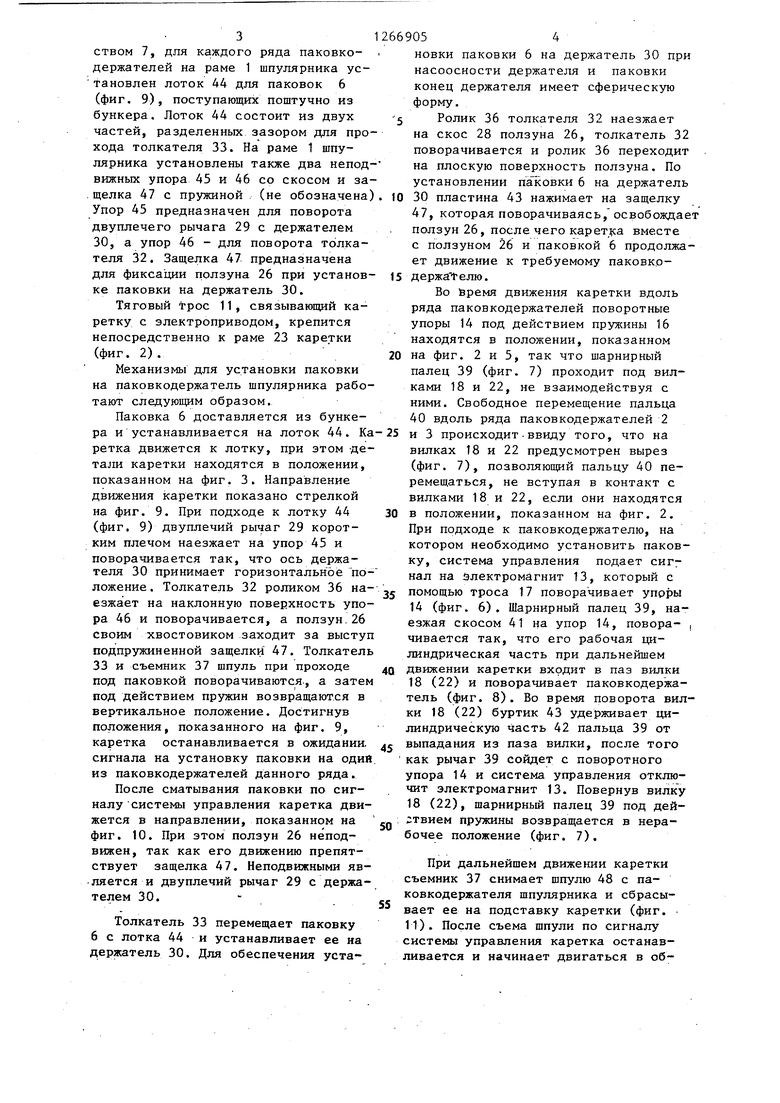
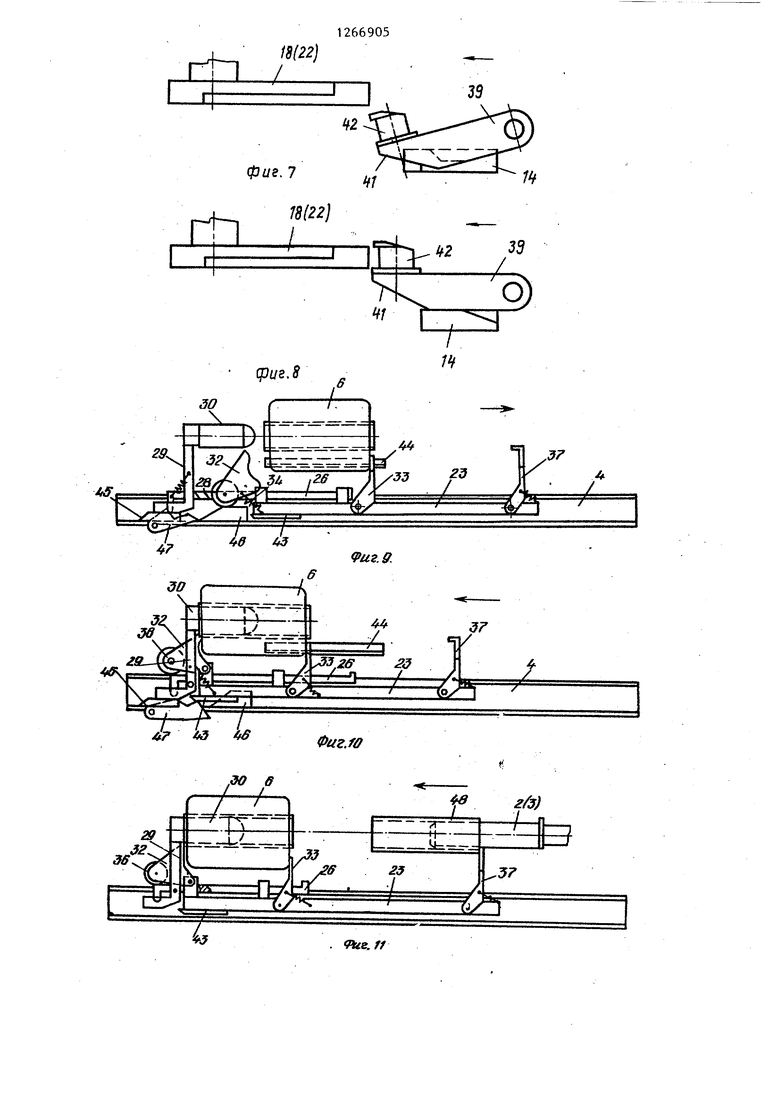
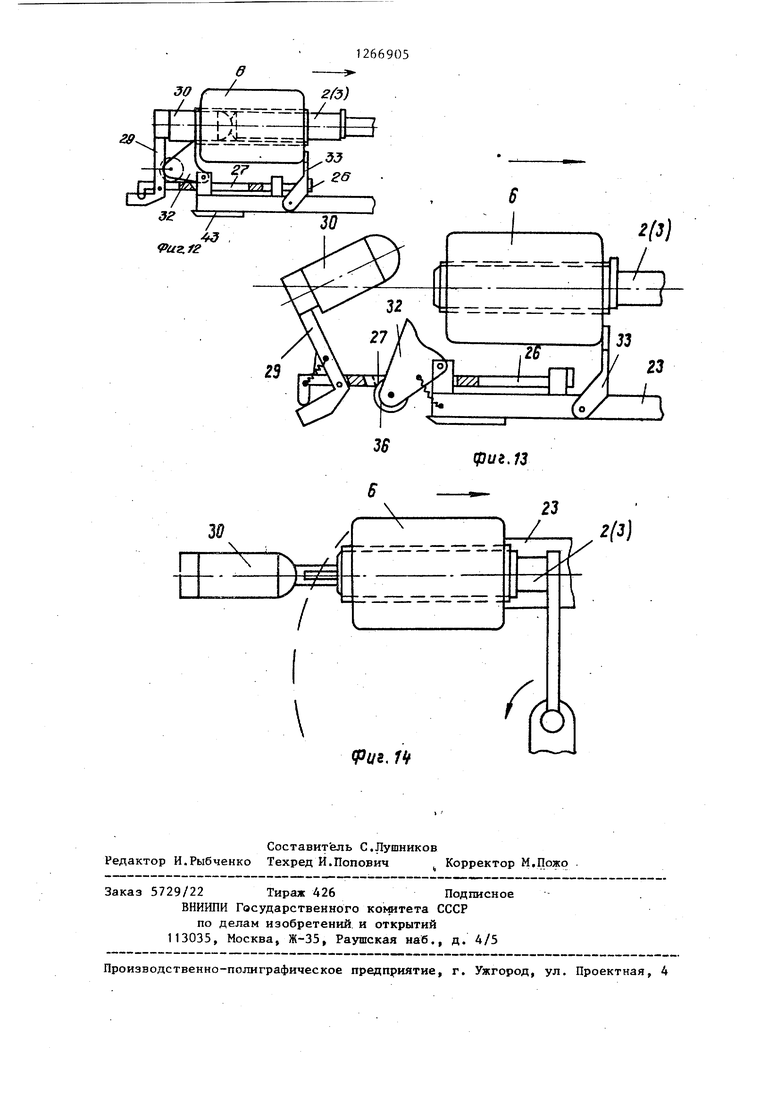
1 Изобретение относится к текстильному машиностроению и является усовершенствованием автоматизированного шпулярника для сновальных машин по авт. св. № 1089185. Цель изобретения - повьшение надежности в работе. На фиг. 1 изображен автоматизированный шпулярник, общий вид на , фиг. 2 - паковкодержатели, каретка, электропривод и электромагнит с поворотными упорами, вид сверху, в момент начала взаимодействия одного из пальцев с вилкой; на фиг. 3 каретка, обш;ий вид-, на фиг. 4 - то же, вид сверху; на фиг. 5 - поворот ные упоры в нерабочем положенииj на фиг. 6 - то же, в рабочем положении на фиг. 7 - шарнирный палец, каретки в нерабочем положении; на фиг. 8 то же в рабочем положении; на фиг. 9 - каретка в начальный момент установки паковки на держатель; на . 10 - каретка с паковкой, установленной на держательJ на фиг.11 каретка в момент съема шпули с паковкодержателя шпулярника, на фиг. 12 то же в момент установки паковки на паковкодержатель шдулярника; на фиг. 13 - то же, после установки па ковки на паковкодержатель шпулярника; на фиг. 14 - то же, в момент по ворота паковки с паковкодержателем в рабочее положение, вид сверху. Шпулярник содержит раму 1, на ко торой имеется несколько рядов паков кодержателей 2 и 3, расположенных попарно так, что оси установленнык на них паковок пересекаются. Паковкодержатели имеют возможность повор та вокруг вертикальной оси. Вдоль каждого ряда паковкодержателей проложены направляющие 4, по которым перемещаются каретки 5, несущие на себе паковки 6. С одной стороны в торцовой части шпулярника расположе бункер с загрузочным устройством 7 для установки паковки на каретку и механизм для сбрасывания шпули. С противоположной стороны шпулярника на каждом ряду паковкодержателей расположены электродвигатели 8, редуктор 9, на выходном валу которого закреплен барабанчик10 с винтовой нареЛой для наматывания тягового троса 11. На каждом ряду паковкодер жателей со стороны противоположной электродвигателю 8, установлены шки 5 12 для направления троса 11 и электромагнит 13 (фиг. 2), у, каждого из паковкодержателей - поворотные упоры 14 со скосом 15 и пружиной 16, к оторые связаны с электромагнитом 13 с помощью троса 17. Электромагнит 13 с помощью троса 17 поворачивают упоры 14 на угол 90° (фиг. 5 и 6). На оси паковкодержателя 2 жестко закреплена вилка 18, на оси паковкодержателя 3 - коромысло 19, которое через шатун 20 и коромысло 21 подвижно связано с вилкой 22. Шарнирнорычажный механизм обеспечивает поворот паковкодержателя 3 на требуемый угол. Каретка (фиг. 3) содержит раму 23 с колесами 24 и 25, на которой установлен ползун 26, имеющий возможность перемещения относительно рамы 23 в направлении продольной оси каретки. На ползуне 26 имеется отверстие 27 со скосом 28 и шарнирно установлен двуплечий рычаг 29 с держателем-30 полной паковки. Без паковки под действием пружины 31 рычаг 29 и держатель 30 находятся в наклонном положении. Жесткость пружины 31 должна быть такой, чтобы под действием силы веса паковки ось держателя 30 находилась в горизонтальном положении. На раме 23 каретки шарнирно установлены толкатели 32 и 33 с пружинами 34 и 35. Толкатель 32 имеет ролик 36, который .под действием пружины 34 прижимается к ползуну 26. Когда ролик 36 попадает в отверстие 27 ползуна, толкатель 32 занимает наклонное положение (фиг. 3). Толкатель 33 под действием пружины 35 находится в вертикальном положении. На раме 23 каретки установлен также съемник 37 шпуль с пружиной 38. Каретка 23 снабжена шарнирным пальцем 39 и пальцем 40, неподвижно закрепленным на каретке. Шарнирный палец 39 выполнен Г-образной формы со скосом 41 и под действием пружины (не обозначена) находится в положении, показанном на фиг. 7. Цилиндрическая рабочая часть 42 пальца имеет буртик для предотвращения выпадания пальца из прорези вилки 18 (22). при ее повороте. В нижней части каретки 23 установлена нажимная пластина 43. В торцовой части шпулярника, где расположен бункер с загрузочным устрой31
ством 7, для каждого ряда паковкоержателей на раме 1 шпулярника установлен лоток 44 для паковок 6 (фиг. 9), поступающих поштучно из бункера. Лоток 44 состоит из двух частей, разделенных зазором для прохода толкателя 33. На раме 1 шпулярника установлены также два неподвижных упора 45 и 46 со скосом и защелка 47 с пружиной . (не обозначена) пор 45 предназначен для поворота вуплечего рычага 29 с держателем 30, а упор 46 - для поворота толкателя 32. Защелка 47 предназначена ля фиксации ползуна 26 при установке паковки на держатель 30.
Тяговый трос 11, связывающий каретку с электроприводом, крепится непосредственно к раме 23 каретки (фиг. 2).
Механизмы для установки паковки на паковкодержатель шпулярника рабоают следующим образом.
Паковка 6 доставляется из бункера и устанавливается на лоток 44. Каретка движется к лотку, при этом -детали каретки находятся в положении, показанном на фиг. 3. Направление движения каретки показано стрелкой на фиг. 9. При подходе к лотку 44 (фиг. 9) двуплечий рычаг 29 коротким плечом наезжает на упор 45 и
поворачивается так, что ось держателя 30 принимает горизонтальное Ъо- ложение. Толкатель 32 роликом 36 наезжает на наклонную поверхность упора 46 и поворачивается, а ползун.26 своим хвостовиком заходит за выступ подпружиненной защелки 47. Толкатель 33 и съемник 37 шпуль при проходе под паковкой поворачиваются-, а затем под действием пружин возвращаются в вертикальное положение. Достигнув положения, показанного на фиг. 9, каретка останавливается в ожидании, сигнала на установку паковки на одни, из паковкодержателей данного ряда.
После сматывания паковки по сигналу системы управления каретка движется в направлении, показанном на иг. 10. При этом ползун 26 неподвижен, так как его движению препятствует защелка 47. Неподвижными является и двуплечий рычаг 29 с держателем 30.
Толкатель 33 перемещает паковку 6 с лотка 44 и устанавливает ее на ержатель 30. Для обеспечения уста669054
новки паковки 6 на держатель 30 при насоосности держателя и паковки конец держателя имеет сферическую форму.
5 Ролик 36 толкателя 32 наезжает на скос 28 ползуна 26, толкатель 32 поворачивается и ролик 36 переходит на плоскую поверхность ползуна. По установлении паковки 6 на держатель
10 30 пластина 43 нажимает на защелку 47, которая поворачиваясь, освобождает ползун 26, после чего карет са вместе с ползуном 2б и паковкой 6 продолжает движение к требуемому паковко15 держаТелю.
Во йремя движения каретки вдоль ряда паковкодержателей поворотные упоры 14 под действием пружины 16 находятся в положении, показанном 20 на фиг. 2 и 5, так что шарнирный палец 39 (фиг. 7) проходит под вилками 18 и 22, не взаимодействуя с ними. Свободное перемещение пальца 40 вдоль ряда паковкодержателей 2
25 и 3 происходитввиду того, что на вилках 18 и 22 предусмотрен вырез (фиг. 7), позволяющий пальцу 40 перемещаться, не вступая в контакт с вилками 18 и 22, если они находятся 30 в положении, показанном на фиг. 2. При подходе к паковкодержателю, на котором необходимо установить паковку, система управления подает сигнал на Электромагнит 13, который с
5 помощью троса 17 поворачивает упоры 14 (фиг. 6). Шарнирный палец 39, наезжая скосом 41 на упор 14, повора- , чивается так, что его рабочая цилиндрическая часть при дальнейшем
Q движении каретки входит в паз вилки 18 (22) и поворачивает паковкодержатель (фиг. 8). Во время поворота вилки 18 (22) буртик 43 удерживает цилиндрическую часть 42 пальца 39 от
5 выпадания из паза вилки, после того как рычаг 39 сойдет с поворотного упора 14 и система управления отключит электромагнит 13. Повернув вилку 18 (22), щарнирный палец 39 под дей. гтвием пружины возвращается в нерабочее положение (фиг. 7).
При дальнейшем движении каретки съемник 37 снимает шпулю 48 с паковкодержателя шпулярника и сбрасывает ее на подставку каретки (фиг. 11). После съема щпули по сигналу системь: управления каретка останавливается и начинает двигаться в обратном направлении (фиг, 12). При этом паковкодержатель 2(3) шпулярника входит в отверстие шпули полной паковки 6 и упирается в сферическую поверхность держателя 30. Последний вместе с рычагом 29 и ползуном 26 остаются неподвижными, а.каретка, продолжая движение, с помощью толкателя 32 перемещает паковку 6 на паковкодержатель шпулярника 2 (3), После установки паковки рычаг 29 вместе с держателем 30 под действием пружины 31 занимает наклонное положение, а ролик 36 толкателя 32 попадает в отверстие 27 ползуна 26 и под действием пружины 34 переходит в положение, показанное на фиг. Зи 13. Поворот держателя 30 полной паков ки в наклонное положение осуществляется для того, чтобы дать возможность паковке 6, не касаясь держателя 30, перейти в рабочее положение при повороте паковкодержателей 2 (3) вокруг вертикальной оси (фиг. 14). Паковкодержатели 2 (3) в рабочее положение поворачиваются в результате взаимодействия пальца 40 с утолщенной стороной вилки 18 (22). При это палец 39 находится в наклонном поло жении и проходит под вилкой паковко держателей, не взаимодействуя с ним После возвращения в исходное пол жение шпуля удаляется из каретки с помощью устройства для выгрузки шпуль, а на каретку устанавливается новая паковка. В предлагаемьк механизмах, осуществляющих установку паковки с каретки на Паковкодержатели щпулярника, фиксация паковки на каретке про исходит по внутренней поверхности отверстия в шпуле. В результате обес печивается достаточно точное совпаЧ
////////////////// /////// /// ////У//// у/// 1
// Фиг i 056 дение отверстия в шпуле с паковкодержателями шпулярника, что приводит к повышению надежности механизмов, в работе. Формула изобретения 1. Автоматизированный шпулярник для сновальных машин по авт. ев. № 1089185, отличающийся тем, что, с целью повышения надежности в работе, каждая каретка имеет смонтированньй с возможностью продольного перемещения вдоль нее ползун с хвостовиком, двуплечий рычаг, на одном плече которого закреплен держатель полной паковки, два дополнительных подпружиненных поворотных толкателя для взаимодействия с полной паковкой при ее установке на держатель и съеме с него, и нажимную пластину, а каждый ряд паковкодержателей имеет смонтированные на раме взоне загрузки полных паковок по одной защелке для взаимодействия с хвостовиком ползунов и упоры для взаимодействия с дополнительным т олкателем к.аретки и свободным плечом двуплечего рычага, при этом нажимная пластина смонтирована с возможностью взаимодействия с защелкой. 2. Шпулярник по п. 1, отличающийся тем, что средство для поворота шарнирного пальца, каретки выполнено в виде поворотных упоров, установленных на раме щпулярника, а шарнирный палец каретки выполнен Г-образной формы со скосом и имеет буртик для фиксации пальца при повороте горизонтальной вилки паковкодержателя.
/// /// ///
Puz.G.
фиг. 7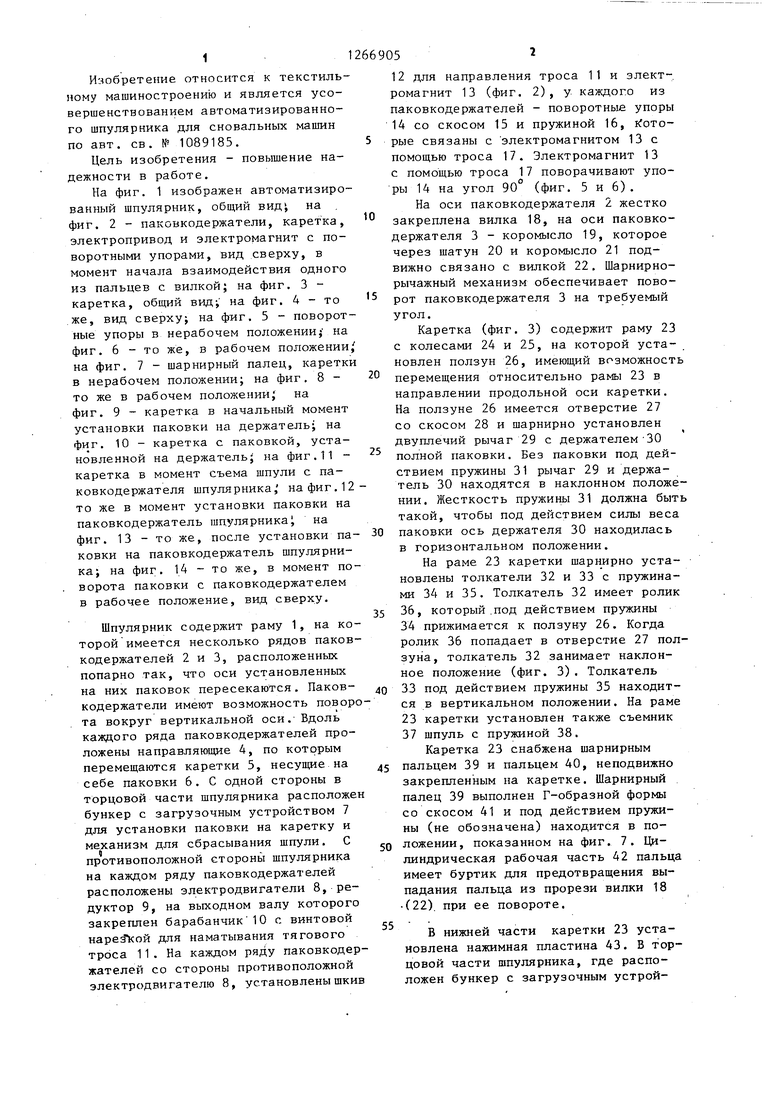
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Автоматизированный шпулярник для сновальных машин | 1982 |
|
SU1052579A1 |
| Автоматизированный шпулярник для сновальных машин | 1984 |
|
SU1280053A1 |
| Устройство для смены уточных паковок на ткацком станке | 1990 |
|
SU1808028A3 |
| Автоматизированный шпулярник для сновальных машин | 1984 |
|
SU1245530A2 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |
| Устройство для съема паковок на текстильной машине, преимущественно пневмомеханической прядильной машине | 1988 |
|
SU1671747A1 |
| Паковкодержатель | 1987 |
|
SU1505873A1 |
| Перемоточная машина для наработки стоговидных паковок | 1976 |
|
SU772965A1 |
| Устройство для приема наработанных паковок с намоточной машины и перегрузки их на транспортные средства | 1985 |
|
SU1326531A1 |
Изобретение относится к области текстильной промышленности, в частности к шпулярникам сновальных машин, и позволяет решать задачу повышения надежности работы механизмов, осуществляющих установку паковки с ка ретки на паковкодержатель шпулярника. Цель изобретения достигается тем, что на раму каждой карр.тки установлен ползун, которьш имеет возможность перемещаться вдоль продоль.ной оси каретки. На ползуне шарнирно закреплен держатель полной паковки, а на раме каретки - два толкателя, причем один толкатель предназначен для установки паковки на держатель каретки, а другой толкатель - для установки;лаковки на паковкодержатель шпулярника. На раме каретки имеются также съемник шпуль и два пальца для поворота горизонтальных вилок паковкодержателей. Управление с подвижным пальцем осуществляется с (Л помощью электромагнита и поворотных упоров, расположенных на раме шпу-. лярника. Изобретение - дополнительное к авт. св. № 1089185. 1 з. п. ф-лы. 14 ил.
i CPU г, 8 if-b iiar K-ZO) 4 9иг.9.
/ /
I
. Чге.// лР I uz.f2
39
фиг.13
цг, .Ц Yf ГЪ/
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
