2. Шпулярник по п. 1, о т л и ч а rn и и с я тем, что паковкодержш-ели 1052579 для взаиимеюг подпружиненные, рычаги toмодействия с голкагелями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный шпулярник для сновальных машин | 1985 |
|
SU1266905A2 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |
| Автоматизированный шпулярник для сновальных машин | 1984 |
|
SU1280053A1 |
| Шпулярник сновальной машины | 1981 |
|
SU985167A1 |
| Автоматизированный шпулярник для сновальных машин | 1984 |
|
SU1245530A2 |
| Устройство для смены уточных паковок на ткацком станке | 1990 |
|
SU1808028A3 |
| Устройство для съема паковок на текстильной машине, преимущественно пневмомеханической прядильной машине | 1988 |
|
SU1671747A1 |
| Шпулярник | 1978 |
|
SU859497A1 |
| Мотальная машина | 1980 |
|
SU1030288A1 |

Изобрегение относится к гекстильной промышленности и касается автомагезаци процесса установки полньдх паковок и съема пустых шпуль со шпулярников сно вальных машин.
Известен автомагизированный шпулярник, содержащий горизонтальные пакоБкодержатели, рядами смонтированные на раме, и мезсанизм шпуль и уста ковки полных паковок на паковкодержагеле, включающий каретку, смонтированную с возможностью перемещения вдоль ряда паковкодержателей и имеющую лОгок для шпуль, держатель полной паков.ки н съемник шпуль с держателей Ci 3
Недостатком известного шпулярника является низкая производительность, обусловлеиная необходимостью высотной ориентайии механизмов каретки при съеме шпуль с паковкодержателей раз ичных высотных ярубов, а также необходимостью сообщения специального движения каждому из механизмов каретки, отличного от направления движения самой каретки, что приводит к значительному времени операции замены пустой шпули на полную паковку.
Цель изобретения - повышение произ. вадительности и упрощение обслуживания,
Посгавленная цель достигается тем, что в автоматизироваН9(Я)4 шпулярнике для сновальных машин, содержащем горизонтальные паковкодержатели, рядами смонтированные на раме, и механизм съема шпуль и установки полных пакоЁок на паковкодержатели, включавлЬий каретку смонтированную с возможностью перемешения вдоль ряда паковкодержателей и имеющую лоток для шпуль, держатель полной паковки и съемник шпуль с дер жатвлей, механизм съема шпуль и уСта новки полнызс паковок дополнительно имее каретки по числу рядов паковкодержагелей и толкатели, смонтированные на каретках, а паковкодержатели смонтированы ,с возможностью поворота относительно вертикальной оси и взаимодействия с толкателями, при этом съемник шпуль
вьтопнен в виде копира, смонтированного на верхней плоскости каретки с возможностью взаимодействия с торшмл шпули при повороте паковкодержателя, держа
тель полкой паковки смонтирован вд{м1Ь каретки, а паковкодержатели установлены с возможностью ориентирования вдоль оси держателя полной паковки соответствующей каретки,
того, паковкодержатели имеют подпружиненйые рычаги дЛя взаимодействия с толкателями,
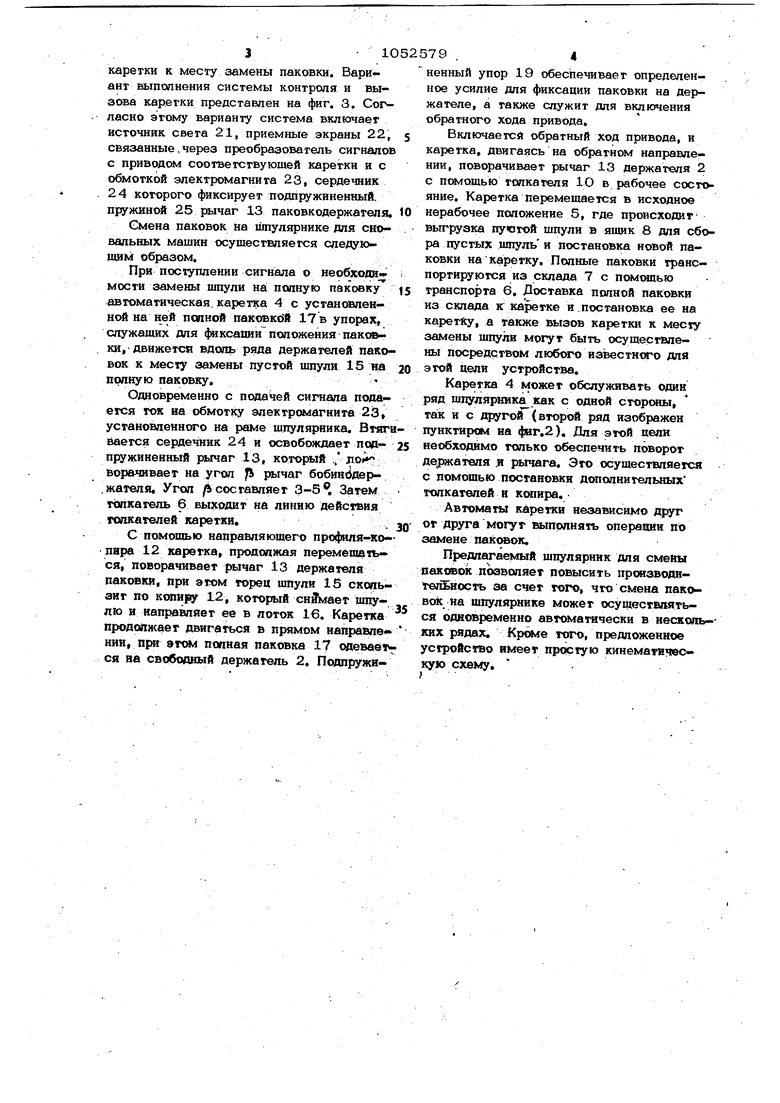
На $иг, 1 изображен щпулярник с расположением кареток в исходном положеНИИ, общий вид; на фиг, 2 - каретка в рабочем положении, вид сверху; на фиг.Зсистема кситроля и вызова каретки, вар|шнт, . Шпулярник состоит из рамы 1 с нескотькими рядами паковкодержателей 2, на которых установлены паковки 3, и кареток 4, которое в нерабочем положении занимают позицию 5, а также устройства 6 для транспортировки паковок из склада . Яшик 8 служит для сбора пустых шпуль.
Каждый ряд держателей обслуживает одна каретка 4, передвигающаяся по направляющим 9 вдоль шаулярнйка.
На каретке установлены толкатели 10 и 11, смонтированные с возможностью взаимодействия с рычагами 13 и 14 паковкодержателей 2 для поворота последних при движении каретки 4. Направлякяций кшир 12 смонтирован на верхней плоскости каретки с возможностью взаимодействия с торцом шпули 15 при повороте паковкодержателя относительно вертикальной оси;
В основании каретки выполнен лоток 16 Ш1Я размещения пустой шпули 15. Полная паковка 17 для замены транспортируется в упорах 18 и подпружиненном упоре 19. Для передвижения каретки
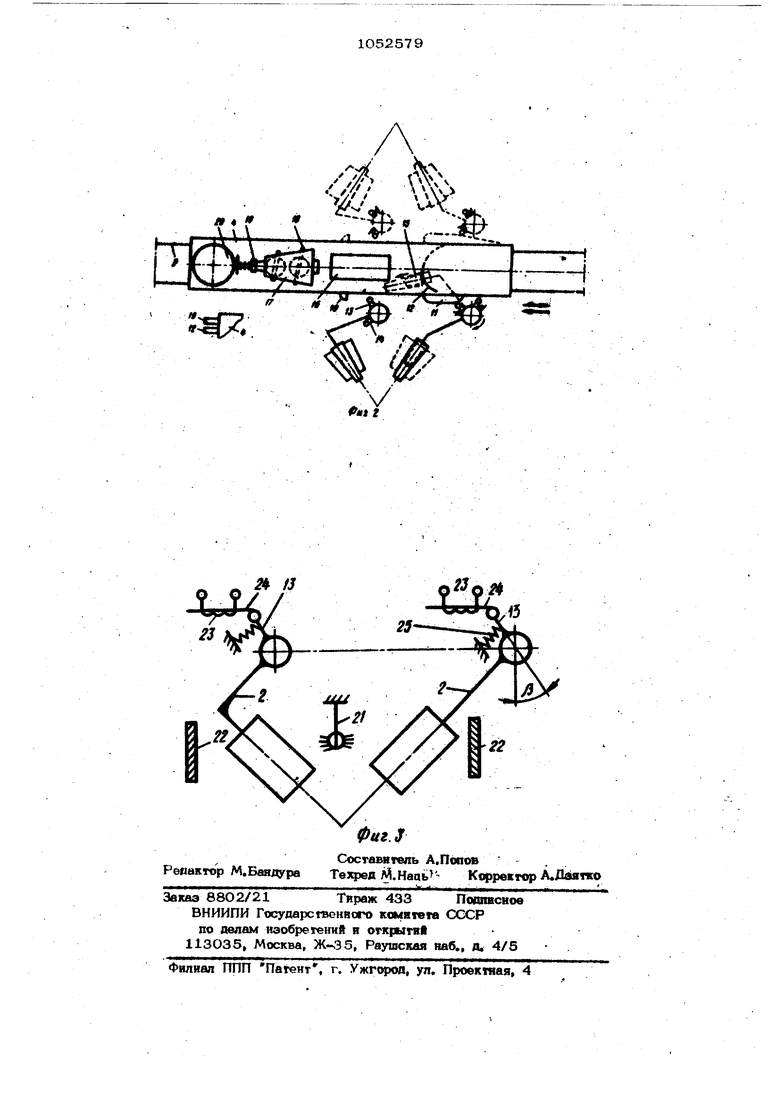
«спользуется электрический привод 2 О. Кроме того, шпудярник снабжен системой контроля за процессом смагывая на кажд1Ы рабочем, месте и вызова каретки к месту замены паковки. Вариант выполнения системы контроля и вызова карегки представлен на фиг. 3, Согласно этому варианту система включает источник света 21, приемные экраны 22, связанные, через преобразователь сигналов с приводом соответствующей каретки и с обмоткой электромагнита 23, сердечник 24 которого фиксирует подпружиненный, пружиной 25 рычаг 13 паковкодержателя. Смена паковок на шпулярнике для сновальных машин осуществляется следующим образом. При поступлении сигнала о необходи мости замены щпули на потную паковку автоматическая, каретка 4 с установленной на ней пшной паковкоИ 17 в упорах, служащих для фиксации положения паковки, движется вдсщ ряда держателей пакоБОК К Meciy замены пустой шпули 15 на полную паковку. Одновременно с подачей сигнала подается ГОК на обмотку электромагнита 23, установленного на раме шпулярника. Втяг вается сердечник 24 и освобождает подпружиненный рычаг 13, который ., ворачивает на угол Jb рычаг бобинбдер.жателя. Угол составляет 3-5Ч Затем толкатель 6 выходит на линию действия толкателей каретки. С помощью направляющего профиля-Ко пара 12 каретка, продолжая перемешеп - ся, поворачивает рычаг 13 держателя паковки, при этом торец шпули 15 скшьаит по копиру 12, который cH viaeT шпулю и направляет ее в лоток 16. Каретка продоПжает двигаться в прямом направле НИИ, при этом полная паковка 17 OAeBaei ся на свободный держатель 2. Подпружнненный упор 19 обеспечивает определенное усилие для фиксации паковки на держателе, а также служит для включения обратного хода привода. Включается обратный ход привода, и каретка, двигаясь на обратном направлении, поворачивает рычаг 13 держателя 2 с пгалощью толкателя 10 в рабочее состояние. Каретка перемешается в исходное нерабочее положение 5, где происходит выгрузка пустой шпули в яшик 8 для сбора пустых шпульи постановка новой паковки на каретку. Полные паковки транспортируются из склада 7 с пом(ипью транспорта 6, Доставка полной паковки из склада к каретке и.постановка ее на каретку, а также вызов каретки к месту замены шпули Могут быть осуществлены посредством любот-о известнсго для этой цели устройства. Каретка 4 может обслуживать один ряд шпуляркнка как с одной стороны, так и с /фугой (второй ряд изображен пунктиром на фиг.2). Для этой цели Необходимо только обеспечить поворот делателя .я рычага. Это осуществляется с помошью постановки дополнительных толкателей и копира.Автомапл KetpeTKH независимо друг от друга могут выполнять операции по замене naK ffioK. Предлагаемый щпулярннк для cMeHid паксбврк позволяет повысить производитепЁность за счет того, что смена паковоК на шпулярнике может осуществляться одновременно автоматически в нескопь-кнх рядах. Кроме того, предложенное устройство имеет простую кинематическую схему .
N
1 У
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
