(Л
С
I lfc fcWws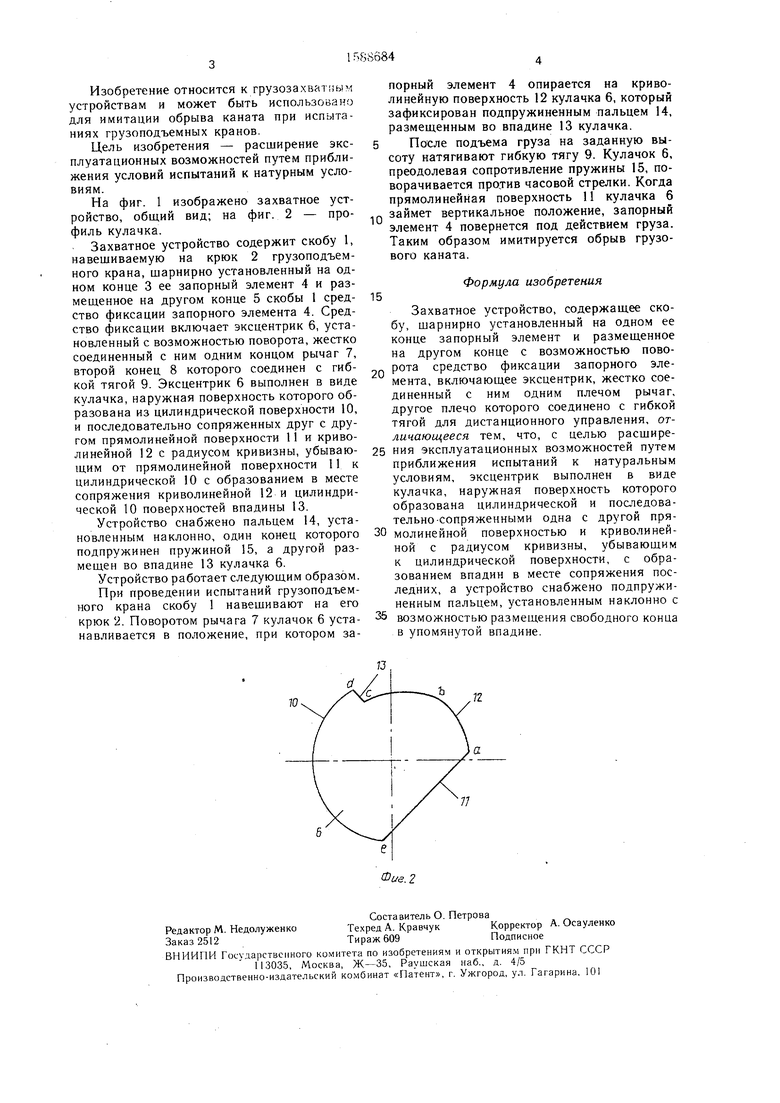
| название | год | авторы | номер документа |
|---|---|---|---|
| Съемная грузовая скоба для навешивания на крюк грузоподъемного механизма | 1986 |
|
SU1421663A1 |
| Устройство для предотвращения падения грузов при обрыве каната в полиспастных подвесах | 1980 |
|
SU922046A1 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| ОГРАНИЧИТЕЛЬ ВЫСОТЫ ПОДЪЕМА ЗАХВАТНОГО ОРГАНА ГРУЗОПОДЪЕМНОГО КРАНА | 1969 |
|
SU251180A1 |
| Грузозахватное устройство | 1987 |
|
SU1532508A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЛОПАСТИ | 2020 |
|
RU2742357C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2614873C1 |
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
Изобретение относится к грузозахватным устройствам и может быть использовано для имитации обрыва каната при испытаниях грузоподъемных кранов. Цель изобретения - расширение эксплуатационных возможностей путем приближения условий испытаний к натурным условиям. В грузозахватном устройстве средство фиксации запорного элемента выполнено в виде кулачка 6, наружная поверхность которого образована цилиндрической поверхностью, прямолинейной поверхностью 11 и сопряженной с последней криволинейной поверхностью 12 с радиусом кривизны, убывающим в сторону цилиндрической поверхности, с образованием между ними впадины, в которой расположен подпружиненный палец 14. В закрытом состоянии запорный элемент 4 взаимодействует с кулачком 6 по его криволинейной поверхности 12. Для имитации обрыва грузового каната необходимо с помощью рычага 7 повернуть кулачок 6 таким образом, что прямолинейная его поверхность занимает вертикальное положение. 2 ил.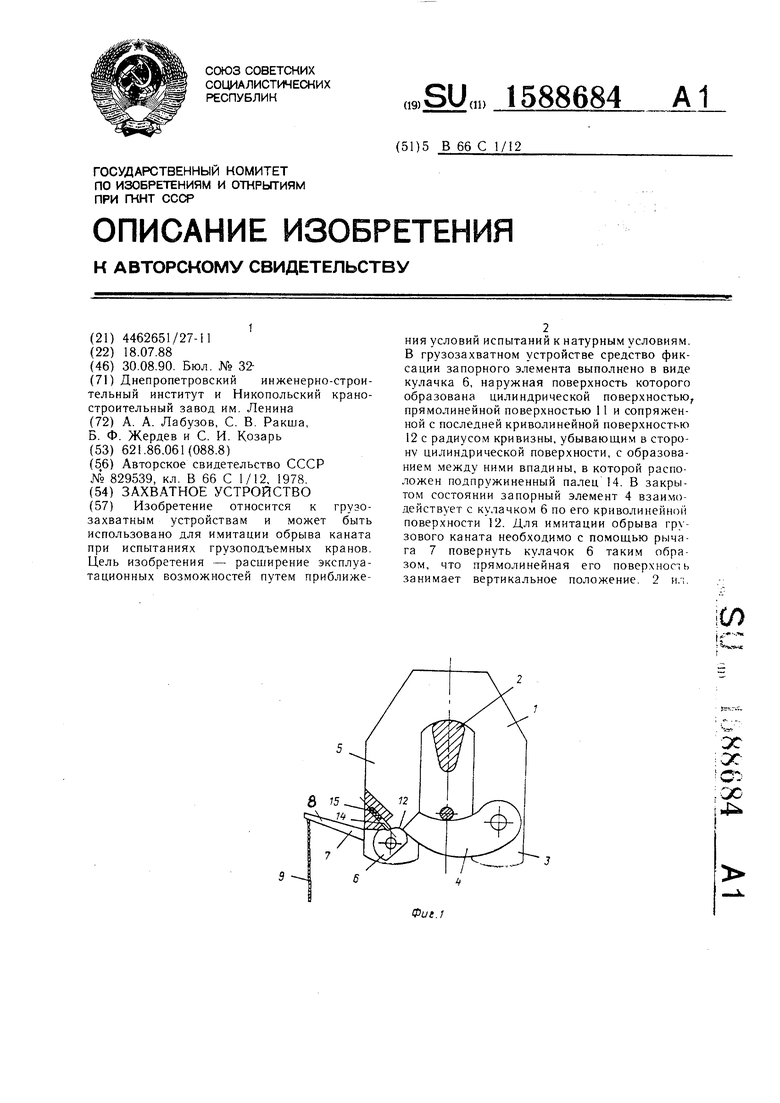
Чтэг а
:00 4
Изобретение относится к грузозахват1 ым устройствам и может быть использовано для имитации обрыва каната при испытаниях грузоподъемных кранов.
Цель изобретения - расширение эксплуатационных возможностей путем приближения условий испытаний к натурным условиям.
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 - профиль кулачка.
Захватное устройство содержит скобу 1, навешиваемую на крюк 2 грузоподъемного крана, шарнирно установленный на одном конце 3 ее запорный элемент 4 и размещенное на другом конце 5 скобы 1 средство фиксации запорного элемента 4. Средство фиксации включает эксцентрик 6, установленный с возможностью поворота, жестко соединенный с ним одним концом рычаг 7, второй конец 8 которого соединен с гибкой тягой 9. Эксцентрик 6 выполнен в виде кулачка, наружная поверхность которого образована из цилиндрической поверхности 10, и последовательно сопряженных друг с другом прямолинейной поверхности 11 и криволинейной 12 с радиусом кривизны, убывающим от прямолинейной поверхности 11 к цилиндрической 10 с образованием в месте сопряжения криволинейной 12 и цилиндрической 10 поверхностей впадины 13.
Устройство снабжено пальцем 14, установленным наклонно, один конец которого подпружинен пружиной 15, а другой размещен во впадине 13 кулачка 6.
Устройство работает следующим образом. При проведении испытаний грузоподъемного крана скобу 1 навешивают на его крюк 2. Поворотом рычага 7 кулачок 6 устанавливается в положение, при котором за70
порный элемент 4 опирается на криволинейную поверхность 12 кулачка 6, который зафиксирован подпружиненным пальцем 14, размещенным во впадине 13 кулачка.
После подъема груза на заданную высоту натягивают гибкую тягу 9. Кулачок 6, преодолевая сопротивление пружины 15, поворачивается против часовой стрелки. Когда прямолинейная поверхность 11 кулачка 6
займет вертикальное положение, запорный элемент 4 повернется под действием груза. Таким образом имитируется обрыв грузового каната.
Формула изобретения
Захватное устройство, содержащее скобу, щарнирно установленный на одном ее конце запорный элемент и размещенное на другом конце с возможностью поворота средство фиксации запорного эле- мента, включающее эксцентрик, жестко соединенный с ним одним плечом рычаг, другое плечо которого соединено с гибкой тягой для дистанционного управления, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем приближения испытаний к натуральным условиям, эксцентрик выполнен в виде кулачка, наружная поверхность которого образована цилиндрической и последовательно-сопряженными одна с другой прямолинейной поверхностью и криволинейной с радиусом кривизны, убывающим к цилиндрической поверхности, с образованием впадин в месте сопряжения последних, а устройство снабжено подпружиненным пальцем, установленным наклонно с
возможностью размещения свободного конца в упомянутой впадине.
