналов натяжения подключены к входам первого и второго сумматоров регуляторов натяжения соответственно, причем выходы сумматоров регуляторов натяжений подключены к входам первого и второго регуляторов натяжения соответственно, а выходы последних связаны соответственно с первым и вторым тиристорными преобразователями, контур регулирования скорости - перемещения грузовой тележки, состоящий из первого и второго датчиков скорости ветвей каната, кинематически связанных с ветвями каната, первого и второго регуляторов скорости ветвей каната, выходы которых подключены к входам сумматоров первого и второго регуляторов натяжени.я соответственно, а входы связаны с выходами сумматоров первого и второго регуляторов скорости соответственно, причем первые входы упомянутых сумматоров соединены с выходами датчиков скорости, а вторые входы подключены к выходам дополнительных сумматоров первого и второго регуляторов скорости, причем первый вход дополнительного сумматора первого регулятора скорости связан с выходом задатчика сигнала перемещения, а первый вход дополнительного сумматора второго регулятора скорости соединен с выходом инвертора, вход которого подключен к рыходу задатчика сигнала перемещения, а также контур формирования сигнала скорости качки судов, содержащий первый и второй датчики скорости качки точек подвеса канатной дороги на мачтах передающего и принимающего судов, выходы которых подключены к входам сумматора датчиков скорости качки, а выход сумматора через нормаль(Л но замкнутый контакт связан с вторыми входами дополнительных сумматоров первого и второго регуляторов скорости, а через нормально разомкнутый контакт, сблокированный с нормально замкнутым контактом, сумматор датчиков скорости качки подключен к выходу удвоителя скорости качки судов, выход которого соединен с третьим входом дополнительного сумматора первого регулятора скорости, отличающееся тем, что, с целью уменьщения искажений напряжений со оо судовой электросети, электронный узел управления режимом работы электродвигателей выполнен с первым и вторым генера i to торами постоянного тока, которые соответственно жестко связаны с первым и вторым приводными асинхронными электродвигателями и подключены соответственно к якорям первого и второго электродвигателей постоянного тока, причем обмотки возбуждения первого и второго генерато- ров подключены соответственно к выходам первого и второго тиристорных, преобразователей, соединенных своими входами соответственно с выходами первого и второго регуляторов натяжения.
Фл/г/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3390999/27-11, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
