10
захватов. Рычажный механизм 25 имеет возвратную аружиму 31. Пластинчатая пружина 32 служит для удержания в исходном положении рычага 2 под углом к направлений движения каретки. Упор 10 исходного.положения закреплен на верхИей раме 33 шпулярника н подпружинен пружиной 34.
Автоматизированный шпулярник рабо- таег следующим образом.
После установки одной из паковок 5 на паковкодержатель 4 каретка 2 начинает перемешаться в исходное положение к месту загрузки очередной паковки. Рычаг 2 нитесьединителя находится под углом по
Изобретение относится к текстильной промышленности, в частности к шпулярни- кам сновальных машин, и является усовершенствованием известного автоматизированного шпулярника по авт. св. № 1089185. Цель изобретения - упрощение обслуживания за счет механизации процесса соединения сматываемых с паковок нитей.
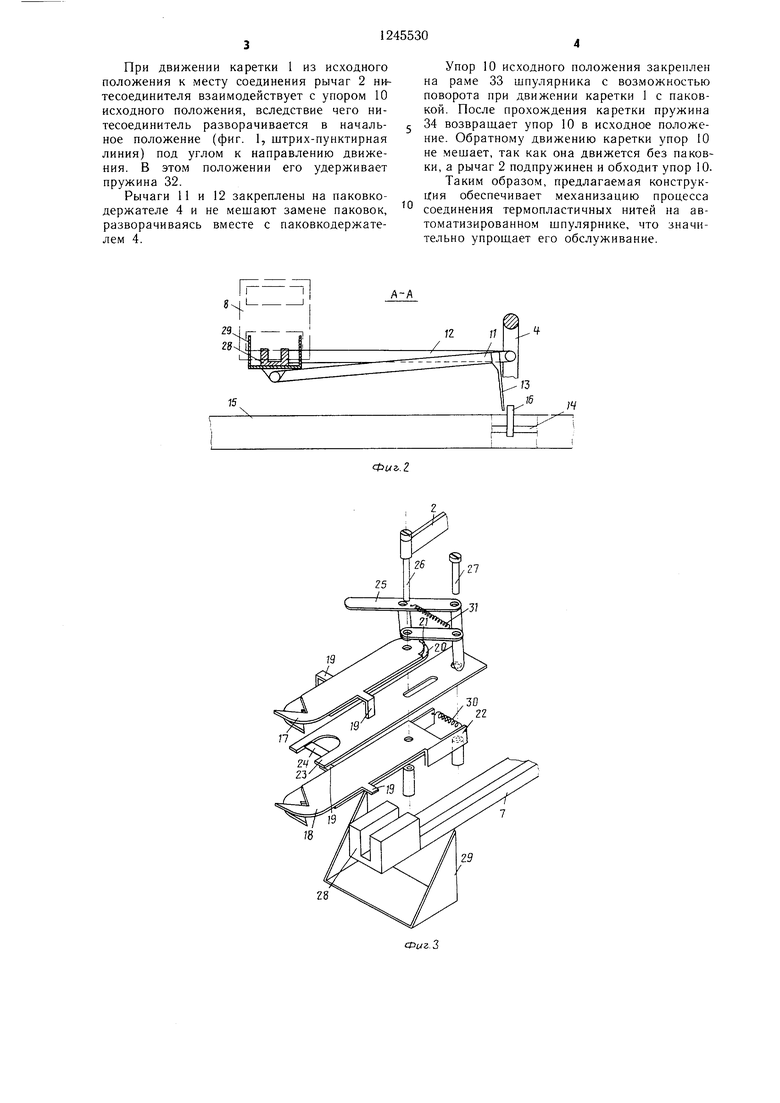
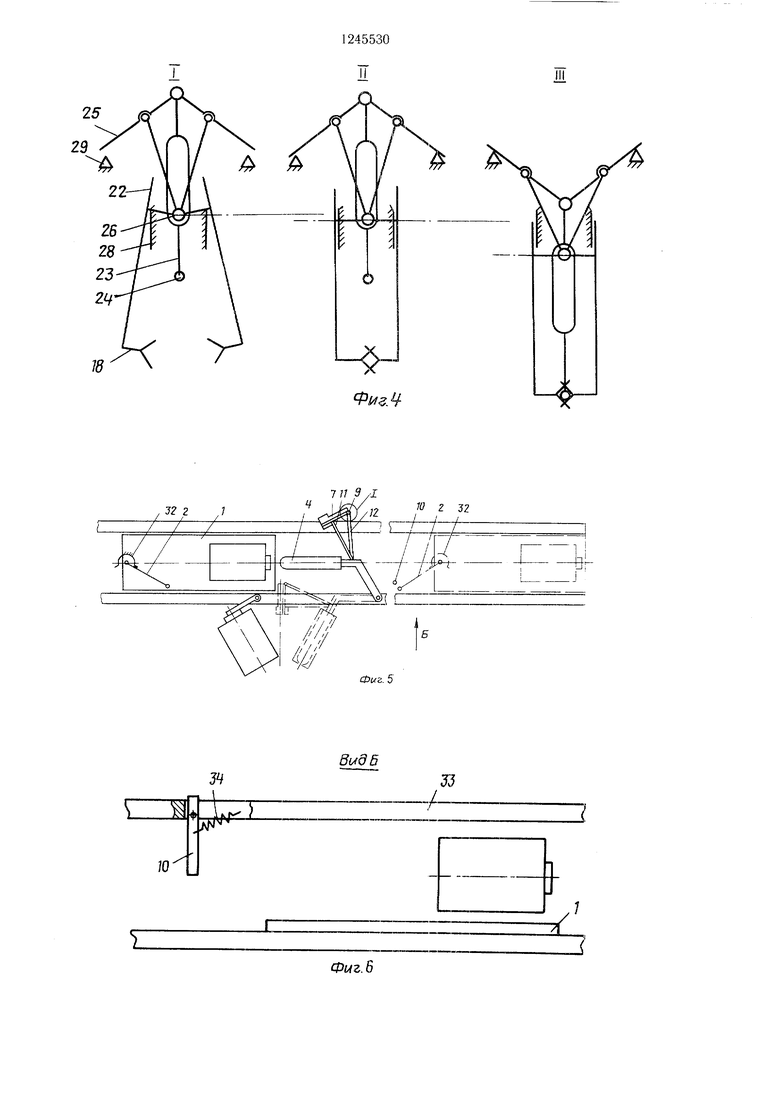
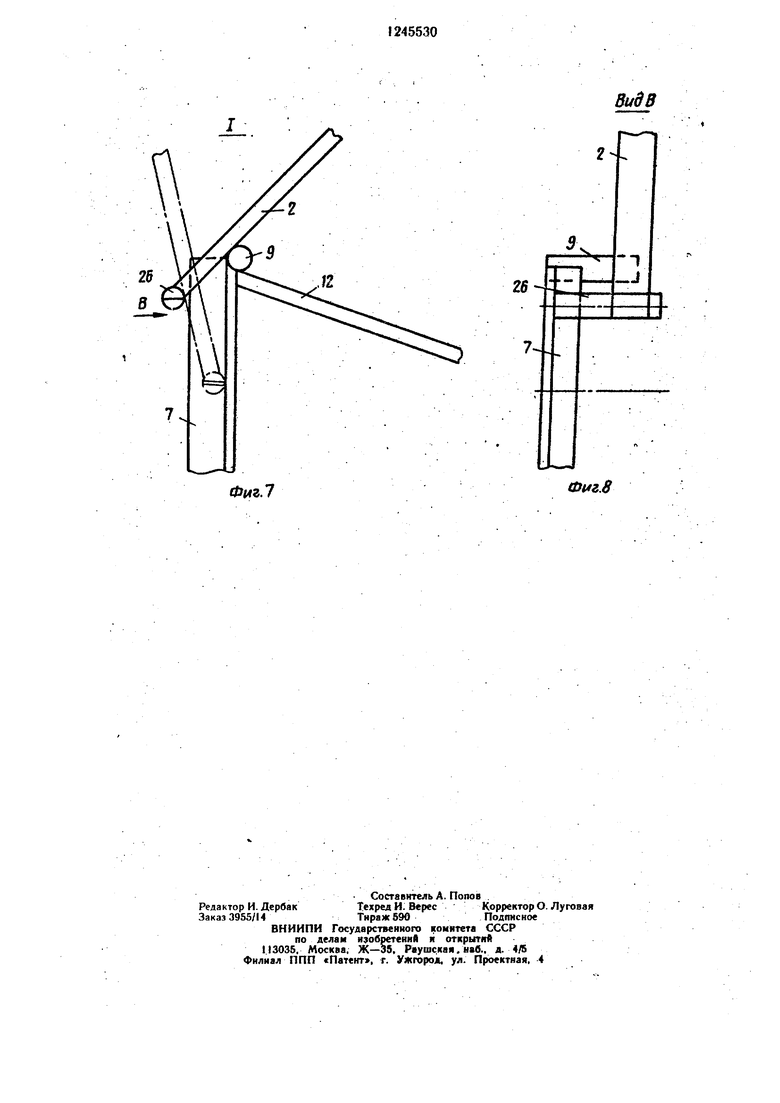
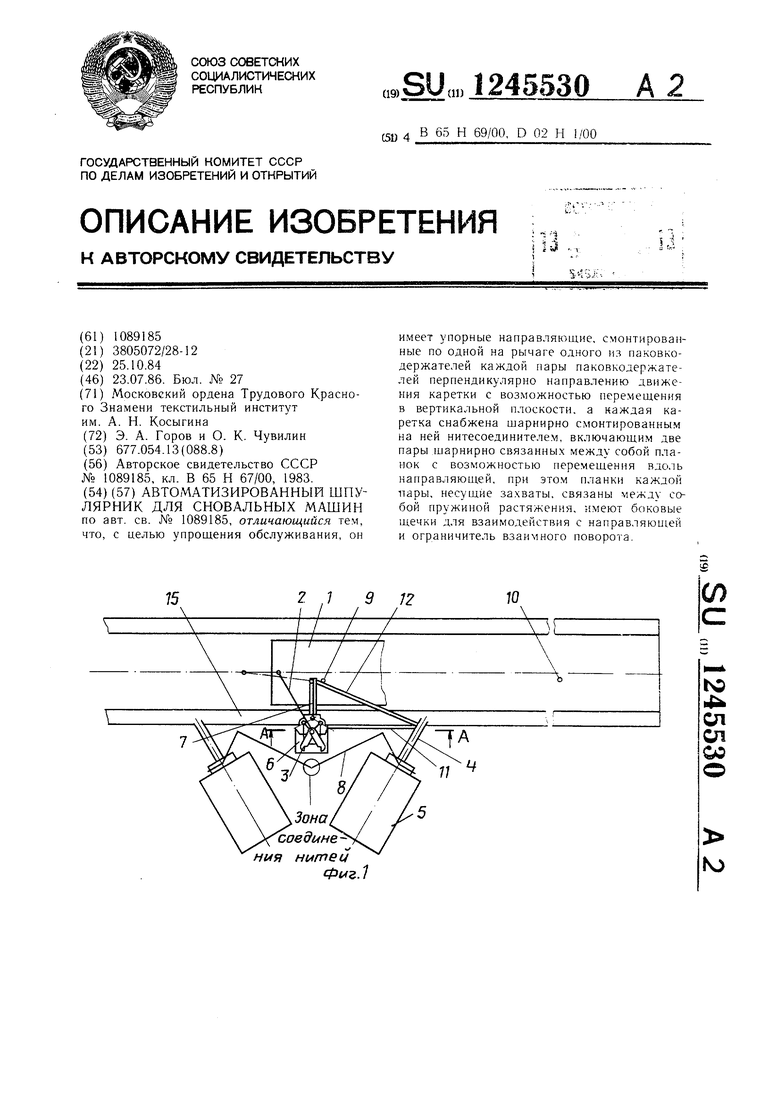
На фиг. 1. изображено одно рабочее место шпулярника и каретка, ,плаН; на фиг. 2 - разрез А-А на фиг. 1 (каретка и ните- соединитель не показаны); на фиг. 3 - нитесоединитель и упорная направляющая, подетально в разобранном виде; на фиг. 4 - кинематическая схема трех фаз работы нитесоединителя; на фиг. 5 -- ис- ,5 отношению к направлению движения карет- ходное положение «каретки и паковкодер- ки I (фиг. 1,штрих-пунктирная линия). При жателей (показаны штрих-пунктирной ли- наезде нитесоединителя на упорную на- нией) и положение каретки перед началом правляющую 7 ось 26 ннтесоединителя 3 установки новой паковки; на фиг. 6 - перемещается вдоль направляющей пер- вид Б на фиг. 5; на фиг. 7 - узел I пендикулярно направлению движения ка- иа фиг. 5; на фиг. 8 - вид Г на фиг. 7. 0 ретки 1. Под действием пружины 30 план- С кареткой I шпулярника шарнирно свя- кИ 17 и 18 захватов находятся в раскры- зан рычаг 2 нитесоедннителя 3. Между каждой парой паковкодержателей 4с установленными на них паковками 5 смонтирована
головка 6 упорной направляющей 7, .выпол- 25 22 взаимодействуют с направляю- иенной в виде уголка. Паковки 5 имеют щими планками 28, вследствие чего планки 17 и 18 с захватами соединяются, зажимая соединяемые нити: При взаимодействии рычажного механизма 25 с выступами 29 пронсходит перемещение держате- 30 ля 23 термосоединителя относительно планок 17 и 18 с закрепленными в захватах со гдиняемыми нитями. Термоэлемент 24, разогретый током от источника, размещенного на карелке, сваривает термопластичные нити.
При дальнейшем движении каретки планки 17 и 18 выводят соединенные нити из зажимов 8 паковок 5, нитесоединитель 3 Движется назад, щечки 22 перестают взаимодействовать с направляющими планкаНитесоединитель 3 имеет Две Пары пла- jjo 28 и захваты планок 17 и 18 освобож- нок 17 и 18 с захватами нитей, выполнен- дают нити. Под действием возвратной пру- Ных в виде V-образных вырезов, направ- жины 31 держатель 23 перемещается назад, ленных навстречу одни другому. Планки Выход ниtecoeдинитeля из направляющей 7 17 и 18 связаны между собой пластинами происходит тогда, когда рычаг 2 взаимо- 19. Планки 17 и 18 каждой пары связаны действует с упором 9 разворота. Нитесое- между собой шарнирно. На опорнЬм конце 45 динитель ориентируется параллельно ра- планок 17 имеется вырез 20 в виде сектора ме 15 шпулярника и при дальнейшем двитом положении. Ограничивает угол раскрытия захватов вырез 20 и ограничитель 21. При подходе к зоне соединения нитей
зажимы 8 концов нитей. На головке 6 смонтирован упор 9 для разворота нитесоединителя. На шпулярнике в месте загрузки каретки ,Л паковками имеется упор 10 ис- хоДь;ого положения нитесоединнтеля 3.
Головка 6 упорной направляющей связана с одним из паковкодержателей 4 рычагом II, закрепленным .на головке 6 и паковкодержателе 4 шарнирно. Рычаг 12 связан с упорной направляющей 7 шарннрно, а с паковкодержателем 4 - жестко. На 55 рычаге И закреплена планка 13, а шток 14, расположенный в раме 15 шпулярника, имеет толкатель 6.
и ограничитель 21 взаимного поворота. Не планках 18 имеются шаечки 22.
Термосоединитель состоит из держателя
женн1И каретки 1 к исходному положению взаимодействует с другими упорами.
Рычаг 11 осуществляет установку упора 29 в верхн или нижне- положение.
23, термоэлемента 24 и рычажного меха-,« jjii t или ни/кпее нилилчгние. низма 25. Ось 26 связывает рычаг 2, план-Подъем рычага 11 происходит при перемени 17 и 18 и держатель 23 термосоедините-щении штока 14, который через толка- ля, расположенный между парами планоктсль 16 воздействует на планку .13. Опус- 17 и 18. Головка 6 упорной направляющей кание рычага М происходит под действи- «мест Направляющие планки 28 для взаимо-ем собственной тяжести при обратном дви- действия со щечками 22 планок 18 и сим-55 жения штока 14 (нижнее положение упора
метрнчно расположенные выступы 29. Плёнки 18 связаны между собой пружиной 30 растя же1)ия, обеспечивающей раскрытие
показано на фиг. 2). Рычаг 12 удерживает направляющую 7 всегда на одном уровне.
0
захватов. Рычажный механизм 25 имеет возвратную аружиму 31. Пластинчатая пружина 32 служит для удержания в исходном положении рычага 2 под углом к направлений движения каретки. Упор 10 исходного.положения закреплен на верхИей раме 33 шпулярника н подпружинен пружиной 34.
Автоматизированный шпулярник рабо- таег следующим образом.
После установки одной из паковок 5 на паковкодержатель 4 каретка 2 начинает перемешаться в исходное положение к месту загрузки очередной паковки. Рычаг 2 нитесьединителя находится под углом по
,5 отношению к направлению движения карет- ки I (фиг. 1,штрих-пунктирная линия). При наезде нитесоединителя на упорную на- правляющую 7 ось 26 ннтесоединителя 3 перемещается вдоль направляющей пер- пендикулярно направлению движения ка- 0 ретки 1. Под действием пружины 30 план- кИ 17 и 18 захватов находятся в раскры-
тношению к направлению движения карет- и I (фиг. 1,штрих-пунктирная линия). При наезде нитесоединителя на упорную на- правляющую 7 ось 26 ннтесоединителя 3 перемещается вдоль направляющей пер- пендикулярно направлению движения ка- ретки 1. Под действием пружины 30 план- кИ 17 и 18 захватов находятся в раскры-
22 взаимодействуют с направляю- щими планками 28, вследствие чего планки 17 и 18 с захватами соединяются, зажимая соединяемые нити: При взаимодействии рычажного механизма 25 с выступами 29 пронсходит перемещение держате- ля 23 термосоединителя относительно планок 17 и 18 с закрепленными в захватах со гдиняемыми нитями. Термоэлемент 24, разогретый током от источника, размещенного на карелке, сваривает термопластичные нити.
том положении. Ограничивает угол раскрытия захватов вырез 20 и ограничитель 21. При подходе к зоне соединения нитей
28 и захваты планок 17 и 18 освобож- дают нити. Под действием возвратной пру- жины 31 держатель 23 перемещается назад, Выход ниtecoeдинитeля из направляющей 7 происходит тогда, когда рычаг 2 взаимо- действует с упором 9 разворота. Нитесое- динитель ориентируется параллельно ра- ме 15 шпулярника и при дальнейшем движенн1И каретки 1 к исходному положению взаимодействует с другими упорами.
Рычаг 11 осуществляет установку упора 29 в верхн или нижне- положение.
jjii t или ни/кпее нилилчгние. Подъем рычага 11 происходит при перемещении штока 14, который через толка- тсль 16 воздействует на планку .13. Опус- кание рычага М происходит под действи- ем собственной тяжести при обратном дви- жения штока 14 (нижнее положение упора
jjii t или ни/кпее нилилчгние. Подъем рычага 11 происходит при перемещении штока 14, который через толка- тсль 16 воздействует на планку .13. Опус- кание рычага М происходит под действи- ем собственной тяжести при обратном дви- жения штока 14 (нижнее положение упора
показано на фиг. 2). Рычаг 12 удерживает направляющую 7 всегда на одном уровне.
При движении каретки 1 из исходного положения к месту соединения рычаг 2 ни- тесоединителя взаимодействует с упором 10 исходного положения, вследствие чего ни- тесоединитель разворачивается в начальное положение (фиг. 1, штрих-пунктирная линия) под углом к направлению движения. В этом положении его удерживает пружина 32.
Рычаги 11 и 12 закреплены на паковко- держателе 4 и не мешают замене паковок, разворачиваясь вместе с паковкодержате- лем 4.
Упор 10 исходного положения закреплен на раме 33 шпулярника с возможностью поворота при движении каретки 1 с паковкой. После прохождения каретки пружина 34 возврашает упор 10 в исходное положение. Обратному движению каретки упор 10 не мешает, так как она движется без паковки, а рычаг 2 подпружинен и обходит упор 10. Таким образом, предлагаемая конструкция обеспечивает механизацию процесса соединения термопластичных нитей на автоматизированном шпулярнике, что значительно упрош,ает его обслуживание.
А-А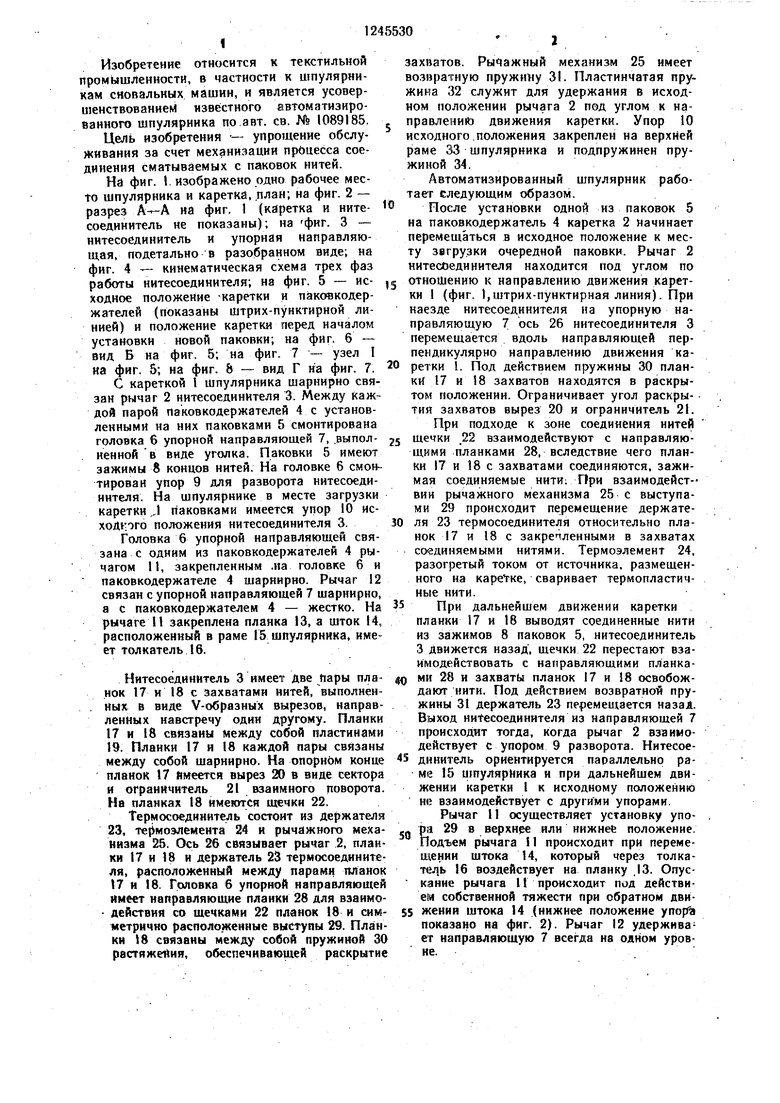
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный шпулярник для сновальных машин | 1984 |
|
SU1280053A1 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Автоматизированный шпулярник для сновальных машин | 1982 |
|
SU1052579A1 |
| Автоматизированный шпулярник для сновальных машин | 1985 |
|
SU1266905A2 |
| Устройство для съема паковок на текстильной машине | 1990 |
|
SU1776704A1 |
| Устройство для приема и отвода паковок от машин формования химических нитей | 1983 |
|
SU1138377A2 |
| Шпулярник текстильной машины | 1977 |
|
SU735541A1 |
| Паковкодержатель | 1987 |
|
SU1505873A1 |
| ПОДОБНЫХ МАШИН | 1973 |
|
SU397569A1 |
Ю
28
25
18
L.
x
77/ 5/1
t kTV .. /0 г 32
12
- r-7-/-f.. /0 г 32
12
- r-7-/-f
rt
ih 7/
1 //y
///
Q5t/a 5
34
Фиг. 6
J.
Виде
26
1 J
Фtлг.
Ф1лг.8
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
