Изобретение относится к машиностроению, в частности к станкостроению, и может найти применение в гибких производственных системах для обработки металлов резанием.
Цель изобретения - повышение надежности за счет уменьшения металлоемкости подвижных элементов.
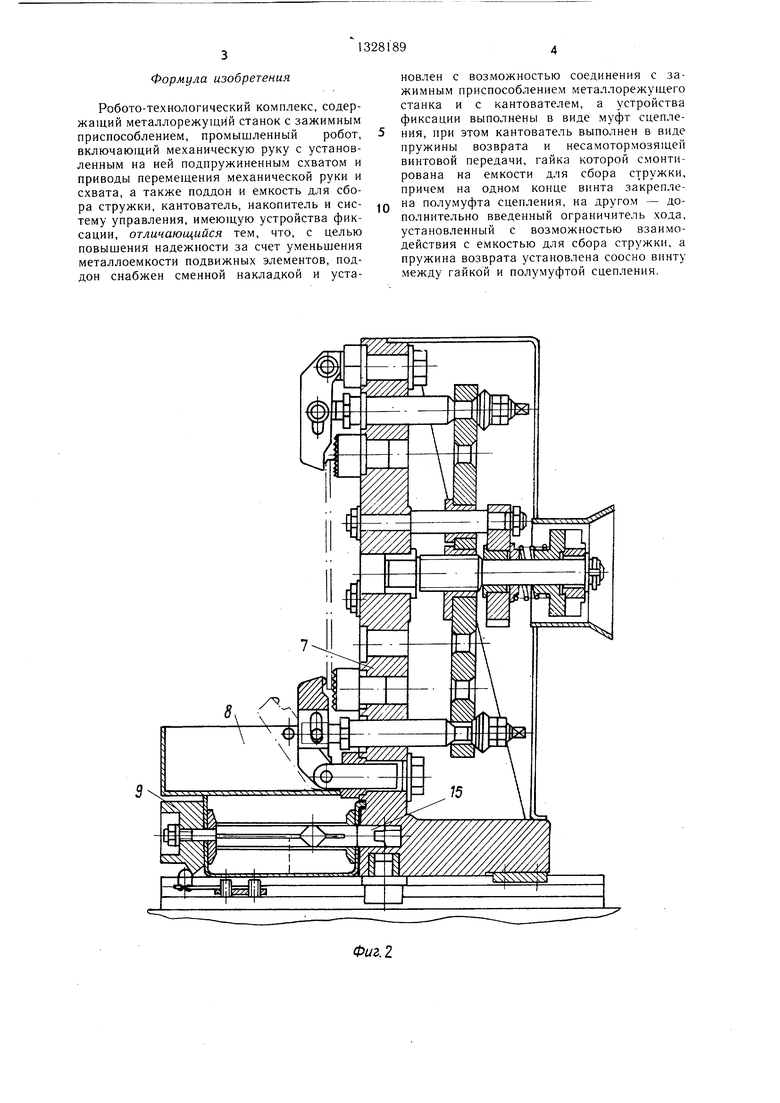
На фиг. 1 изображен робото-техноло- гический комплекс (РТК); на фиг. 2 - зажимное приспособление металлорежущего станка, входящего в состав РТК, вид сбоку; на фиг. 3 - механическая рубка со схватом; на фиг. 4 - то же, со схватом и поддоном; на фиг. 5 - поддон, состыкованный с кантователем.
РТК (фиг. 1) состоит из промышленного робота 1, включающего механическую руку 2 и схват 3 кантователя 4, емкости 5 для сбора стружки, и металлорежущего станка 6.
Металлорежущий станок 6 оснащен зажимным приспособлением 7 для крепления заготовки, выполненным с поддоном 8 для сбора стружки, на Котором закреплена сменная накладка 9. Кантователь 4 выполнен в виде несамотормозящейся винтовой пары, состоящей из винта 10, на одном конце которого смонтирована полумуфта 11 сцепления, а на другом конце - ограничитель 12 хода винта 10, гайки 13, жестко установленной на корпусе емкости 5 для сбора стружки, и пружины возврата 14, установленной соосно винту 10 между гайкой 13 и полумуфтой 11 сцепления. Кантователь 4 установлен на корпусе емкости 5 для сбора стружки (фиг. 1).
Поддон (фиг. 2) для сбора стружки оснащен средством соединения с кантователем 4, выполненным в виде зубчатой полумуфты 15, промышленный робот 1 оснащен сцепной муфтой 16 (фиг. 3), сое- диняю цей механическую руку 2 промышленного робота 1 со схватом 3. Обе полумуфты сцепной муфты 16 укреплены неподвижно, одна на механической руке 2, другая на схвате 3.
Схват 3 подпружинен упругим элементом 17 и установлен на механической ру- « ке 2 робота с возможностью осевого перемещения. В исходном положении упругим элементом 17 сцепная муфта 16 включена и схват 3 соединен с механической рукой 2.
РТК работает следующим образом.
В процессе обработки заготовки (не показана), установленной в зажимное приспособление 7 металлорежущего станка 6, стружка попадает в поддон 8 (фиг. 1) для сбора стружки, закрепленный на зажимном приспособлении 7 металлоружего станка 6. После окончания обработки и выноса заготовки схватом 3 промышленного робота 1 из рабочей зоны металлорежущего станка робот 1 движением механической руки 2 совмещает ось механической руки 2 с осью зубчатой полумуфты 15 (фиг. 4) поддона 8 и захватывает схватом 3 поддон 8 за сменную накладку 9. Затем втягиванием меха- 5 нической руки 2 промыщленный робот 1 выносит поддон 8 из рабочей зоны металлорежущего станка 6, Далее поддон 8 со стружкой в нем переносится к емкости 5 для сбора стружки и останавливается в позиции, когда ось механической руки 2 совпадает с осью кантователя 4. Выдвижением механической руки 2 в сторону кантователя промышленный робот I стыкуется с кантователем 4, автоматически соединяя зубчатую полумуфту 15 (фиг. 2) поддона 8 с
5 зубчатой полумуфтой 11 (фиг. 5) кантователя 4.
Механическая рука 2 промышленного робота 1 со схватом 3, поддон 8 и кантователь 4 занимают соответствующее положение (фиг. 3-5).
0 Дальнейщим выдвижением механической руки 2 по оси кантователя промышленный робот 1 вызывает деформацию упругого элемента 17 (фиг. 3). В процессе деформации сцепная муфта 16 выключается,
5 так как винт 10 (фиг. 5) кантователя 4 остается неподвижным, поскольку пружина 14 возврата собрана с натягом, превышающим рабочее усилие на упругом элементе 17.
После выключения сцепной муфты 16 и
0 упора схвата 3 своим торцом 18 в подпятник 19 механическая рука 2, продолжая свое осевое движение, начинает через подпятник 19 перемещать схват 3 с поддоном 8 и винтом 10. Осевое перемещение несамотормозящегося винта 10 пре5 образуется неподвижно установленной гайкой 13 во вращение винта 10. Пружина 14 возврата при этом деформируется. Вращение винта 10 через собранные зубчатые полумуфты 15 и 11 соответственно поддона 8 и винта 10 передается на под дон 8. При вращении последний очищается от стружки, которая под действием сил тяжести попадает в емкость 5 для сбора стружки. После очистки поддона 8 промышленный робот 1 перемещает механическую
5 руку со схватом 3 и поддоном 8 в обратном направлении. Пружина 14 возврата перемещает винт 10, не давая зубчатым полумуфтам 15 и 11 рассоединиться. После упора фиксатора 12 в гайку 13 винт 10 и схват 3 с поддоном 8 воз0 вращаются в исходное положение, а сцепная муфта 16 начинает включаться под действием ранее сдеформированного упругого элемента 17.
После включения сцепной муфты 16 происходит рассоединение зубчатых полумуфт
5 11 и 15 (фиг. 5). Движением руки 2 промышленный робот устанавливает поддон 8 в зажимное приспособление 7 металлорежущего станка 6 (фиг. 1).
Формула изобретения
Робото-технологический комплекс, содержащий металлорежущий станок с зажимным приспособлением, промыщленный робот, включающий механическую руку с установленным на ней подпружиненным схватом и приводы перемещения механической руки и схвата, а также поддон и емкость для сбора стружки, кантователь, накопитель и систему управления, имеющую устройства фиксации, отличающийся тем, что, с целью повыщения надежности за счет уменьшения металлоемкости подвижных элементов, поддон снабжен сменной накладкой и уста
новлен с возможностью соединения с зажимным приспособлением металлорежущего станка и с кантователем, а устройства фиксации выполнены в виде муфт сцепления, при этом кантователь выполнен в виде пружины возврата и несамотормозящей винтовой передачи, гайка которой смонтирована на емкости для сбора стружки, причем на одном конце винта закреплена полумуфта сцепления, на другом - дополнительно введенный ограничитель хода, установленный с возможностью взаимодействия с емкостью для сбора стружки, а пружина возврата установлена соосно винту между гайкой и полумуфтой сцепления.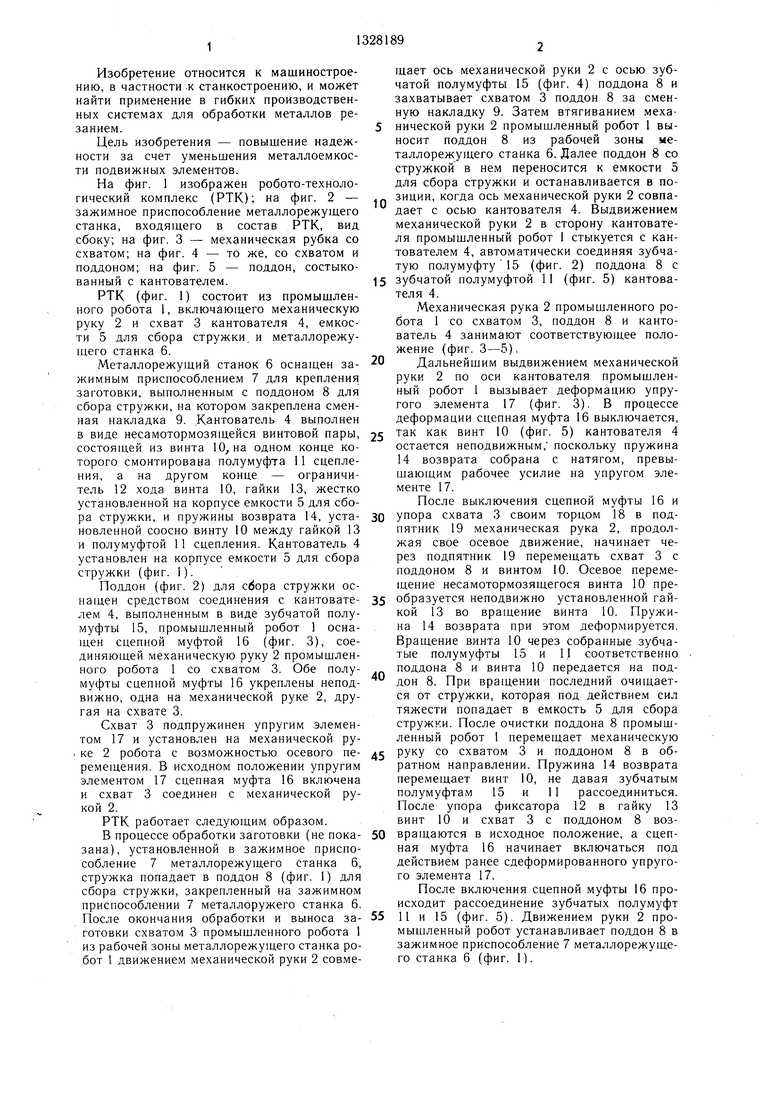
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| Устройство для закрепления деталей | 1985 |
|
SU1247228A1 |
| Управляемая рука промышленного робота | 1981 |
|
SU1087060A3 |
| Станочное приспособление | 1986 |
|
SU1768368A1 |
| Робототехнологический комплекс | 1987 |
|
SU1585120A1 |
| Рука промышленного робота | 1983 |
|
SU1093539A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Робототехнический комплекс | 1986 |
|
SU1458148A1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Промышленный робот | 1986 |
|
SU1509244A1 |
Изобретение относится к области машиностроения и может найти применение в гибких производственных системах для обработки металлов резанием. Целью изобретения является повышение надежности за счет уменьшения металлоемкости подвижных частей. Робото-технологический комплекс содержит промышленный робот 1 с механической рукой 2 и схватом 3, металлорежущий станок 6 с зажимным приспособлением 7, на котором установлен поддон 8 для сбора стружки со сменной накладкой 9. По мере наполнения поддона 8 стружкой схват 3 захватывает поддон 8 за сменную накладку 9, и промышленный робот 1 переносит поддон 8 к емкости 5 для сбора стружки. На емкости 5 для сбора стружки установлен кантователь 4, выполненный в виде винтовой пары, гайка которой закреплена на емкости 5 для сбора стружки, а винт установлен с возможностью поворота и осевого перемещения от привода выдвижения механической руки 2. 5 ил. (Л со to оо и OD СО иг. 1
;j / .72
Составитель А. Ширяева
Редактор М. БланарТехред И. ВересКорректор А. Обручар
Заказ 3436/19Тираж 952Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
