.54) РОТОРНО-КОНВЕЙЕРНЛЯ .A С УСТРОЙСТВАМ ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТАЛЬНЫХ
Изобретение относится к области машиностроения,а более конкретно к устройствам для автоматической смены отказавших блоков инструментов или их элементов.-в автоматических роторно-конвейерных машинах и линиях.
Известна роторно-конвейерная машина с устройством для автоматической смены инструментальных блоков, установленных на станине, содержащая кассету с налаженными инструментальными блоками, перемещающуюся по прямолинейным направляющим с возможностью кинематической связи с инструментальным конвейером посредством вилки сочленения, каретку, имеющую механизмы извлечения неисправного инструментального блока и вставки налаженного, и механизм управления перемещением каретки с управляемыми флажками, установленными на каждой позиции инструментального конвейе.ра 1.
Недостатками известной конструкции являются высокая конструктивная сложность, а также то, что смена отказавшего инструмента производится в специальном роторе с помощью :гистемы рычагов и подвижной кассеты БЛОКОВ
с запасом налаженных блоков инструментов .
Такая конструкция не позволяет использовать преимущества, создаваемые наличием в роторно-конвейерной линии свободных участков инструментального конвейера.
Кроме того, устройство применимо только для инструментальных блоков
10 определенной конструкции.
Целью изобретения является повышение надежности работы роторно-конвейерной машины.
Поставленная цель достигается тем,
15 что каретка подпружинена относительно станины роторно-конвейерной машины, а механизм управления ее перемещением снабжен защелкой и двуплечим рычагом, установленными с возмож20ностью поворота на дополнительно введенных осях, закрепленных на станине, и взаимодействия между собой и соответственно с кареткой и упранляег- ым флажком, причем каретка снаб25жена дополнительным рычагом, связывающим управляемый флажок с вилкой сочленения каретки и с инструментальным конвейером.
Кроме того, с целью обеспечения
30 безопасности обслуживания кассета
с налаженными инструментальными блоками установлена на станине ротормо-коивейериой JviamnHM не подвижно, а на карепсе г.еханизмы иэвлече 1ня неисправного инструментального блока и вставки налаженного ВЕЛтолнены в }эиде двух ползунов с захватами, расположег;ных в горизонталГ)НС)й плоскости под углом друг к другу, гтоследн;-1й из которых npejvtias качен для захвата налаженного инструментального блока из сассеты.
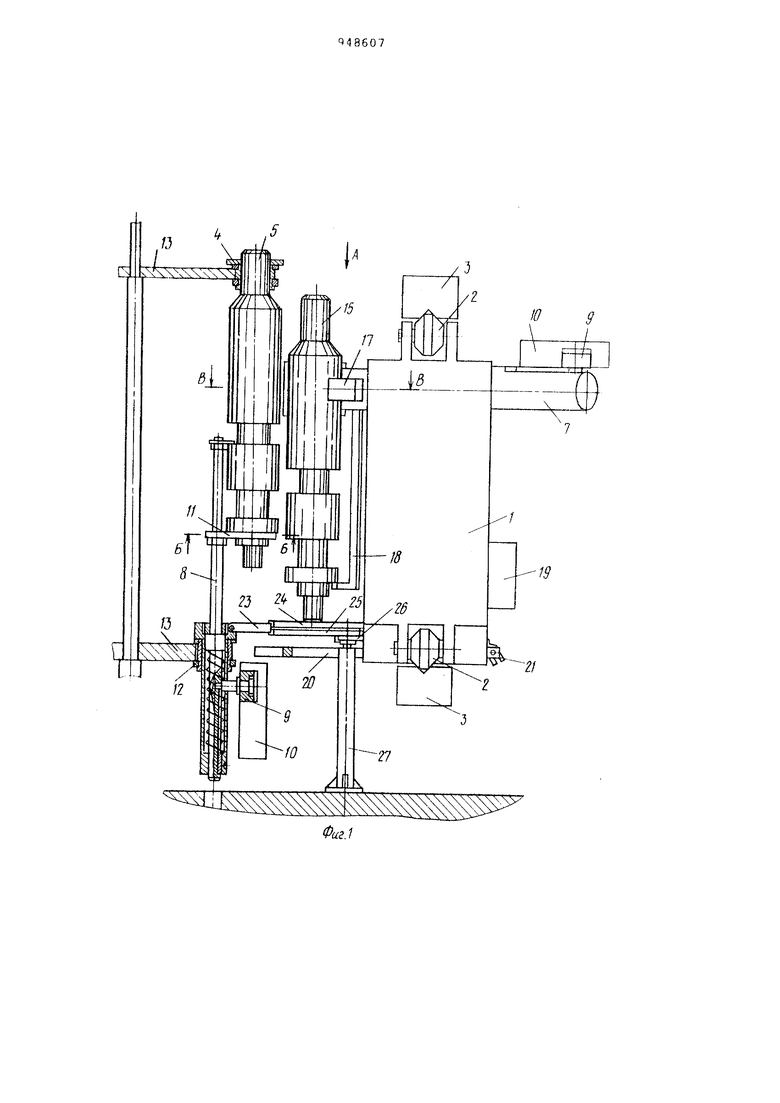
Ка фиг. 1 изображена часть роторно-ко;)венерной машины с устройством антоматическоП смены инструментальнмх блоков; на фиг. 2 - вид Л IMir. 1 ма -i-iT . 3 - разрез В-Б фиг.. 1; но.
м О-коняРИ;рнон : мгмгк;; jii к а рк Tina роликах 3 г{( примолимспмо ;, отпуг.1гмгталь -10гг
(),
/л
кдо;.; гнезде конвоиера находит/я И;иТ;:; ментальн:лй . На каретко 1 чС -аноплспы попзун 6 удаления f) а за jinio го пи струме нтальнслгч, блока и 1К).тг9ун 7 нставки алаженного. На (дх 6 )1 7 vi штоке 8 устанОПемы ролиг;и 9 , иеремс ща 0 :1иеся в неподвижном пазовсхм кулачгке 1.0 заданногО профайл.ч .
В нижней части инструменталь и-л.и блок ; улерж 1;)ается планкой 11, ус;atiOr.ieiiHf: ft на птоке 8, укрепленно. в . конвейере 12. Оба конвс.йера ycTafiOB.nenbi lia направляющих звездочках 13, жестко закреплег-ных на одi-iOM валу. Заиас налаженных инстоуMei-rrajibHbix блоков расположен в Kcicceте 14, негго;: вилс Ю установленной на сгганине роторно-конвейерной машиН1-,. Иа;к 5;«енн.ый инструментальный блок 15 удерживается в ползуне 7 подпру. упором 16, защелкой 17 и н.тжним упором 18. Па каретке 1 установ.пе:-: электромагнит 19, унравляю ций вилкой 20 с пог-ющью рычага 21. Разгонная пружина 22 одним концом жестко закреплена на станине роторно-конвейеркой машины. На позиции конвейера 12 установлен управляемый флажок 23. На каретке 1 установлен включаюиигй электромагнит 19 рычаг 24 и регулируег- ый по длине плеча двуплечий стопорный рычаг 25, удерживающий каретку 1 в исходном положении с помощью защелки 26, который закреплен с помощью стойки 27 на стаг;ине роторно-конвейерной ма1ии 1Ы. Ползун 6 снабжен подпружиненными клещами 28, изв.лекаю1цими отказавший инструментальный блок .
Устройство работает следующим образом.
В исходном положении напаженн.ый инструментальный блок 1 Г; удерживается подпружиненными yi)op(M б , заи5елкой 17 и юддерживается упором 18, РазгОгшая пружи;1а 22 оката кареткой 1, каретка 1 удерживаеч.;.-.. в исходHQM 1;з-лож нии защелкой 26, Инструментальн-ли конвейер 4 и 1ижний конвейер 12 Henpept-jBHO гере еш.аются по нап1::аи..дим звезд, 13. .При обнаружении неисправного инструментально). о б..чока на этОй по-зиции управляемый ф.гажслс .23 переводится специалън;лм электромагнитом из вертика.П :Лс;то хо.лс;ото1О уюложения в рабочее гг:ризонтальнее.
При взаимодействии флажкг 23 с рычагом 25, жг.стко связанная с ним заще; ка ос;,ко кдае1 1, которой .;;;.;е:.-сл ::. помощью разг-онкой г:пу:к;-;Т -. 2 J. ;д::.и;ПИая (Л:на 7 dOr.i()C.:-: ..;;.:.1Ь д ижу;:;е1ося коньей -ра , 1 га ::;;.;-)с:гъ мр::лет р:.; у ;иг;о ;.я т Е с.; изме 1емипм с тег; е ни ПI))
KC v;;- .: и::ой ;1ь:с г:ко;.) саро ЗчИ 1 i;
Hif.nioMnT з.:и;ггjpoNaiHnT 1 J, котогЫй с: по:.-:о;:;ь;: ;зи;:к11 20 г;сздаст кинс/ма ическую Mi ж;о 1 и -; 2..
(; . ija;;:ija(.:TC;: совместно;с. движения каргТК -; : 1и)НЕейеоов 4 и 12. Везудар ос гь сое;;и1енич р:аречки 1 с (оитзейером о 3есг;су ИВаетс подбором BGJH- 4HHb плеча р.. 25 и степенью :;од:кат1-я пружины 22. Ролик О, связанный с n-.;.3VilOr. Oj. СЛО.;1УЯ Г1;.)ОфИЛ::; ;ГД1ОД ;И:К: О1О
иазового кулачка, :iepij:.;.r::iae.. ;;(}л-эу-; б по ;:а 1ра75лени с к копв н;еру л. , коправпый .-:ен а..;й с.ок S - Ролик 9, св5;заинмй ее.; :;ло1гм 8.. nepeNe цает его вниз (. 1) и извлекает неисправный инструментальный б.чок 5 из конвейера 4, затем bNie-Te с ипсггрумерггальььзм Олоко1.1 5 ио.пзун 6 отходит в исходное положение. ПриводиМ1: й в 1:вижег;ие роликом 9 ползун7 вместе с налахсенным ичетрумеитальнглм яблоком 15 перемещается к кон1зс:йеру 4 и прихо;дит на позицию . 8, переме ;;аясь вверх ( 1, , -;ста эляет нгишжеьпилй блок в rsieai o конт)ейера 4. Иопэун 1 отхогпгг в исхо;1ное положение. В конце иь:тервалг71 .движения каретки с помощью упоров клещи 28 раскр-лваются, отводится упор 18 ;i неиспт.)ав11ый блок вьлпадаеп в
ПрИСМН;.ЯЙ дЮТОК . От ОТде.ПЬНОГО ПРИБОдда (на чертеже не показан) каретка 1 Бозвр 1щается в исходное полс.жение, в котором ползун 7 из кассеты
тальнь1Й бло:(, а (шретка 1 эзвод1гг 11ружину 22. В дальнейшем операция иовторязтоя аналогичнглм образом.
Bf-jHOJiHeifne кассеты с запасом палаженных инструментатгьных б.юков
неподвижной обеспечивает возможность ее безопасной подпитки в любой момент времени без применения специальных схем блокировки. Размещение исполнительных органов на подвижной каретке позволяет производить замену отказавшего блока инструментов без остановки роторно-конвейерной машины, используя для этого свободный участок инструментального конвейера. Изменение длины участка сопровождения позволяет подобрать оптимальные динамические параметры работы устройства .
Расположение исполнительных органов в горизонтальной плоскости под углом друг -к другу позволяет уменьшить габариты устройства и заменять инструментальные блоки заданной сложной конфигурации.
Формула изобретения
1. Роторно-конвейерная машина с устройством для автоматической смены инструментальных блоков, установленным на станине, содержащая кассету с налаженными инструментальными блоками, перемещающуюся по прямолинейным направляющим с возможностью кинематичес;сой связи с инструментальным конвейером посредством вилки сочленения , каретку , и /1еющую механизм извлечения неисправного инструментального блока и вставки налаженного, и механизм управления перемещением каретки с управляемыми флажками, установленньп ги на каждой позиции инструментального конвейера- о т л и ч s ющ а я с я тем, что. с целью поЕЫ;- ения наде;хности ее работы, каретка подпружинена относительно станины роторно-конвейерной машины., а ьеханизм управления ее nepeNieuieHHeM снабжен защелкой и двуплечим рычагом, установленными с возможностью поворота на пополнительно введенных осях, закрепленных на , к взаимодействия между собой и соответственно с кареткой и управляелйдч флажком, причем каретка снабжена рычагом г связываю1цим управляемый флажок с вилкой сочленения каретки и с инструментальным конвейером.
2. Ма;:1ина по п. 1, о т л и ч а ющ а я с я тем, что, с целью обеспечения безопасности обслуж5- Еан я , кассета с налаженными инструментальны 1: блоками установлена на станине рсторио-конзейерной машины неподв;-5 ;;но , а механиз 1Ь извлечения чеисправнсго инструментального блока и вставки
.1 налаженного выполнень т в виде двух ползунов с захватами, располо;кенных в горизонтальной плоскости под , друг к другу, последний из которых предназначен для захвата налаженногс инструментального блока из кассеты.
Источники информации, принятые во внимание при зкспертг:з5
1. Авторское свидетельство СССР
ю д

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструментальных блоков | 1983 |
|
SU1131629A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1131628A2 |
| Устройство для автоматической смены инструментальных блоков роторно-конвейерных линий | 1983 |
|
SU1161322A1 |
| Устройство для автоматической смены инструментальных блоков роторно-конвейерных линий | 1983 |
|
SU1103987A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1134346A1 |
| Устройство автоматической смены инструментальных блоков | 1986 |
|
SU1425030A1 |
| Устройство для автоматической смены инструментальных блоков | 1988 |
|
SU1671440A1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |
| Роторно-конвейерная машина | 1978 |
|
SU818811A1 |
| Роторно-конвейерная машина | 1977 |
|
SU668798A1 |