И ioCipcioinu огиогмтся к промыш.юпному тр;11К пор| у, а именно к K()iiiu4 ioi iii iM сш те- м;1м, применяемым дли трапгнортироики шгучных i i)y:ion на рабочие потоки.
Цель и-М)Г)рет(М1ии рясишреине функциональных но:1можностой, повынюиие на- дежноетн и нрон:ии)днтельности конпсиорной системы.
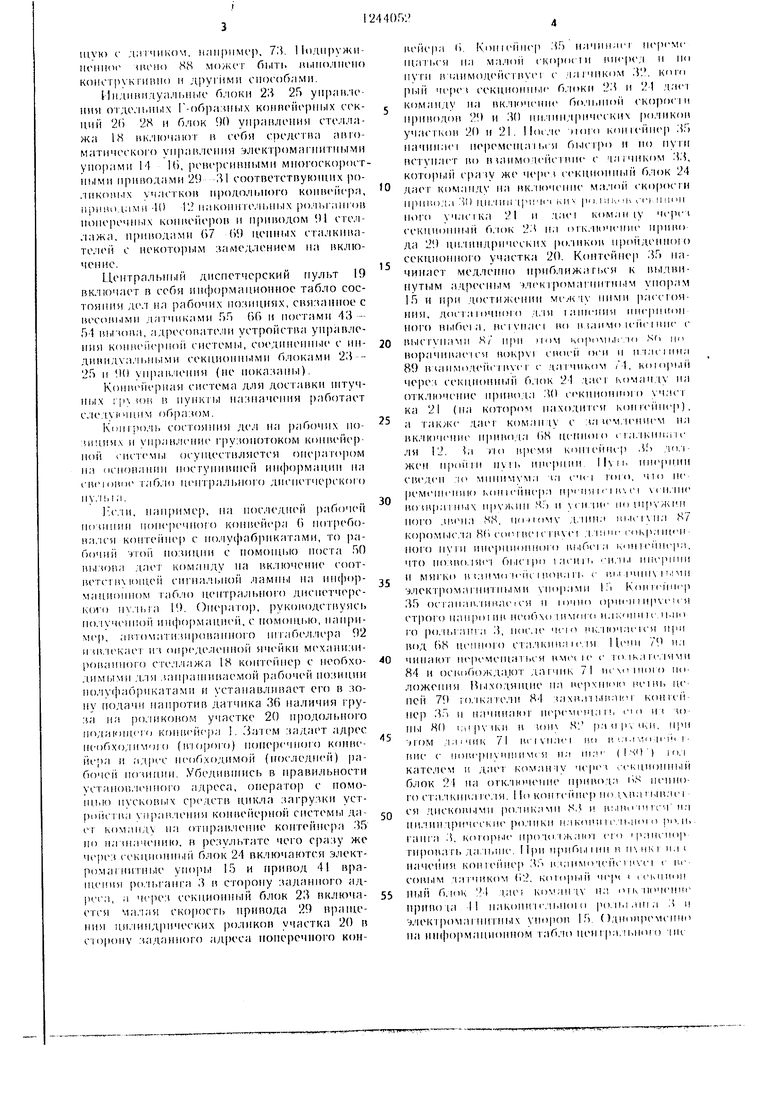
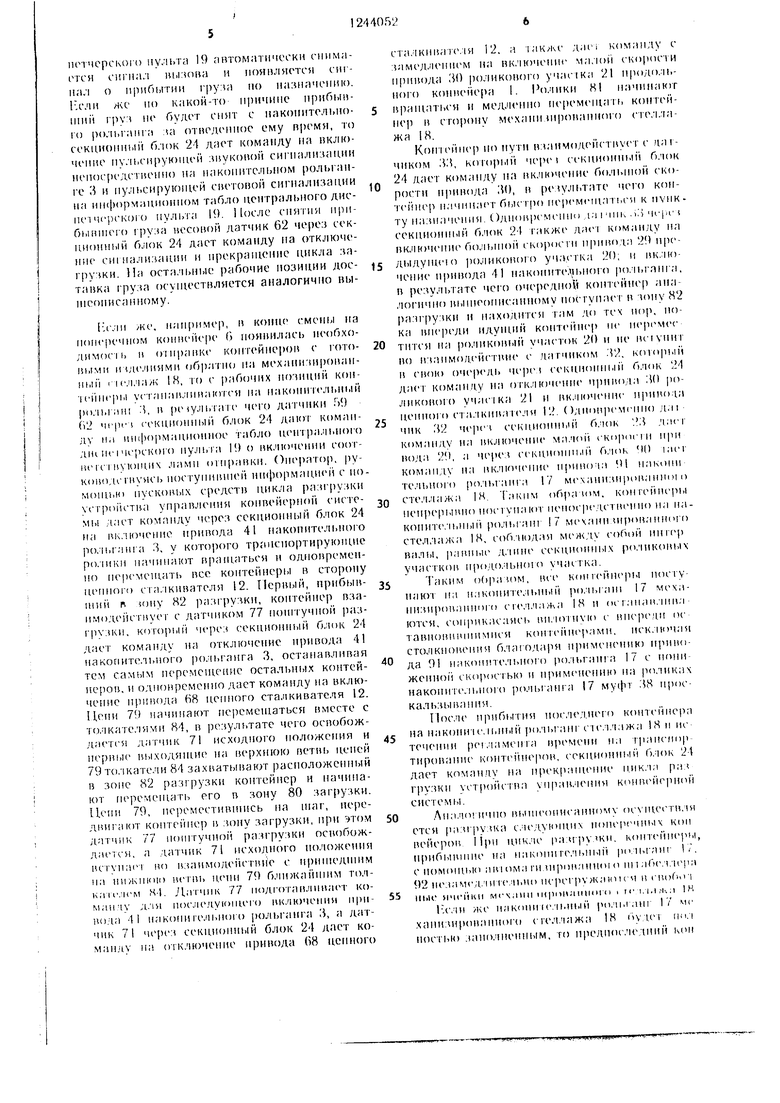
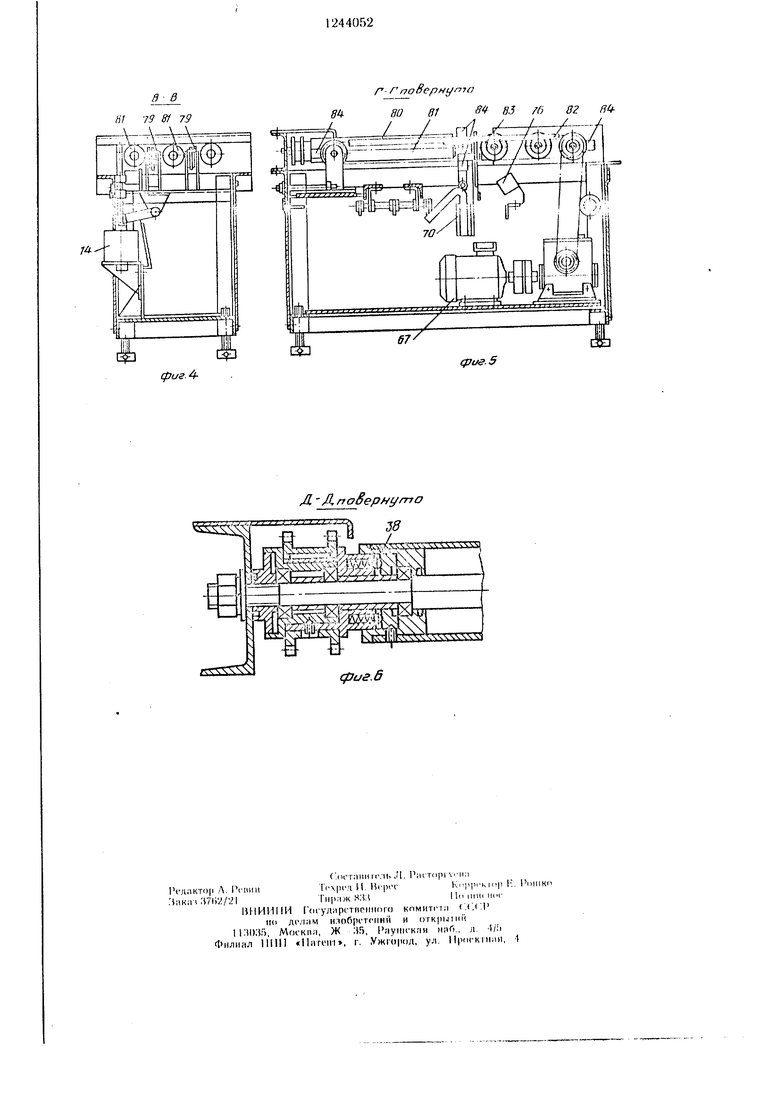
На ()иг . 1 и;и)Г)рпжсна предлагаемая кон- HeiiepHOM система, оГ)Н1ИЙ нид и нлаие; ма (|)И1. 2 111)1дпига1()ии11 |ся электромагнитный yiiDj) г ii(j;i.Hi)y KiiHi HiibiM кором)1сл()м, киие- мати им-ки )де1(стпук)ни1М с идущим к нему грузом и датчиком ноип учной .чагру.ч- ки, ричре.ч Л Л ()|иг. 1; на (|)И1 . 3 иыд- вигаклциГк-я адресный электромагнитный упор с поднружинеиным коромыслом, нид В на (|)иг. 2; на (|)нг. 4 и 5 - цепной стал- киватель, разрепы П-В и Г- -Г на фиг. 1; на фиг. () устройство муфты нроскаль- зыиання накопительного рольганга мсхаиизи- ponainioro стеллажа, разрез Д-Д на фиг. 1.
Конвейерная система для доставки Н1туч- иых Iрузов в пункты назначения содержнт продолыи,и | нода1он|,ий конпсйер 1, накоин- ,1е роль|-ангн 24 понерсчн1 1х конвейеров Г) 7, смонтировани1)10 у мест 8-10 перегрузки ueniibie сталкиватели 11 -13, выдвижные адресные электромагнитные уноры 14 -И, накопительный рольганг 17 мсхаии- знрованного стеллажа 18 и центральный днс- иетчерски пульт 19. Поперечных конвейеров с ролы ангамн может бьггь исограни- ченное N-e количество, а количество цеп- 1плх сталкивателей и количество вь1движных адресных электромагнитных уиоров соответствуют количеству ноперечных копвейеров. Продольный 1Юдаюи1Н11 конвейер 1 вьпюлпен роликоги.1М и разделен на отдельные участки 20 22 по количеству поперечных кон- tuniepoB. Каждый поперечный конвейер 5-7 совместно с соответствуюниши им отдельными участками 20-22 продольного 11одаюи1е- го конвейера 1 и соединяюньнми их иод прямым уг.чом цепными сталкивателнмн И - 13, а также совместно с входян1имн в них э.чсктрооборудованием и индивидуальными секционными унравления блоками сос- таи.чяют отдельные самостоятельн1 1е Г-образ- секции 26-28 конвейерной системы, что позволяет комиановать разнообразные поточные линии (в том числе и для бригадного способа работы).
Отдел,ные участки 2022 продольного
подаюнгего конвейера 1 снабжены индивиду ал ьнь1 ми MHorocKoiiocTHbiMH реверсивными приводами 29 31 транспортных роликов и датчиками 32- 34 иереключения скорости. Участок 20 иродолыюго конвейера 1, рае- положен1П)1Й перед мсханнзированным стеллажом 18, имеет у зоны нодачи коптей- иерои ЗГ) датчик 30 наличия груза. Секция 37 п1)одольиого подаюнцм О конвейера 1, расположепная на нижнем ярусе мс- ханизированиого стеллажа 18, выполнена в
иид( нрнппдпого с поии/к(ЧП1ои i кпроп ыо накоинтс. и.иого ро.мьганга 17 с му(|ч;1ми 38 нроскальзывання н снабжена дат1И1кпм максим ал bHoi o занолнення возв|1ап1а1оп1ихся обратно с поперечпых конвей(-ров контейнеров 35. Датчик 39 расноложен от дагчи- ка 36 на расстоянии, немно|-им больше I a- баритпых )азмероп KonTeiinepa ЗГ.
Накопительные ролыан|-и 2 4 пон(р1-ч 1Х KOHBciiepOB 5 7 выно.чнеиы прямо.чи
нениь1ми, оснап1ены реверсивнымн нривоаа )
ми 10 4, и нмсют на p, iii n ii но.пщни (их Можег бьпь ье кн. исич i lui) посты 43 Г)4 вьг)ова н В(Ч овые да1чнки Г)Г1 66.
(галкпва гелн И 13 въню.шимп, в виде
цеппых г|)пнс11ортеров, снаГ)женньгх |ieiu-p- сивными приводами ()7 ()9, датчиками 70 72 ИСХОД11О1Ч) положения, дагчиками 73 75 ион1тучной заг1)узки, датчиками 76 78 поиггучиой ()аз| рузки 1гаконителып.1х ро.чьгмпгов 2 4 H()nejie4Hbix конвейеров 5 7. TpaiiCHO|iT(4i каждого сталкивате.чя II 13 состоиг из двух пара. мельных цепей 79, рас- ноложепньгх у зоны 80 загрузки межчу цн- линд11ическимн ролнками 81 1Н)Д. пон1его конвейера н у зоны 82 разг|)узки между дпс- комымп ро.микамн 83 пакопителыюго ролы-аи- га. На каждой цени 79 симметричио, с одинаковым тагом, рапным ншрние продо.чь- ного подающего конвейе(а, жестко закрси- леиы четыре толкате.чя 81, выстунаюпии- в
средн(М1 их части над ро.миками 81 и 83 и ноперемепио взаимодсм Ь-тнующие с ip;nicni p- тируемым штучным грузом и с датчиками 70-72 исходного ноложения.
Механизм останова груза иыно.мнеи в виде выдвнга1оп1нхся адреспых элекгромлгиигных упоров 14 16, каж.чый из KOTOJIUIX имеет 1иа11нирио закрепленное н соосио расно- ложонное подиружипспнос пружиной Sfi ко- pOMiiK 4o 86, одно и. к чо (акан- чипается периепдику. 1Я|1по июгпутым вьи гу- пом 87, в.заимодсйсгиующим с и.пушим к
нему на ма.пой, заблаговременно пецск.чю- ченной, скорости П(редвнжения коигейне- ром 35, а второе и.печо взаимодсмнтвуег ч(- рез иодиружинеиное звено 88 с чапчиком 7.3 по1птучио11 загрузки, обсспечипаюн .им прок- раи1ение перед.1Аижения кошсйпера Л.пипа В1 1стуна 87 В1 |брана досгаточной д.чя свое временного отключения приводов 29 31 транснортньгч ро.-шков участков 20 продольного пода1он1его конвейера с уч1Ч ом сок- panieHHoi o нне1)циониого Bi i6era кшпейнера
за счет нрогиводс11С|-вукмце1 о уси.чич пружн- ны 85 и нодиружииеиного .звена 8. г с. обеспечивается н.чавньп останов и мя|-кое взанмодействие контейнера с выдвнн т1,1мп элект|1ома1 питнымн ynojiaMH, гочпс ори- еитируюн1имн KoHTeinu p строго напротив
накоиительно1 о рольганга адресуемпгD поперечного конвейера. Нодпружипенное зв(М|о ,48, консольно закрепленное к коромыс.му 8fj, на конце имеет пластину 89, взаимодействуютую с- литчиком, ii;iii()iiM(. | 7,4. 1 iojuipywii- H(4iii(i( fiuMio 88 мо/ксг Г)ЫТ1, И1,И10,Ч1И.Ч1О К()иотрук1 11пио и лруг11ми сиособпми.
Иплини.чуп.пьиыс б.чсжи 2:- 25 yii|);iH,4( - ПИЯ тде. 1Ы1ых Г-обрлчпых Kniin( сек- ПИЙ 2() 28 и Г). 1пк 90 упрпи./юния сте. жа 18 ик. почакгг и с обя средстиа aiu o- млтичоск1)|ч) управломмя улоктромигиитиыми 14 И), poiu iM HiuibiMM мпогосжорпгт иыми пршюдами 29 . соотпетстпующих |к)
.И1К( участком продольного кошими рп
ирипчлами -И) Г. пакошпчмьных . ibraiiroi попсрочны.х KoiiHciiopoi) и приводом 91 сте.п- .чажа. приводами ( ()9 ценных frajiKHisa- Te;i(M i с некоторым замедлением ил включение.
Центральный диспетчерский ггульт 19 включает п себя uHcjjOjiManHOHHoe табло еос- тояини дел на рабочи.х но.чнцнях, снягь-щное с вееовыми датчиками 55 66 и 1И)е гами 43 - 54 В1.1чопа, адресопатели устройетва унрлпле- иия K()iiiu4(pn()ii спетемы, ссх-днненные е ни- дивид ал1 пыми еекпиоииыми блоками 2, i - 25 и 9(1 уп|1ав.чения (не иока:и111ы).
Конвейерная енетема для доетлвкн 1итуч- i р «)1 п нункты на. нючепня )абот;)ет е.тедуичцпм образом.
Кпшроль СОГТОЯ1П1Я Д1 л на )аб()чих по- н уираилени rpy;u)HOTOKt)M KoHBin iep- noii (-lu-Tf Mb: огупи етпляетея tjiu paropoM па (н ионанип ноетуннвнкм нн(|)о|5млци11 па ()И(и 1аб:И1 и1М|трлл1 Н(Н о диеп(тче1Н кого ny. ii.i а.
F.e/iH, например, на ноеледшм рабочсч ночииии 11()ГИ |)ечП()го Koinseiiepa (i потребо- ва.чги KoiiTeiuK p с ио.му1|)аб|1икатами, то ра- 6o4Hii 41011 нозицпи е tioMoniiiio иоета 50 вычопа даег команду на вк.тючение еоот- 1Ч1гнал1,поГ| .памш. на HH(|ioji- мациопном габ. ю нентрального дпенетче(е- ком .ia 19. OiK parop, 1П К()водегвуяс1 по.1уч1ЧП 0 1 HiKJiopMauiieii, с иомоицло, иапри- мер, ат()м;п 11:и1|)ов;1нно1 о ||1таб(М1лера 92 ичв.чекаег ич оиреде.шмпюй яче11кн м(ханичи- роваиного стел.чажа 18 коич ейпер е необхо- димымн .чля .ianpaiHHiiaeMoii рабоч(м 1 нозицни но,(|)абрикатам11 и устанавливает его в зону нодачи напротив датчика 36 наличия груза на po.HiKOBOM участке 20 нродол111()го нодакмн.сго кг)ив( й( ра I. Зачем задает адрес Н( обхо.;1им )1 о (inoporo) пон(4)ечн)го коние- iiepa и адрес необлодимо| 1 (ноеледн ч 0 ра- 6()4eii починни. Убедивигись в правильности устапоилен11()1 о адреса, оператор е номо- п.1,к) пуековых ередстг uiiK.iia за|-ручкн ует- |)iiiu TBa прав,че1П1я KoHBei iepHoii системы да- ei команду на отправление контейнера 35 но начпачепию, н |)езультате чего с|П1зу же через секпнонньи блок 24 включаются элект- ромагин1Ч1ые уноры 15 и привод 41 Bjia- nieniiii ро.чы-ап|-а 3 в еч орону заданного адреса, а через секпнон1П11Й блок 23 пключа- ется малая ско|1()сгь ирииода 29 нраиц - иня нилнндрнческнх роликов участка 20 в ciopoHv .чаданного адреса поперечного кон
вейера 6. ои1ейн(р 35 начннагг Н(-рсмс ньзчч.ся па ма.чой скор(илн 1ии ре,ч н по пугн вчанмоде11ств чм с .ча1чикп 1 3,. кого рьп ) чс реч с екннонньк б.чоки 23 и 21 .ч, команду на вк.чюченне бо.чьнюй ( прнводов 29 и 30 иплипд|)иче1 ких ролнков учасгков 20 н 21. После )1(но конкчнк р 3,5 начнн:1( 1 iiepeMCHia I ьс я 6i,icipo н но нучи псч уна( т н лимоче11стипе с чагчиком ,3,3, который ж( че|)еч секиноииый б.чок 24 даег к()м, 1нду на мк.чюченпе ма,чоГ| скоросги
npniiO. l, 31 ) HH. illli 4pli 1Г| КИ X Р( I, I и 1,, II-, v 14 | il 41
пого учас1ка 21 п .Чс им коман ly чс|Н ч секниоппый блок 2, H,I шключспш нрнво да 29 ци. чшдрнческих ро,чнков н)01 |денного сек11,ис)нного участка 20. (и1ер ,35 на- чинаеч мед,тенно ирнб,пнжаг1 ся к выдвинутым лдр(Ч Н1,м , 1ект11ома1 ппч ным упорам 15 н при достижении ме/кчу ппмн рассгоя- 1П1Я, достаючного д.чя пмисния инсрпион ного вьКнча, Mciviiaei во вч.шмо iciici нпс ( высгупами Я/ ирн ,мпм киромм .HI Sb м но|)ачивае1 ся сноси оси н нчаспша 89 вчаимо.ч(ч |сгв -сг с .чагчнком /4, Koiopi.iii чере.ч се1 пионн11п | б,|ок 24 ,чае1 1 оманд на оч К,Ч1очение нриво.ч,ч 30 сскнпонного час| ка 21 (на которо 1 плхо.чигс я конкч пи р). а ч акжс даем- команчу с ча к-м.ченисм на вк,ч1очени( нрнвод.а 1)8 HeUHoio с i а.чкпи, ir
0
. 0 0 5
S
жен проГци Hvib инерции, llvn, нпсри.нн еве.;1.ч1 . ic мппнмум; ч;| счп юго, чю пе |)емсн1(Ч1111о коиIсннер, ир| пя м i и I l (п. вочиратнмх S,) п уснчк IMI inps /KMii пого .iiuMia Н8, (|(1(1( .1.1ИН,| IU, 87 коромыс.ча 8(i с(11Ч веили ч-| .гмпи, (-окра щеп ного пугн инерционного В1,1б(ч ,-i кпик-Гии-р;, что но.чво. 1яе 1 бькчрп lacHii, H. n.i иисринн
и мягко в аИМО|г(С I И11М ГГ с 1,1, МММ
у,пекч ромагпитиыми Ч1орамн I Г. Конгсннср 35 О(.тапав. iCH н ii)4iio opni ii i ир см я строго иапрошв нсобхо шмпго M,i -: uni имьпп го |)о/п гаига 3, пос,и 4ci(i 1К.Ч1ом;1сгся нрм вод f)8 HciiiMiro сталкина 1C. |я Ценн 79 ii,i чииают перемеп1аг1 ся с гч. |ка i LMSIMH 84 и осв1 бождак)т датчик 71 исммчпго но- ложепия 1 ыхо;1Я1цие п,з lu pxnioin петь це пей 79 ().,чн 84 чахи,г1 ыи-зкч конгей нер , н начинают перемета, cui нч чп ны 80 и чон 8: р,з (I р (h.ii, )гом л;|гчик 71 ,чс1 ип в M-I Mnn-iii |. lilie с П1)В(-)П i на in;ii ( I SO ) lo.i кате,мем и даег команчу чср -ч ,; ci uHOHHi,iit блок 21 на огк,ч1оченне приво.ч, ь, псиио- го ( Ч а.чкпв; ге.чя. 11о конт(ч п1ер но i.xB, i гьп,чг ея дпскопымн ро.микамп 8,( и имнч мпгч па
ИИ,.ЧрИЧСГКНС (Ю.ЧИКИ П.ЧК01ИП 1МЫ11Ч | pil.ll,.
глига , i, котрыс нрочо ч/каин cin |р,зигиор тнронать да.. Прн чрибьиии п ) 11,11 начения контейнер 35 вчаимочейсппчл с иг eoBbiM ча1чнком (i2. кошрьп чер гскчипи 111)111 блок М ч.асг Ki iaii4. и, IMK поченис Привоча 1 нлкони|с.чьн(Н о po.ii,:,nii,i ,1 н -.мекчромагни I иьгх унорон 1,5. Оянопрс-мсин ил ин(|)о|1мапиоинг)М габло нен1рально|() чис
noTicpcKoi o иу.ьта 19 пнтомати кч ки снимл- отся ciii iia. Hi.Kuma и появляется fiii - нал о ириПытии rpy:ui по 11а: иаче11И1(). Г.слк но какой-то ii|)H4Hiie upHHiiii)- niiii t rpy:t no будет спит с накопительно- го ро.чьгапга :(а отнеденнос ему время, то секционный блок 24 диет команду на включение ну. 1ьснрук 1це11 звуковой си1 на,1ии1ации неносредственно на накопительном рольганге 3 н пульсирующей световой снгиалнзуцни на )орманио11ном табло iieirrj)ajibHoro дис- нетчсрскою пульта 19. 11осле снятня нрн- быпшего py;ta весовой датчик 62 через секционный блок 24 дает команду на отключение сигналн. кщни и нрекраии нне и1кла :ia- гру:(ки. На остальные рабочие нозиции дос- тавка груза осуп1еств.пяотся аналогично иы- шспнисанному.
i-л-ли же, например, в койне смен1;1 на поперечном конвейе)е ( ноявилас) необходимое ь в (пнравке коптейне1)ов с гото- lu.iMH и (делиямн j6pa iHO па механн: Н|)Ован- iiiiii i 1 к лла/к 18, то с рабочих но иший кон- leiinepi.i устапавлииакпся па паконнтельньи) рплы ;И11 ., в ptMyjibnrre чего датчики Г)9 ()2 Mi pr 1 ceKUHOHHbiii i блок 24 дают команду 11,1 и||||)ормапионное табло нейтрального дникч McpcKoi o нульга И) о включении соот- lUMCTiiyionuiN ламп огнравки. Оператор, ру- ковпдсгвуясь ностуиивнкм нн(|)ормацие11 с но мо1пы 1 пусковых ciHviCTH цикла pa:tr iy:iKH ycrpoi u-тва управления конвейерной снсте- мы дает команду чере:1 секционный блок 24 на вк. поченне нривода 41 11аконите;п ного ро, 1ьг-авга 3, у KOTojwro траиснортируюнще po.iHun начинают вращаться н одновременно перс мениггь все конте1П1еры в сторону цеппш о CIа.чкнвателя 12. Псрп1)1й, прнбыв- iHiiit п ону 82 i aarpyi H, контейнер вза- пмод(М ст11уег с датчпком 77 нонггучной разгрузки, которь|й через секционный блок 24 дает команду на отключение нрнвода 41 накопительного jiojibraHra 3, останавливая тем самым неремещение остальных контей- иероп, и одновременно дает команду на включение привода 68 цеппого сталкивателя 12. Цени 79 начинают неремен1аться вместе с толкателями 84, в результате чего освобож
дается датчик 71 исходного положения и
Hcp)ii)U вых()дян1Н( на верхнюю вотв) пеней 79 толкатели 84 захватывают расноложенп1 1Й н зоне 82 разгрузки контейнер н начинают перемен1ать его в зону 80 загрузкн. Цени 79, переместившись па niar, передвигают коптейпер в зону загрузкн, при этом датчик 77 ио1птучно1 1 разгрузки оспобож- дается, а датчик 71 исходного но. юження исгунаег но взанмоде11ствйе е нришедишм па нижнюю вегвь н.(МН1 79 б,мнжайН1НМ тол- 1,т1гл( м K-i. Датчпк 77 подг отавливает ко- маичу д. .я П()следук)П1ег) вк.чючения при- пода 41 накопигельиого рольганга 3, а датчик 71 ч(рез секционнь й блок 24 даст команду па отключеппе привода 68 ценного
5 5
0 Q
5
0
5
5
сталкпвакмя 12, а iaK/i e дае; команду с заме;ь;1ени1 м на включенне малоГ скорости п|)нвода 30 ролнкопого учас1ка 21 н|1одо.:|Ь- ного коннейе(а 1. Ролики 81 иачинают враиьчться и медл(41ио неремеп1агь KoiiTcii- нер в сторону механнзпрованн(И о С1ч |ла- жа 18,
KoH iininep но нути взаимод(м 1ствует с .паг- чнком 33, когорьп чep( i С1 кци)ииый б.чок 24 дает команду на включение бо.пыио) скорости иривода IW, в результате чего кон- теГшер н,-1чппа(г бысг|)о переме1паться к пункту пазиачеиня. Одновременно да i чп1 .iii чг|н i секпнониый б.мок 24 гакже команд,у на включ(ЧП1е больни)й скоросгн п|1нвод;1 2) H|ie- дыдушею роликового уч,-1сгка 20; и включение П1)ивода 41 накоинтед1ьиого ро.мьгапга, в результате че1Ч) очередпой котчм 1не 1 ана логичио вьпнеогп1са11цому 1Н)егупает в зону 82 раз1 рузки и иаход1ггся гам ца тех иор, пока 1ин реди идуИ1Н| ) конт(м п1е| не перемес тнтся на ро,1П1Ковы| | учасгок 20 н не BCIVHHI во B3:uiMo;i,eiicTBH( с датчиком 32, когорьп в свою очеред1 че|)ез секцпоиньп блок 24 дает команду на О1 к;1юч141ие нривод,-| 30 ро- ,||икс)вого учас1ка 21 и включеппс приноса цепного сталкив, ггели 12. ()днов и мгппо да1 чнк 32 через секци(НИ1Ы1 | б.чок 23 даег ком;1иду на 1И лючение ма.чой 1-К1)р(ити при вода 29, а чс рез (чччционпьп б.юк 90 laer комапду на вк.чк1Ч(мпи нрииоча 91 накопи тельного ро.чьган|-а 17 М( хаинзнр11ванн1)| о сте, 1,|ажа 18. Г;(ким образом, конгейнс ры иенрерьпию носгун,зюг пеиосред,ствеиио на па- коннт( 1ьный (юльгапг 17 М(анизиров, 1нипго стел, 1ажа 18, соб.-1юд,зя между co6oii инг(р валы, рави1,1е д.чнне секцнонных ро. 1ик(ни.(х учаетков продо.чьпого учасгка.
Таким образом, все г(м и1еры посгу- нают на накониччччьиый (ю. п.ган 17 меха- ннзнрои,-1ннпго сг(ч. 18 и oci анав.чппа ются, соприкасаясь вн. пггиую i- впе|1(чи ос тавновиипшмпся Koinciim paMH, нск.иочая столкновения благодаря нрименсмшю HIMIBU- да 91 накои1 те, 1ьно о ро.чьган1-а 17 с нони- женно11 скоростьк и нрименению иа роликах наконнте,1Ы101Ч1 ро.мьганга 17 Myijir 38 нрос- кальзьпьчнпя.
Пос.че нрнбьггня нос. 1едне Ч) конпч йпера на пакони нмьньп ро.чьгаиг сим.чажа 18 и ис тече1П1И pei.iiaMeina иремеин на гранспор тирование KoHTci niepoB, секпиониый б.юк 24 дает кома)ду па П(1екра1цепне п.ик.ча р,зз грузки ycTpoiu THa управ.мепня конвсйгрно) систем .
Лнп.Ч(1гнчп(1 вьпиеоинсапному (нл ществ.чя ется разгрузка с.Ч1 дуюп1их нонеречныч коп вейеров lipii цикле р,чзгру.кн. конгейперы, нрибьпипне на накопиге,ч1,1и.и | рп.чы аиг Г,. с ИОМОП1ЫО am ом,з ги.шров.-пии i ni i аГнм.чера 92 шмамед.миге. п.но н. |нм |П ка1П1( я и rnof- i i иые ячейки мсчлип шркилщшгп к i. i.i ,ч-,;| IK
Гл .чи же накопи le. ibHbii i рп.чыан 17 мг хаиизир(Н1анного сгел.чажа 18 оудет nn.i ностыо зано.чпенным, го предпос.чедпий кон
KM iMcp иггуппт II пснтпиипое и:1лим( luк с дпгчиком i) м,-п гим;|,1и,||ог() .i;inn.ii- 11ГИНЯ. а иог.мгдпий коптойнор (ктуниг и постоянное п uiMMOAOiicTiiiic с датчиком . Ui H;I- лнчия гру.чп 11 :u)MO под.ччи Koirnniiiepon, то оП;) эти датчика немедленно дадут команду к устройство управления конвейерной системой на прекрапц иие цикла разгрузки.
Таким образом, в предлагаемой коннейер- ной системе ПОЛЕЮСТЫО мехапизироп.чны тру
доемкм( погру.чочно-p.):irpv 1Ч(11.1с и ipaiii Hopi Hbie раГ)О11.1 и мсжинсраниинныч ник лах.
Кои1ич |е)наи система можсг на(гги самое широкое нримененне и различных отрас.чих народного Х()ЗЯ11стма, как д.чя ск.чадоп, гак и для всевозможных поточгних лииий, нрс имуи1естненно для доставки п нункты Furuia- чения крупногабаритных и мета/1лоемких 1птуч11ых грузог.
7Л
/ 34 3 7А « ГгбЯ я
55 JO 73
9г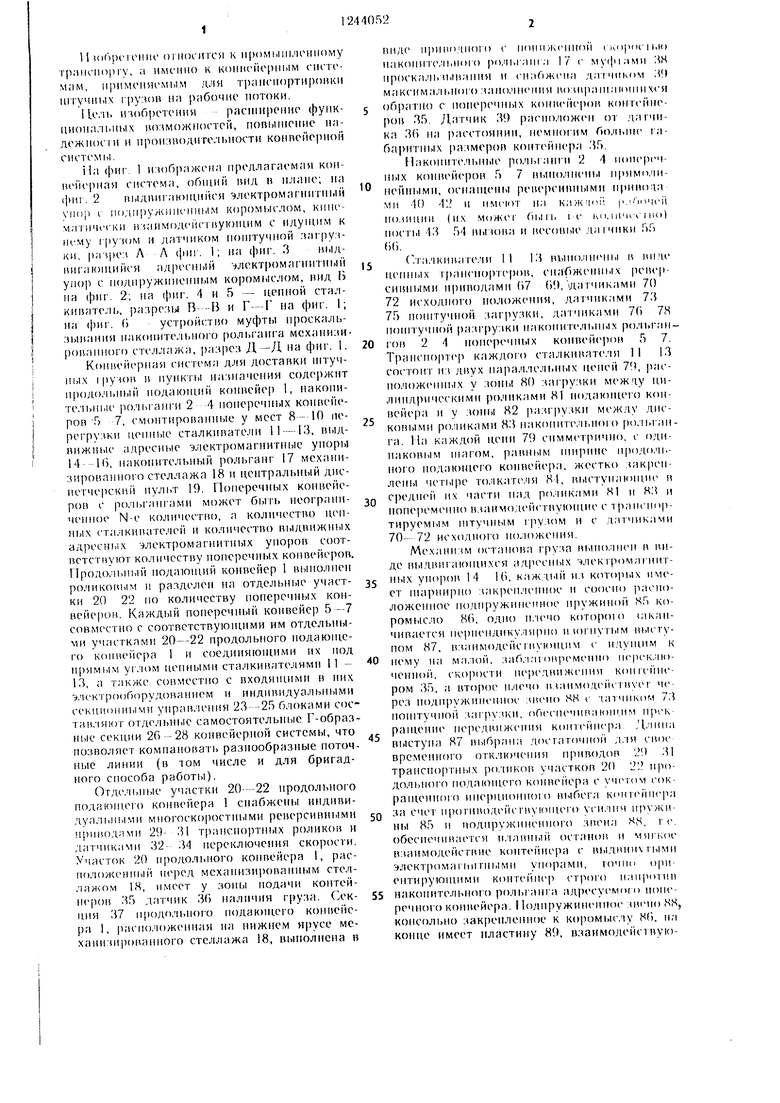
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Устройство для управления роботом технологического конвейера | 1987 |
|
SU1526985A1 |
| Устройство для управления конвейерной системой | 1984 |
|
SU1240706A1 |
| Устройство для изготовления деталей из пруткового материала | 1986 |
|
SU1395407A1 |
| Роторно-конвейерная машина с устройством для автоматической смены инструментальных блоков | 1980 |
|
SU948607A1 |
| Устройство для защиты контактной сети железных дорог,электрифицированных по системе 2х25 кв | 1985 |
|
SU1237494A1 |
| Устройство для сборки деревянных каркасов панелей | 1982 |
|
SU1073093A1 |
| Синхронно-следящее устройство передачи информации на конвейере для сортировки древесины | 1985 |
|
SU1319935A1 |
| Роторный автомат питания | 1986 |
|
SU1371848A1 |
| Генератор качающейся частоты с цифровым управлением | 1978 |
|
SU855936A1 |
А -А
ffuff
87 81
(риг. 2
(ригЪ
fi 75 Ш 79 - Д Д. ,
..
inVii
ff4
Л- f поВернугпо
80 gi8f/ S3 /6- 82 в
.Х-.г4 ,
МЛ Ь±---- :::.Ti- - ,,, /щП й
ff4
Л- f поВернугпо
80 gi8f/ S3 /6- 82 в
CflUS(puff. 5
Л Д. повернуто
n
ери а. 6
