Изобретение относится к обработке материалов резанием, а именно к устройствам для закрепления деталей, снабженных приспособлениями для сбора и удаления стружки.
Цель изобретения - автоматизация уборки стружки путем удаления ее со .станка с использованием промышленного робота.
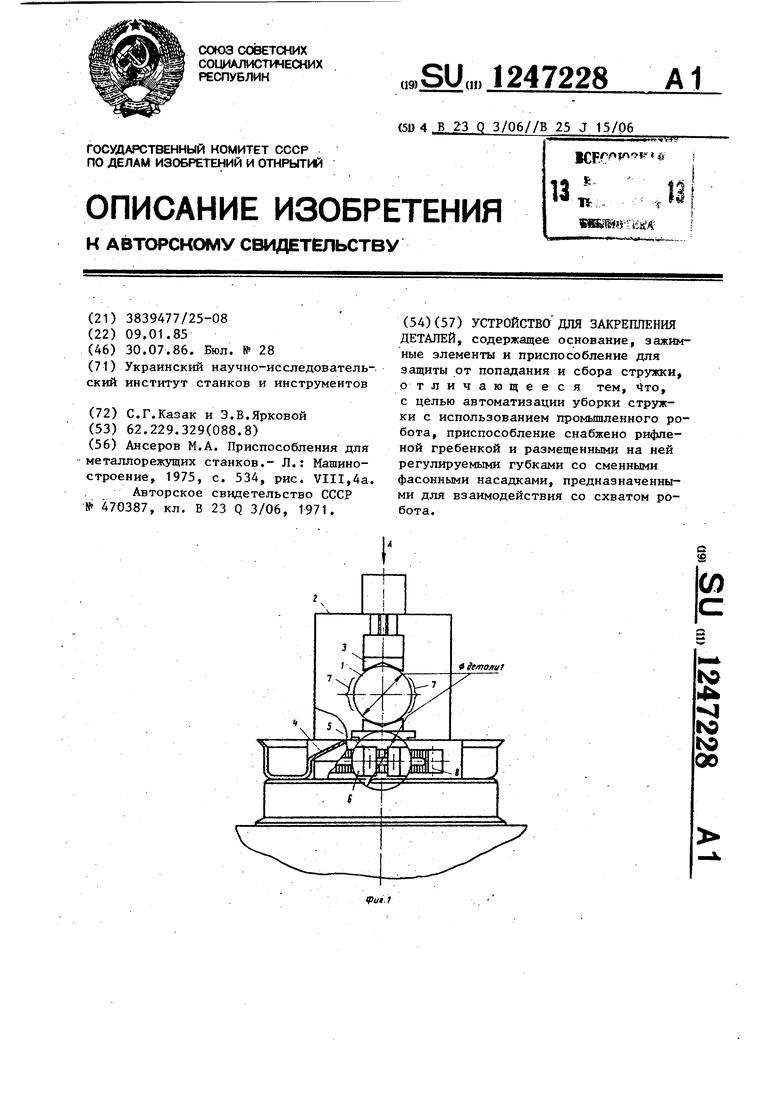
На фиг. 1 изображено устройство, общий вид, на фиг.2- вид А на фиг.1
Устройство для закрепления деталей 1 для роботизированного металлорежущего станка (не показан) содержит основание 2, зажимные элементы 3 и смонтированное на нем приспособление для защиты от попадания и сбора стружки, выполненное в виде быстро- съемного поддона 4, охватывающего основание 2 и зажимные элементы 3.
На поддоне 4 смонтированы регулируемые губки 5 со сменными фасонными насадками 6. Деталь 1 имеет, например, цилиндрическую форму. Участки 7 детали 1 взаимодействуют со схва- том робота (не показан) в процессе автоматической смены детали 1. Форма насадок идентична форме участков 7 детали 1, взаимодействующих с роботом. Насадки 6 имеют форму цилин- дрических поверхностей с диаметром, равным диаметру детали 1. Размер между насадками 6 равен размеру между участками 7 детали 1, взаимодействующими с роботом. Насадки 6 раз- мещены на рифпенной гребенке 8, которая закреплена на поддоне 4.
Устройство работает следующим образом.
5 0
0 5
5
Схват робота, взаимодействуя с участками 7 детали 1, зажимает деталь 1 и транспортирует ее, помещая в зажимные элементы 3 устройства. Зажимными элементами 3 деталь 1 зажимается, после чего схват робота освобождает деталь 1 и перемещается за пределы рабочей зоны станка.
В процессе обработки детали 1 образОБавщаяся стружка попадает в быстросъемный поддон 4.
После окончания обработки деталь 1 транспортируется из рабочей зоны станка. На ее место устанавливается очередная деталь 1. После расчетного числа циклов обработки деталей 1 робот своим схватом захватывает насадки 6 губок 5 быстросъемного поддона 4, который надежно удерживается в схвате вследствие того, что форма насадок 6 поддона 4 выполнена идентичной форме участков 7 детали 1, взаимодействующих со схватом робота, а расстояние между насадками соответствует размеру между этими участками.
Далее роботом поддон 4 вынимается из устройства, транспортируется в зону сброса стружки и поворотом схвата с поддоном 4 вокруг горизонтальной оси руки робота, стружка сбрасывается с поддона 4. Затем поддон 4 внрэь устанавливается роботом на свое место в устройство.
При изменении типа обрабатываемых деталей 1 на устройстве параллельно с заменой зажимных элементов 3 производится замена насадок 6 и установка их на требуемый размер.
В ид А
иг, 2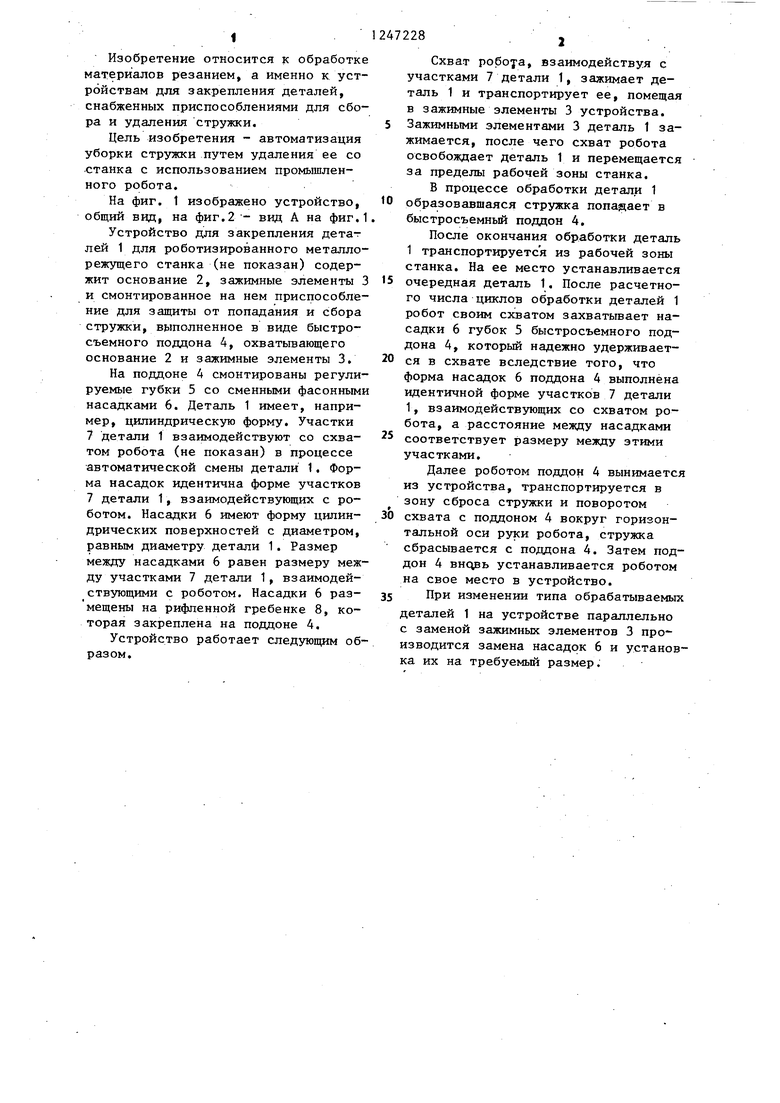
| название | год | авторы | номер документа |
|---|---|---|---|
| Робото-технологический комплекс | 1985 |
|
SU1328189A1 |
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| Робототехнологический комплекс | 1987 |
|
SU1509227A1 |
| Станочное приспособление | 1986 |
|
SU1768368A1 |
| ЦЕНТРОБЕЖНАЯ ОЧИСТИТЕЛЬНАЯ УСТАНОВКА И СПОСОБ ЭКСПЛУАТАЦИИ ЦЕНТРОБЕЖНОЙ ОЧИСТИТЕЛЬНОЙ УСТАНОВКИ | 2015 |
|
RU2674092C2 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1329948A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| Ансеров М.А | |||
| Приспособления для металлорежущих станков.- Л.: Машиностроение, 1975, с | |||
| Ножной переключатель для перемены направления вращения электродвигателя | 1921 |
|
SU534A1 |
| VIII,4а | |||
| Станочные тиски | 1971 |
|
SU470387A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
