11245357
зобретение относится к сортируювп ед вы м о д т
щим устройствам и может быть использовано при сортировке деталей.
Целью изобретения является иовы- шепие эффективности сортировки пу- тем ориентирования объектов сортировки.
Иа фиг.1 представлена блок-схема сортирующего устройства; на фиг.2 - 5 - примеры деталей (квадрат, круг, равносторонние треугольники соответственно) , которые подвергаются сортировке.
Устройство содержит манипуляцнон- ный механизм в виде схвата 1 манипу лятора, на котором установлены измерительные датчики 2, контролирующие положение губок схвата 1, аналого-цифровые преобразователи 3, блок 4 ключей, счетчик 5, элемент ИЛИ б, генератор 7 импульсов, регистр 8 . сдвига, блок 9 ключей, блок 0 упраления сортированием, элемент ИЛИ 11 логический инвертор 12, элемент ИЛИ 13, логический Н1вертор 14, элемент 15 задержки и одновибратор 16, три независимо перемещающиеся губки 17- 19 схвата 1,
Обнуление счетчика 5 происходит в процессе работы устройства,
Устройство работает следующ -ш образом,
Ири сжатии губок манипулятора дачики 2 формируют аналоговые сигналы Преобразователь 3 преобразует эти сигналы в дискретные. Единичные сигналы, появляющиеся на выходе, данног преобразователя 3, через э.чемент ИЛИ 13 поступают па элемент I5 задеки, который осуществляет задерлску на время, необходимое для полного сжатия губок. Затем сигнал выхода элемента 15 задержки поступает на одновибратор 16, Одповибра- тор 16 формирует единнчньи сигнал, ,Д1Н1тельность которого обеспечивает прохождение дискретных сигналов с выхода преобразователя 3 в счетчик и запись их в этом счетчике. Запись информации в счетчике 5 приводит к тому, что на некоторых его выходах появляются единичные сигзшлы. Любой из единичных сигналов, имеющихся н -выходе счетчика 5, через элемент ИЛИ 6 поступает на генератор 7 и включает этот генератор. Сигналы с. выхода генератора 7 через элемент И I1 ноступают па вход пер
ваи ячейки счетчика 5. Происходит гга- полнс И1е счетчика 5. При ноступлении едпн:;ри1ых сигналов в счетчик 5 с выхода генератора 7 наступит такой момент, когда все ячейки счетчика окажутся в единичном состоянии. Следующий сигнал, приходящий с генератора 7, приведет к переполненню счет,чика 5, т.е, все его ячейки имеют нулевое состояние. Так как все ячейки счетчика 5 в нулевом состоянии, то на выходе счетчика 5 - то;Же пулевые сигналы, а это приведет к отключению генератора 7. Таким образом, после каждого цикла работы счетчик 5 оказьшается обнуленным ,
Одно из последних этанов работы устройства это разжат1 е губок схвата для освобождения детагнг, перемещенной в требуемое место. Разжатие губок в устройстве приводит к тому, что сгггналы датчиков 2 становятся нулевыми. Сигналы на выхо- 1дах п зеобразователя 3 - также пуле- :пые. Иа выходе элемента ИЛИ 13, соединенного с выходом пшертора 14 - также нулевой сигнал. Следовательно, па выходе инвертора 14 - единичный сигнал. ;диничный сигнал с выхода инвертора 14 ноступает на ип-пгу установки регистра 8 в исходное состояние, причем в первой ячейке регист-- ра 8 сдвига записывается единица, а во всех остальных - нули. Информация из регистра 8 сдвига через блок 9 уже нередапа в блок 10, поэтому обнуление регистра 8 сдвига , , не влияет на дальнейшую отработку выбранпо нодпрограммы. При сжатии губок схвата манипулятора па выходах данного преобразователя 3 появляются единичные сигналы, а следовательно, на влгходе инвертора 14 - нулевой сигнал.
Синхронизация работы счетчи- ка 5 и регистра 8 сдвига осуществляется при помощи генератора 7 импульсов, един гчлые импульсы с выхода которого одновременно ноступают на вход счетчика 5 и вход регистра 8 сдвига. Обиулетше счетчика 5 не происходит в тот момент, когда необход1-1мо считать соответствующую программу из блока 10. Считывание соответствующей npoi-раммы из бло- , ка IО происходит после обнуления
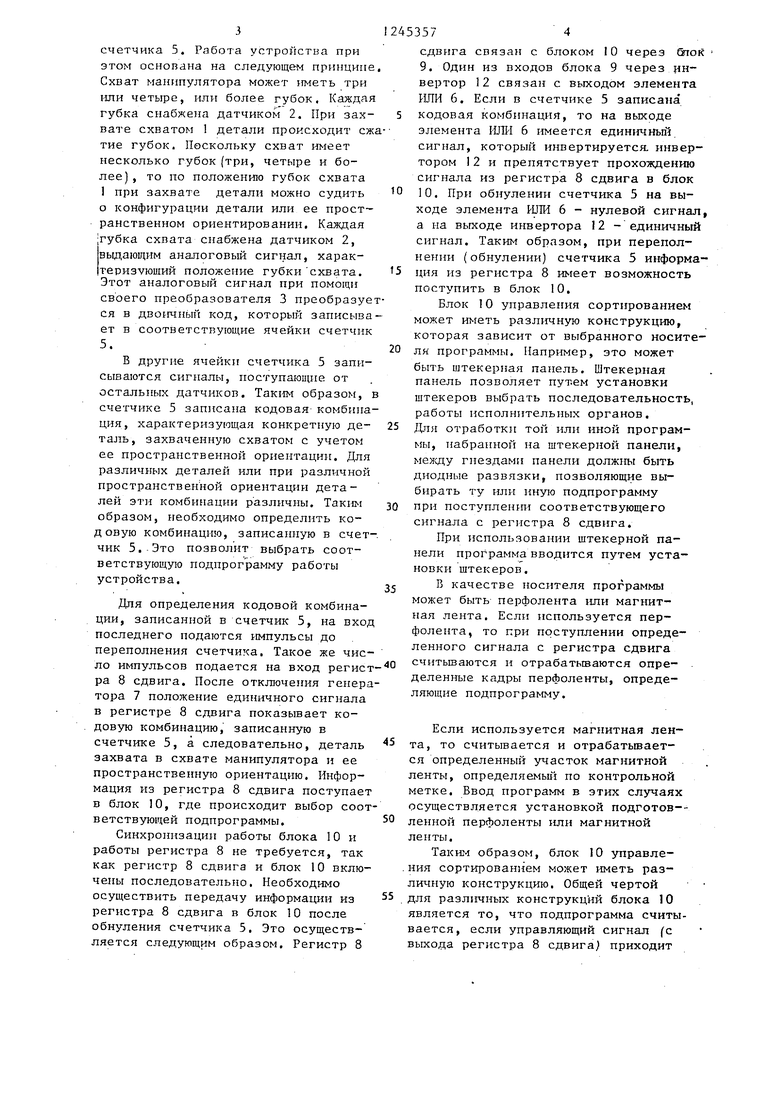
счетчика 5. Работа устройства при этом оснопана на следующем принципе Схват манипулятора может иметь три или четыре, или более губок. Каждая губка снабжена датчиком 2. При захвате охватом I детали происходит сжтие губок. Поскольку схват имеет несколько губок (три, четыре и более) , то по положению губок схвата 1 при захвате детали можно судить о конфигурации детали или ее пространственном ориентировании. Каждая ;губка схвата снабжена датчиком 2, выдающим аналоговый сигнал, характеризуюший положение губки схвата. Этот аналоговый сигнал при помощи
своего преобразователя 3 преобразуеся в дворгчный код, который записывает в соответствующие ячейки счетчик 5.
В другие ячейки счетчика 5 записываются сигналы, поступающие от остальных датчиков. TaKiiM образом, счетчике 5 записана кодовая комбинация, характеризующая конкретную деталь, захваченную схватом с учетом ее пространственной ориентации. Для различных деталей или при различной пространственной ориентации деталей эти комбинации различны. Таким образом, необходимо определить кодовую комбинацшо, записанную в счетчик З.Это позволит выбрать соответствующую подпрограмму работы устройства.
Для определения кодовой комбинации, записанной в счетчик 5, на вход последнего подаются гмпульсы до переполнения счетчика. Такое же число импульсов подается на вход регистра 8 сдвига. После отключения генератора 7 положение единичного сигнала в регистре 8 сдвига показывает кодовую комбинацию, записанную в счетчике 5, а следовательно, деталь захвата в схвате манипулятора и ее пространственную ориентацию. Информация из регистра 8 сдвига поступает в блок 10, где происходит выбор соответствующей подпрограммы.
Синхронизации работы блока 10 и работы регистра 8 не требуется, так как регистр 8 сдвига и блок 10 включены последовательно. Необходимо осуществить передачу информации из регистра 8 сдвига в блок 10 после обнуления счетчика 5. Это осуществляется следующим образом. Регистр 8
3574
сдвига связан с блоком 10 через бток 9. Один из входов блока 9 через инвертор 12 связан с выходом элемента НЛИ 6. Если в счетчике 5 записана кодовая комбинация, то на выходе злемента ШШ 6 имеется единичньш. сигнал, который инвертируется, инвертором 12 и препятствует прохождению сигнала из регистра 8 сдвига в блок
10. При обнулении счетчика 5 на выходе элемента ИЛИ 6 - нулевой сигнал, а на выходе инвертора 12 - единичный сигнал. Такш-i образом, при переполнении (обнулении) счетчика 5 информа-
ция из регистра 8 возможность поступить в блок 10.
Блок IО управления сортированием может иметь различную конструкцию, которая зависит от выбранного носителя программы. Например, это может
быть штекерная панель. Штекерная панель позволяет пут.ем установки штекеров выбрать последовательность, работы исполнительных органов.
Для отработки той или иной програм- , набранной на штекерной панели, между гнездами панели должны быть диодные развязки, позволяющие выбирать ту или иную подпрограмму
при поступлении соответствующего сигнала с регистра 8 сдвига.
При использовании штекерной панели программа вводится путем установки штекеров.
В качестве носителя программы может быть перфолента или магнитная лента. Если используется перфолента, то при поступлении определенного сигнала с регистра сдвига
считываются и отрабатьтаются опре- деленные кадры перфоленты, определяющие подпрограмму.
Если используется магнитная лен- та, то считывается и отрабатьшает- ся определенный участок магнитной ленты, определяемый по контрольной метке. Ввод программ в этих случаях осуществляется установкой подготов-- ленной перфоленты или магнитной ленты.
Таким образом, блок 10 управле- .ния сортированием может иметь различную конструкцию. Общей чертой для различных конструкций блока 10 является то, что подпрограмма считывается, если управляющий сигнал (с выхода регистра 8 сдвига) приходит
а соответству 01дт-1 вход включения одпрограммы.
После включения устройство ра- о сает следующим образом.5
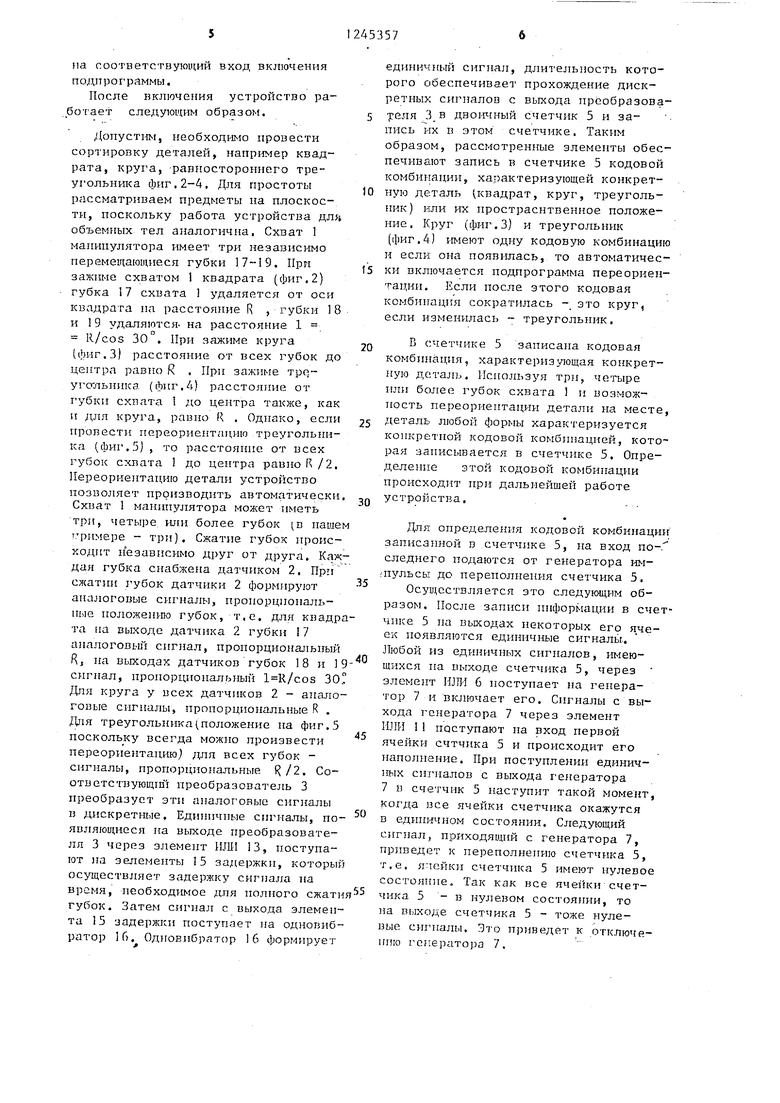
oпycтим, необходимо провести ортировку деталей, например квадата, круга, равностороннего трегольника фиг.2-4, Для простоты JQ рассматриваем предметы на плоскости, поскольку работа устройства для; объемргых тел аналогична. Схват 1 манипулятора имеет три независимо перемещающиеся губки 17-19. При зажиме схватом 1 квадрата (фиг.2) губка 17 схвата 1 удаляется от оси квадрата на расстояние R , губки 18 и 19 удаляются- на расстояние 1 R/COS 30°. При зажиме круга Q (фиг.З) расстояние от всех губок до центра равно R . При зажиме тре,- yrooibHHKa (фиг.4) расстояние от губки схпата 1 до центра также, как и для круга, равно R . Однако, если 25 провести пареориентацию треугольника (фиг,5), то расстояние от всех губок схвата до центра равной/2. Переориентацию детали устройство позволяет нроизводить автоматически, ц Схват 1 манипулятора может иметь три, четыре или более губок в нашем г рнмере - три). Сжатие губох нроис- ходит н езависимо Д1)уг от друга. К.чж- дая губка снабжена датчиком 2. При сжатии З убок датчики 2 формиру от аналоговые сигналы, пропорциональные ноложеиию губок, т.е. для квадрата на выходе датчика 2 губки 17 аналоговый сигнал, пропорциональный R, на выходах датчиков губок 18 и 19- снгнал, пропорциональный l R/cos 30, Для круга у всех датчиков 2 - аналоговые сигналы, пропорц1Ю} альные R . Для треугольника(положение на фиг.5 поскольку всегда можно произвести переориентацию для всех губок - сигналы, пропорциональные R/2. Со- ответствующш преобразователь 3 преобразует эти аналоговые сигналы 13 дискретные. Единичные сигналы, по- являющиеся па выходе преобразователя 3 через злемепт ИШ1 13, поступают на зелементы 15 задержки, который осуществляет задерл(ку сигнала на время, необходимое для нолного сжатия губок. Затем сигнал с выхода элемента 15 задержки поступает на одногзиб- ратор 16. Од1говибратор 16 формирует
35
45
Q 5 ц
5
единичный сигнал, длительность которого обеспечивает прохождение дискретных сигналов с выхода преобразова- уеля 3 в двоичный счетчик 5 и запись их в этом счетчике. Таким образом, рассмотренные элементы обеспечивают запись в счетчике 5 кодовой комбинации, хат)актеризуюш;ей конкретную деталь (квадрат, круг, треуголь- 1ик) или их простраснтвенное положение. Круг (фиг.З) и треугольник (фиг.4) имеют одну кодовую комбинацию и если она появилась, то автоматически включается подпрограмма переориентации. Если после этого кодовая комбинация сократилась -, это круг, если изменилась - треугольник.
В счетчике 5 записана кодовая комбинация, характеризу ощая конкретную дата;п... Используя три, четыре или более губок схвата 1 и возмож- пость переориентации детали на месте, деталь любой формы характеризуется конкретной кодовой комбгншцпей, которая занисывается в счетчике 5. Определение этой кодовой комбинации происходит при дальнейшей работе устройства.
Для определения кодовой комбинацигг записанной в счетчике 5, на вход по-. следнего подаются от генератора им- ;пульсы до переполнения счетчика 5.
Осуществляется это следующим образом. После записи информации в счетчике 5 ца выходах некоторых его ячеек появляются единичные сигналы. Любой из едигшчных сигналов, имеющихся па выходе счетчика 5, через элемент ШТИ 6 поступает на генератор 7 и включает его. Сигналы с выхода генератора 7 через элемент ПЛИ 11 поступают па вход первой ячейки счтчпка 5 и происходит его наполнение. При поступлении единичных сигпалов с выхода генератора 7 в счетчик 5 наступит такой момелт, когда все ячейки счетчика окажутся в едшп-ргном состоянии. Следующий сигнал, п)риходящий с генератора 7, приведет к переполнению счетчика 5, т.е. я-тейки счетчика 5 имеют нулевое состояние., Так как все яче1П и счетчика 5 - в нулевом состоянии, то на выходе счетчика 5 - тоже нулевые сигналы, Это приведет к отключению генератора 7.
7
В результате в зависимос ти от того, какая кодовая комбинация записана в счетчике 5,генератор 7 выработает такое число импульсов, которое приведет к переполнен}по счетчика 5. Например, в нашем случа счетчик состоит из трех ячеек. В этом счетчике может быть записано число 7. С преобразователя 3 в счетчик записано число 2, Для переполнения счетчика 5 в этом случае нужно 6 импульсов. Если в счетчике записано число 4, необходима 4 импульса, и т.д. Зная сколько импульсов необходимо для переполнения счетчика 5, можно определить кодову комбинацию, записанную в этом счетчике. Эта кодовая комбинация характеризует конкретную деталь, захваченную охватом 1 манипулятора. При зтом определяется число импульсов, поступивших в счетчик 5. В исходном состоянии в первой ячейке регистра 8 сдвига записана единица, во всех остальных - нули.
Единичные сигналы с выхода генератора 7 поступают на вход счетчика .5 и вход регистра 8 сдвига. Таким образом, единичный сигнал в регистре 8 сдвига определяет кодовую комбинацию, записанную в счетчике 5, а следовательно, деталь, зажатую в схвате 1.
Регистр 8 сдвига связан с блоком 10 через блок 9 ключей, поэтому изменение состояния регистра 8 сдвига при перемещении единицы не влия10
2453578
ет на работу блока 10. Так как один из входов блока 9 ключей через инвертор 12 связан с выходом элемента ИЛИ 6. Если в счетчике 5 записа- 5 на кодовая.комбинация, то на вькоде элемента ИЛИ 6 лмеется единичный . сигнал, который инвертируется элементом 12 и препятствует прохождению сигнала из регистра 8 сдвига, в блок 10. При обнулении счетчика 5 (в регистре 8 сдвига - информация, характеризующая захваченную схватом 1 деталь) на выходе элемента ИЛИ 6 - нулевой сигнал, а на выходе инвертора 12 - единичный. Таким образом, информация из регистра 8 сдвига поступит в блок 10. Сигнал, поступающий в блок 10, характеризует деталь, зажатую в схвате 1 и позволяет выбрать подпрограмму работы манипуляционного механизма.
В конце каждой подпрограммы происходит разжатие губок схвата 1. Разжатие губок схвата приводит к тому, что сигналы датчиков 2 становятся нулевыми. Сигналы на выходах соответ- р ствующего преобразователя 3 также ity- левые. На выходе элемента ИЛИ 13, соединенного с выходом инвертора 14,- также нулевой сигнсш. Следователь15
20
25
30
но, на выходе инвертора 14 - единичный сигнал, который поступает на шину установки регистра 8 сдвига в исходное состояние.
Использование предлагаемого изобретения позволяет повысить эффективность- сортировки деталей.
-d
Ф Ф Ф Ф Ф
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНОЙ ИНФОРМАЦИИ | 1990 |
|
RU2022470C1 |
| Устройство для считывания номера транспортного средства | 1983 |
|
SU1169871A1 |
| Устройство для формирования тестов | 1988 |
|
SU1543408A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1987 |
|
SU1518894A2 |
| Устройство для передачи информации | 1989 |
|
SU1700571A1 |
| Устройство для приема сигналов с избыточностью | 1983 |
|
SU1128281A1 |
| Селектор импульсов заданной кодовой комбинации | 1982 |
|
SU1131032A1 |
| Кодовый преобразователь | 1985 |
|
SU1285605A1 |
| Устройство для управления преобразователем постоянного напряжения в многоступенчатое квазисинусоидальное | 1983 |
|
SU1319206A1 |
17
Фиг.2
Фиг-д
Составитель С.Алексанов
Редактор Л.Гратилло Техред о.Сопко
Заказ 3941/5 Тираж 565Подписное;
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Фиг. Ч
Фиъ.Ъ
Корректор А.Зимокосов
| Патент CPIA № 4348276, кл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| . | |||
