Изобретение относится к металлургической технике и может найти применение при управлении объектами регу- лировай ия с рециклом (т. е. с внутренней положительной обратной связью), /содержащими запаздывание на входе и /подверженные влиянию контролируемых возмущений по входу.
Целью изобретения является повьше- ние точности системы.
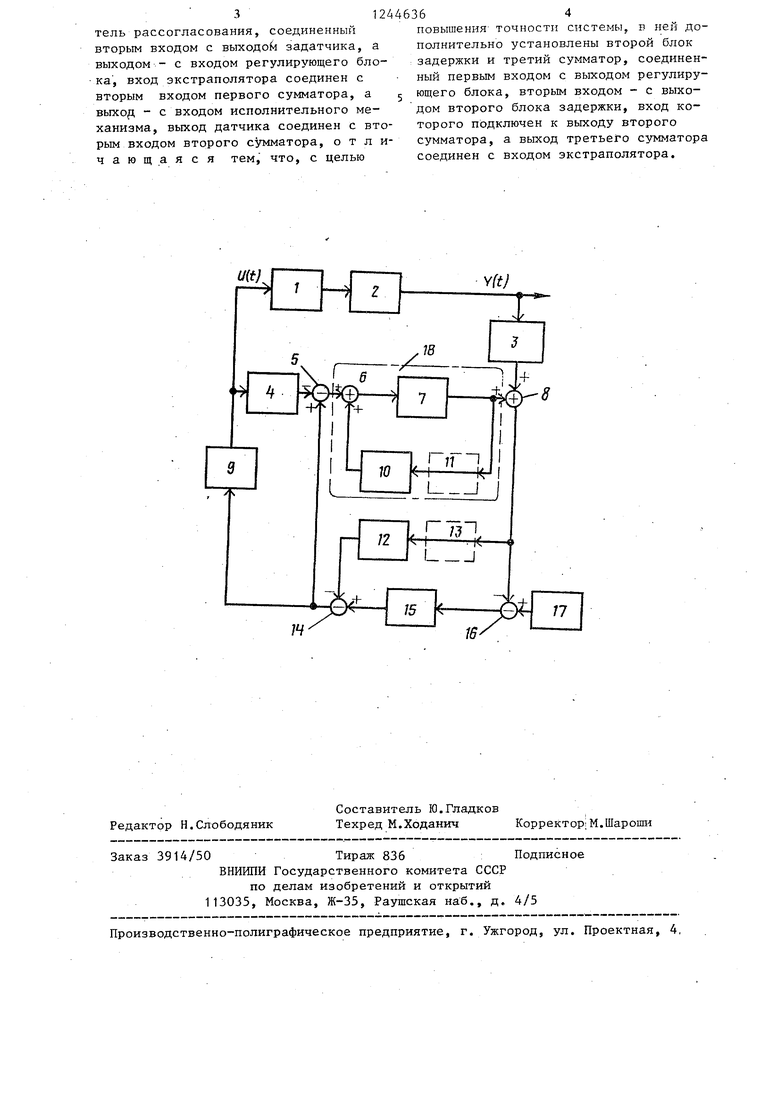
На чертеже представлена структурная схема системы.
Система управления содержит исполнительный механизм 1, объект 2 регулирования, датчик 3,первый блок 4 за- держки, первый и четвертый сумматоры 5 и 6, модель 7 прямого канал а,, второй сумматор 8, экстраполятор 9, третий блок 10 задержки, второй масштабирующий блок 11, второй блок 12 за-. держки, первый масштабирующий блок 1 третий сумматор 14, регулирующий бло 15,измеритель 16 рассогласования, за датчик 17, модель 18 объекта регулирования.:
На чертеже приняты обозначения U(t) - регулирующее воздействие в t- ый момент времени, Y(t) - регулируемый параметр...
В состав модели объекта 18 реГули ро.вания входят модель прямого канала
75 четвертый сумматор 6 и третий блок 10 задержки.
Масштабирование сигналов, проходящих через второй и третий блоки 12 и 10 задержки, может быть осуществлено как изменением коэффициентов усиления по входам третьего и четвертого сумматоров 14 и 6, так и путем введения специальных масштабирующих блоков 13 и 11, которые на чертеже системы обозначены пунктиром.
Система работает следующим образом Регулирующее воздействие вырабатывается регулирующим блоком 15 в замкнутом через модель 18 объекта регулирования без запаздывания, составленную из модели 7 прямого канала, второго масштабирующего блока 11, третьего блока 10 задержки и четвертого сумматора 6, натурно-модельном контуре регулирования. Отрицательное влияние положительной обратной связи в объекте 2 регулирования компенсируется сигналом, вырабатываемым последовательно соединенными первым масштабирующим блоком 13 и вторым блоком 12 задержки, т. е. сигналом, вырабатываемым моделью цепи поло5кительной
обратной связи. Скорректированное таким образом регулирующее воздействие экстраполируется экстраполятором 9 на время за.паздывания на входе объекта 2 регулирования и реализуется .исполнительным механизмом 1.
Для реализации предлагаемого алгоритма функционирования системы регу
0
лируемый параметр Y(t) объекта 2 регулирования измеряется датчиком 3. Полученный сигнал поступает на второй вход второго сумматора 8, где алгебраически суммируется с выходным сигналом модели 7 прямого канала. Выход- ной сигнал второго сумматора 8 вычитается в измерителе рассогласования из сигнала задатчика 17 и результирующий сигнал поступает на вход регули- „ рующего блока 15, например, с пропорционально-интегральным законом регулирования. Выходной сигнал второго сумматора 8 умножается в первом мас- ,штабирующем блоке 13 на коэффициент 5 k, задерживается во втором блоке 12 . задержки на время t и вычитается в третьем сумматоре 14 из выходного сигнала регулирующего блока 15. Б результате чего исключается отрицательное влияние положительной обратной связи. Выходной сигнал третьего сумматора 14 экстраполируется на время l экстраполятором 9 и подается на вход исполнительного механизма 1. Кроме того, выходной сигнал экстрапо- 5 лятора 9 задерживается в первом блоке 4 задержки на время Т и вычитается в первом сумматоре 5 из выходного сигнала третьего сумматора 14. Полученный сигнал об ошибке экстраполяции регулирующего воздействия преобразуется в модель 18 объекта регулирования, которая реализована с помощью четвертого сумматора 6, модели 7 прямого канала, третьего блока 10 задержки и второго масштабирующего блока 11. С выхода модели прямого канала 7 сигнал посд упает на первый вход второго сумматора 8.
50 Фор мула изобретения
Система управления, содержащая последовательно соединенные исполнитель-- ный механизм, объект регулирования, 55 датчик и последовательно соединенные экстраполятор, первый блок задержки, первый сумматор, модель объекта регулирования, второй сумматор и измери0
45
тель рассогласования, соединенный вторым входом с выходом задатчика, а выходом - с входом регулирующего блока, вход экстраполятора соединен с вторым входом первого сумматора, а выход - с входом исполнительного механизма, выход датчика соединен с вторым входом второго сумматора, отличающаяся тем, что, с целью
повышения точности системы, в ней дополнительно установлены второй блок задержки и третий сумматор, соединенный первым входом с выходом регулирующего блока, вторым входом - с выходом второго блока задержки, вход которого подключен к выходу второго сумматора, а выход третьего сумматора соединен с входом экстраполятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
Изобретение относится к области металлургической техники и может найти применение при управлении объектами регулирования с рециклом (т. е. с внутренней положительной обратной связью), содержащими запаздывание на входе и подверженные влиянию контролируемых возмущений по входу. Целью изобретения является повышение точности системы. Сигнал задания поступает на первый вход измерителя рассогласования, на второй вход которого поступает выходной сигнал первого сумматора. Выходной сигнал измерителя рассот гласования через регулирующий блок поступает на первый вход второго сумматора, а на второй его вход поступает выходной сигнал первого сумматора. Выходной сигнал второго сумматора через экстраполятор поступает на входы исполнительного механизма и первого блока задержки. Выходной сигнал первого блока задержки поступает на первый вход третьего сумматора, на второй вход которого поступает выходной сигнал .второго сумматора. Выходной сигнал третьего сумматора через модель объекта регулирования поступает на первый вход первого сумматора, а на его второй вход поступает выходной сигнал датчика. .Исполнительный механизм воздействует на объект регулирования, а регулируемьш параметр на вы ходе объекта регулирования контролируется датчиком. В состав модели объекта регулирования входят последовательно соединенные сумматор, модель прямого канала и блок задержки, соединенный выходом с первым входом сум- ма5 ора, причем второй вход сумматора и выход модели прямого канала являют- ся входом и выходом модели объекта регулирования. 1 ил. ГчЭ 4 со оэ
U(t}
14
Редактор Н.Слободяник
Составитель Ю.Гладков
Техред М.Ходанич Корректор; М.Шароши
Заказ 3914/50Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4,
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЦИРКУЛЯЦИОННЫМИ ПРОЦЕССАМИ | 0 |
|
SU371560A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Регулятор | 1980 |
|
SU855607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
