Изобретение относится к машиностроению и может найти применение при обработке металлов резанием.
Цель изобретения - упрощение и повышение надежности комплекса.
Движением вниз схвата 5 робот 4 опускает палету 3 на подпружиненную плиту 10, которая находится в верхнем положении под действием пружин 13, и устанавливает упоры 8 в отверстия 11, размещая
На фиг. 1 изображен робототехнологи- 5 палету 3 на плите 10. ческий комплекс; на фиг. 2 - установ-Дальнейшим движением вниз схват 5 отрывается от палеты 3 и выводится из зоны стола 2 станка 1. Требуемым усилием сверка детали на подпружиненной плите стола станка; на фиг. 3 - сечение А-А на фиг. 1.
Робототехнологический комплекс содер- 10 сацию палеты 3, при этом упоры 8 через жит станок 1 со столом 2 для разме- отверстия 11 подпружиненной плиты 10 щения и фиксации палет 3, загрузочный робот 4 со схватом 5 и накопитель 6. В палете 3 выполнены отверстия 7, в которых установлены упоры 8 для базирова- . ния деталей 9. Стол 2 снабжен подпружиненной плитой 10 с отверстиями 11, установленной параллельно его поверхности с возможностью перемещения в вертикальном направлении.
Упоры 8 размещены с возможностью 20 4 заводит схват 5 под палету 3 с деталью базирования палеты 3 по отверстиям 12, 9. Движением вверх схват 5 подхватывает дополнительно выполненным в столе 2, при этом диаметр упоров 8 меньще диаметра отверстий 11 подпружиненной плиты 10. В исходном положении пружины 13 удерживают плиту 10 в поднятом положении. Па- лета 3 имеет отбуртованные края 14. Схват
25
ху на деталь 9 производят зажим и фикбазируются по отверстиям 12 стола 2.
В процессе обработки детали 9 стружка скапливается в палете 3 с отбуртован- ными краями 14, как в поддоне. После окончания обработки снимают усилие зажима с детали 9, плита 10 под действием пружин 13 перемещается вверх, приподнимая палету 3 со стружкой и деталью. Упоры 8 выходят из отверстий 12. Робот
палету 3, снимая ее с подпружиненного стола, транспортирует ее из зоны станка 1 и устанавливает упорами 8 на накопитель 6.
5 выполнен с базирующими элементами 15 для съема палеты 3 и поддержки ее при транспортировке.
Формула изобретения
Робототехнологический комплекс, содержащий станок со столом для размещения
Комплекс работает следующим образом, зп фиксации палет, в которых выполнены
Детали 9 с технологическими отверстиями устанавливают на установочные упоры 8 палеты 3 накопителя 6. Схват 5 робота 4 подхватывает палету 3 с деталью 9, выводит упоры 8 из координатных отверотверстия под упоры для базирования деталей, загрузочный робот со схватом, накопитель, отличающийся тем, что, с целью упрощения и повышения надежности, стол снабжен подпружиненной плитой с отверстий накопителя 6 и перемещает палету 35 стиями, установленной параллельно его пов зоне стола станка. Палета 3 с деталью 9 надежно сидит на базирующих элементах 15 схвата 5 и не имеет возможности смещаться относительно схвата.
Робот 4 движется в сторону станка 1
и останавливается над подпружиненной пли- выполнены с отбуртованными краями, а той 10 стола 2. Упоры 8 находятся над схват - с базирующими элементами для отверстиями 11 подпружиненной плиты 10. палеты.
верхности, а упоры размещены с возможностью базирования палеты по отверстиям, дополнительно выполненным в столе, при этом диаметр упоров меньще диаметра отверстий упомянутой плиты, причем палеты
Движением вниз схвата 5 робот 4 опускает палету 3 на подпружиненную плиту 10, которая находится в верхнем положении под действием пружин 13, и устанавливает упоры 8 в отверстия 11, размещая
палету 3 на плите 10. Дальнейшим движением вниз схват 5 отсацию палеты 3, при этом упоры 8 через отверстия 11 подпружиненной плиты 10
ху на деталь 9 производят зажим и фиксацию палеты 3, при этом упоры 8 через отверстия 11 подпружиненной плиты 10
4 заводит схват 5 под палету 3 с деталью 9. Движением вверх схват 5 подхватывает
базируются по отверстиям 12 стола 2.
В процессе обработки детали 9 стружка скапливается в палете 3 с отбуртован- ными краями 14, как в поддоне. После окончания обработки снимают усилие зажима с детали 9, плита 10 под действием пружин 13 перемещается вверх, приподнимая палету 3 со стружкой и деталью. Упоры 8 выходят из отверстий 12. Робот
4 заводит схват 5 под палету 3 с деталью 9. Движением вверх схват 5 подхватывает
палету 3, снимая ее с подпружиненного стола, транспортирует ее из зоны станка 1 и устанавливает упорами 8 на накопитель 6.
4 заводит схват 5 под палету 3 с деталью 9. Движением вверх схват 5 подхватывает
Формула изобретения
Робототехнологический комплекс, содержащий станок со столом для размещения
фиксации палет, в которых выполнены
отверстия под упоры для базирования деталей, загрузочный робот со схватом, накопитель, отличающийся тем, что, с целью упрощения и повышения надежности, стол снабжен подпружиненной плитой с отверстиями, установленной параллельно его повыполнены с отбуртованными краями, а схват - с базирующими элементами для палеты.
верхности, а упоры размещены с возможностью базирования палеты по отверстиям, дополнительно выполненным в столе, при этом диаметр упоров меньще диаметра отверстий упомянутой плиты, причем палеты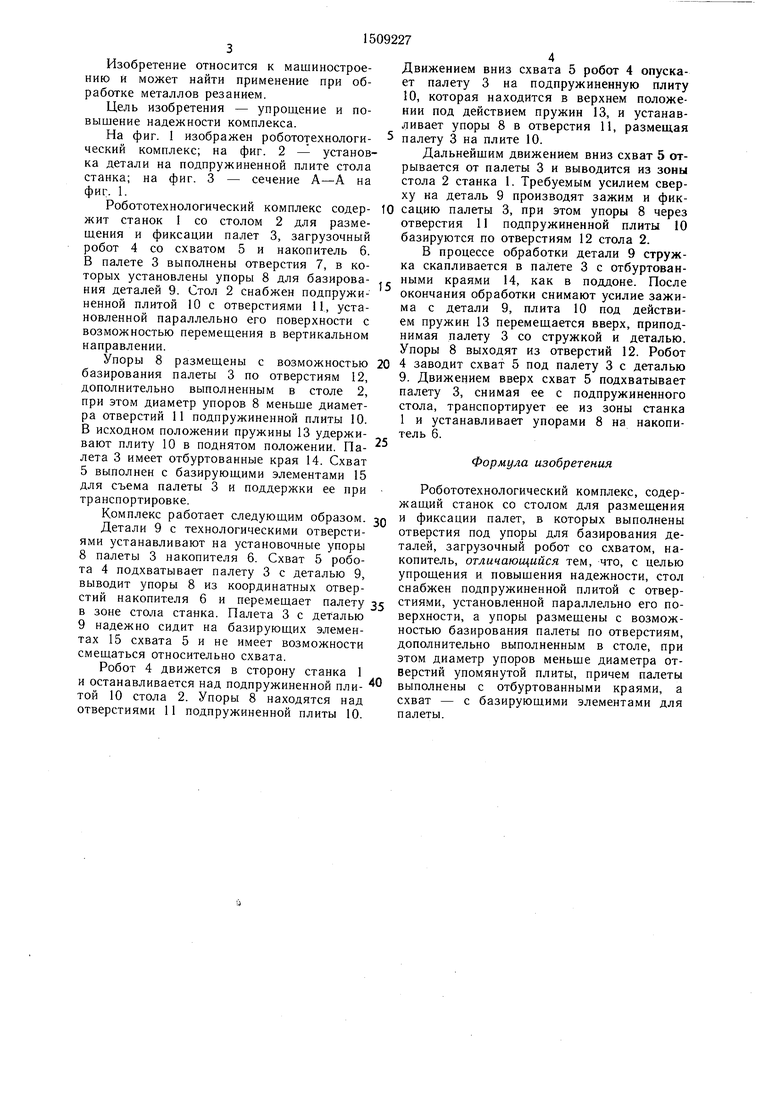
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| Робототехнологический комплекс | 1988 |
|
SU1616802A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ТОРМОЗНЫХ КОЛОДОК С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ИЗНОСА ШЛИФОВАЛЬНОГО КРУГА | 1995 |
|
RU2108220C1 |
| Робототехнологический комплекс | 1987 |
|
SU1585120A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Кассета для деталей | 1986 |
|
SU1400962A1 |
| Гибкий производственный модуль | 1990 |
|
SU1824287A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Загрузочное устройство | 1986 |
|
SU1346394A2 |
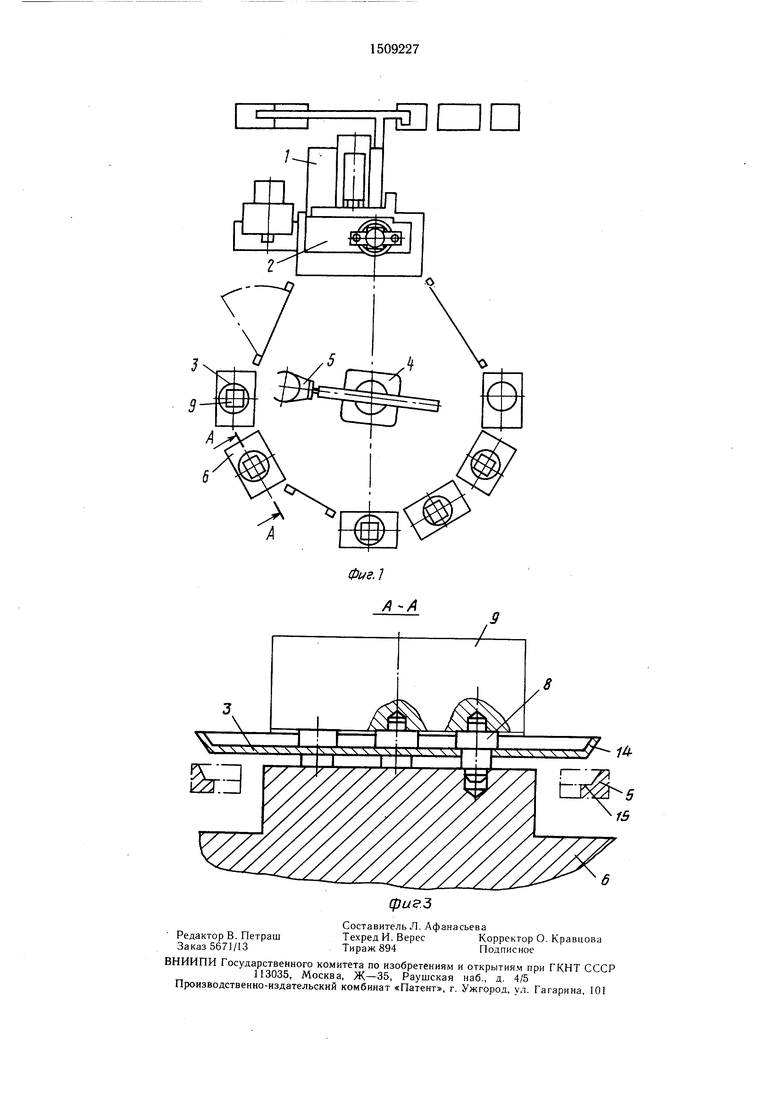
Изобретение относится к машиностроению и может найти применение при обработке металлов резанием. Цель изобретения - упрощение и повышение надежности робототехнологического комплекса. На столе 2 станка установлена подпружиненная плита 10 с отверстиями 11 под упоры 8. Отверстия 12, выполненные в столе 2, служат для базирования палеты 3 посредством упоров 8. Края 14 палеты 3 выполнены отбуртованными. При установке палеты на стол 2 посредством робота сначала упоры 8 находятся над отверстиями 11 подпружиненной плиты 10. Движением вниз схвата робот опускает палету 3 на плиту 10, которая находится в верхнем положении под действием пружин 13. Далее схват робота отводится и усилием сверху на деталь 9 производится зажим и фиксация палеты 3. При этом упоры 8 базируются по отверстиям 12 стола 2. 3 ил.
/4
| Бессольцев А | |||
| М | |||
| и др | |||
| Гибкие производственные системы на базе обрабатывающих центров | |||
| Тяжелые и уникальные станки | |||
| Обзор | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| НИИМАШ, 1984, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
