Изобретение относится к строительно-монтажным работам, в частности к конструкциям устройств, используемых при подъеме вертикальных аппаратов двумя стреловыми кранами.
Цель изобретения - повышение удобства в эксплуатации.
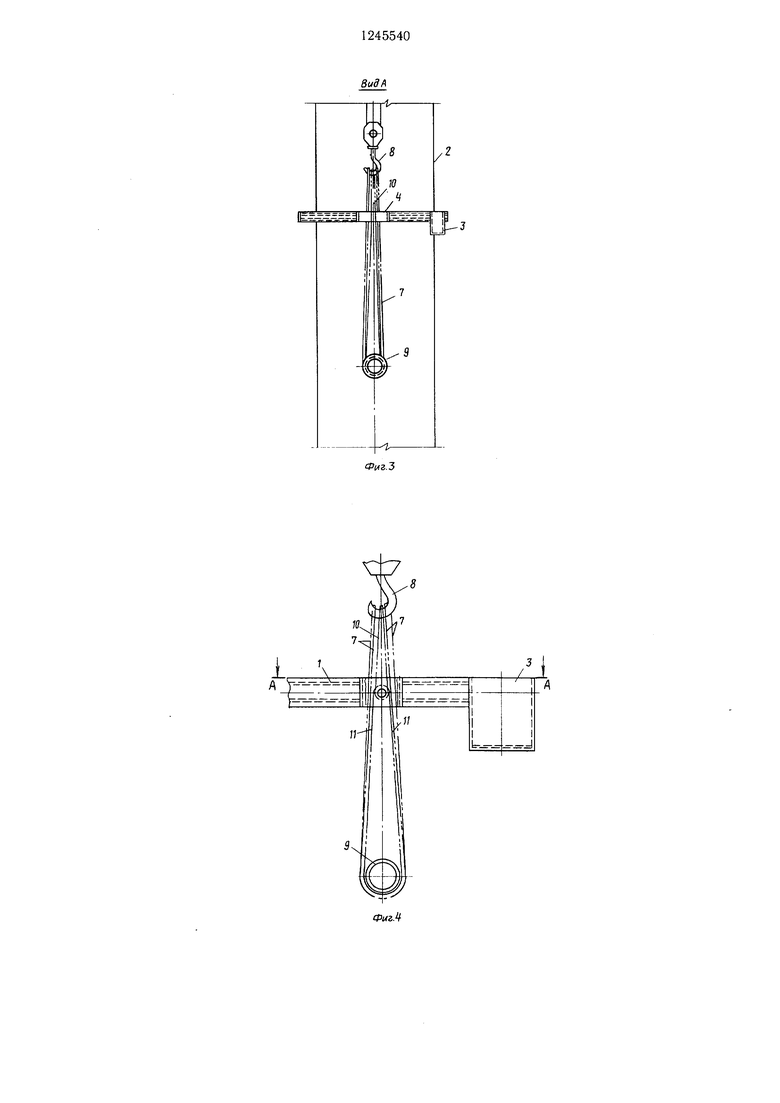
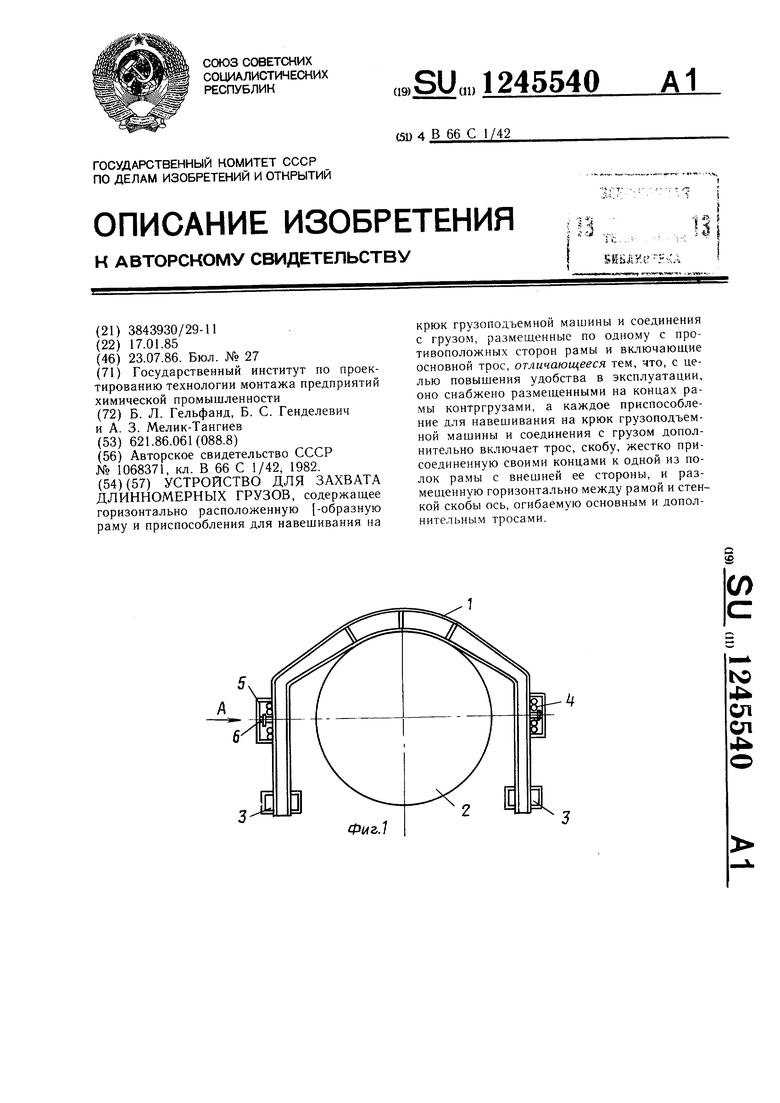
На фиг. 1 показано устройство, вид сверху; на фиг. 2 - то же, общий вид; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - схема крепления стропов; на фиг. 5 - уст- ройство в процессе работы.
Устройство для захвата длинномерных грузов состоит из -образной рамы 1, боковые участки которой выполнены параллельными, а центральный участок - криволинейной формы, причем средняя часть его выполнена по радиусу, соответствующему радиусу поднимаемого аппарата 2. На концах рамы 1 установлены контргрузы 3, позволяющие удерживать устройство в горизонтальном положении в процессе подъема груза.
На параллельных прямых участках рамы 1 соосно закреплены приспособления 4 для навещивания на крюк грузоподъемной машины и соединения с грузом, каждое из которых включает в себя скобу 5, в средней части которой установлена ось 6, один конец которой прикреплен к раме 1, а другой - к скобе 5. Через приспособления 4 пропущены грузовые стропы 7, соединяющие крюки 8 кранов с цапфами 9 аппарата 2, а к каждой из осей б закреплены по две гибкие тяги 10 и 11, при этом свободный конец гибкой тяги 10 соединен с крюком крана, а свободный конец гибкой тяги 11 соединен с цапфой 9 аппарата.
Рама 1 устройства может быть выполнена разъемной, состоящей из трех частей: двух прямых участков с контргрузами на концах и криволинейного участка, которые могут быть соединены между собой, например, болтовым соединением.
Устройство работает следующим образом.
Раму 1 с помощью гибких тяг 10 навешивают на крюки 8 грузоподъемной машины и фиксируют в горизонтальном положении за счет контргрузов 3. Затем устанавливают ее над горизонтально расположенным грузом и производят его строповку, пропустив грузовые стропы 7 через приспособления 4 и закрепив на осях 6 последних гибкие тяги 11, свободные концы которых соединяют с цапфами 9 аппарата. Гибкая тяга 11 предотвращает продольное смещение устройства. Затем производят подъем и установку аппарата в проектное положение, причем при выводе аппарата из исходного горизонтального в вертикальное положение, устройство, перемещаясь по вертикали, сохраняет свое горизонтальное положение на протяжении всего подъема.
Фмг.2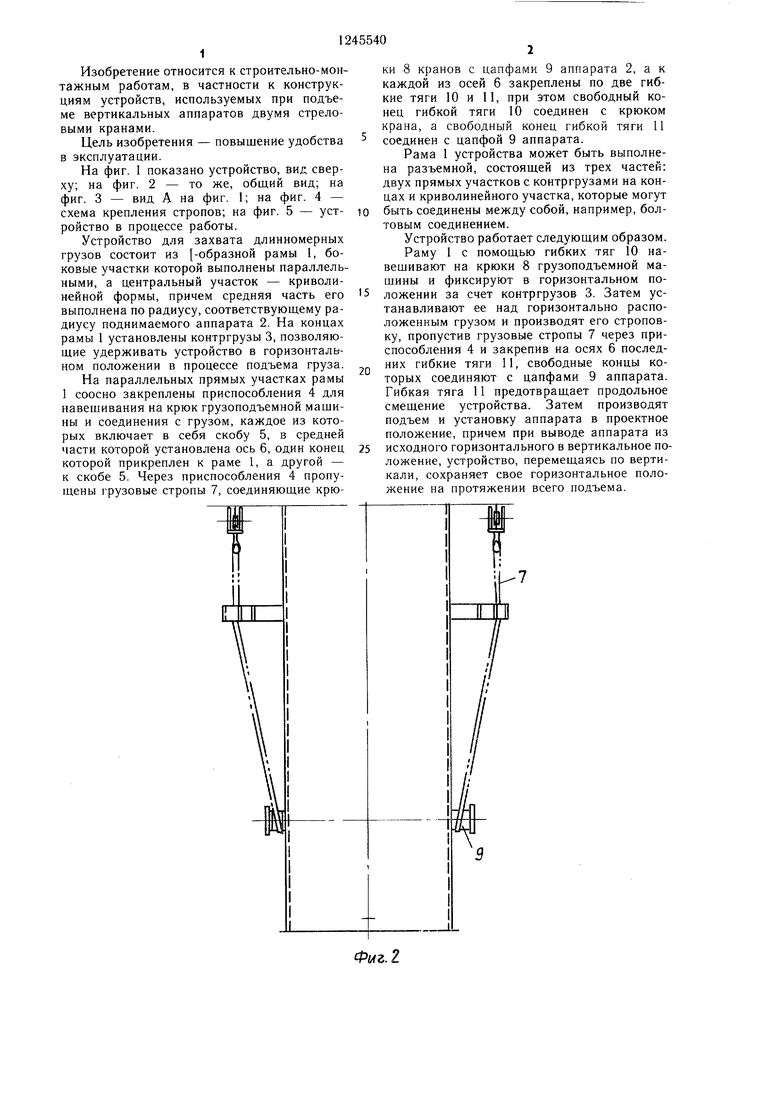
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Устройство для подъема,перемещения и передачи тяжеловесных грузов между причальной стенкой и акваторией | 1982 |
|
SU1058873A1 |
| ГРУЗОВАЯ ПОДВЕСКА ОБОРУДОВАНИЯ | 2012 |
|
RU2502664C1 |
| Захватное устройство для изделий с отверстием | 1984 |
|
SU1162730A1 |
| Консольная грузоподъемная траверса | 1988 |
|
SU1652278A1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| Захватное устройство | 1988 |
|
SU1588684A1 |
| Грузозахватная балансирная траверса В.П.Зайцева и ее варианты | 1980 |
|
SU984975A1 |
| Способ передачи груза под пролетным строением и грузовая подвеска для осуществления способа | 1977 |
|
SU768744A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ ПО ЛЕСТНИЧНЫМ ПРОЛЕТАМ | 2008 |
|
RU2380307C1 |

/// ////////////////// //77///////: ///////////////
Фиг.д
| Авторское свидетельство СССР № 1068371, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
