Изобретение относится к машиностроению и может найти применение при автоматизации технологических процессов и является дополнительным к- основному авт. ев, № 984814. 5
Целью изобретения является расширение технологических возможностей устройства путем обеспечения вьщачи заготовок по обе стороны элеватора на одном уровне.10
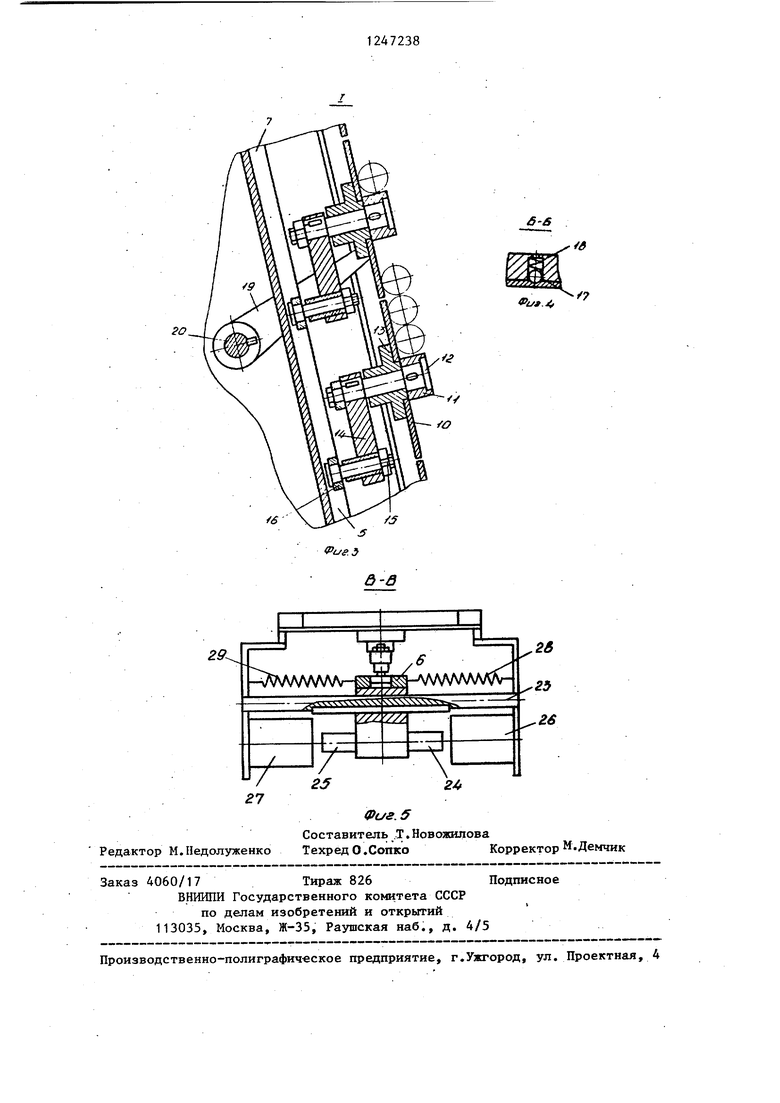
На фиг.1 схематически показано предлагаемое устройство; на фиг.2 - вид А на фиг.1; на фиг.З узел 1 на фиг.1; на фиг.4 - разрез Б-Б на фиг.2; на фиг.З - разрез В-В на фиг.2. 15
Элеваторное загрузочное устройство содержит раму 1, на которой установлен бункер 2, звездочки 3, связанные между собой цепями 4, копиры 5 и 6, выполйенные в виде планок с па- 20 зами 7, лотков вьщачи 8 и 9.
На цепях 4 закреплены пластины 10 с захватами 11, захваты 11 закреплены на оси 12 с возможностью повороЭлеваторное загрузочное устройство работает следующим образом.
Предварительно лотки 8 и 9, по которым заготовки поступают к технологическому оборудованию (не показано), заполняются заготовками, где их наличие контролируется датчиками 21 и 22.
В случае отсутствия необходимого количества заготовок в лотке 8 (9) датчик 21 (22) дает команду на шаговый привод цепей (не показан), который перемещает цепи 4, а следовательно, и пластины 10 с захватами 11 на один шаг. По окончании перемещения дается команда на включение электромагнита 27 (28) и якорь 25 (26) втягивается, при этом копир 6 перемещается в сторону соответствующего электромагнита. При перемещении копира 6 последний воздействует на ролик 16, через рычаг 14 и ось 12 поворачивает захват 11, по которому заготовки соскальзьшают в лоток 8 (9).
та в стакане 13, закрепленном на пла- 25 При поступлении заготовок 8 (9) дат- стине 10. Шарнир 12 соединен с рыча- чик 21 (22) дает команду на отклю- гом 14 с осью 15, на которой уста- чение электромагнита 26 (27) и копир 6 новлен ролик 16, входящий в паз копи- под действием пружины 28 (29) возвраисходное положение. При перов 5 и 6.
В захватах 11 расположены фиксаторы, состоящие из шарика 17 и пружины 18. Сбрасыватель 19 и рычаг с противовесом (не показаны) установлены на оси 20.
В пластинах 10 вьтолнены конусные отверстия под шарики 17 и пазы для (Прохождения сбрасывателя 19.
На лотках 8 и 9 установлены датчики 21 и 22, регистрирующие наличие заготовок в лотках 8 и 9.
Копир 6, установленньй на направ- лякицей 23 с возможностью возвратно- поступательного перемещения в обе стороны, имеет два якоря 24 и 25, входящие в электромагниты 26 и 27, и подпружинен пружинами 28 и 29.
щается в
JJ ремещении копира 6 последний,воздействуя на ролик 16 через рычаг 14 и ось 12, поворачивает захват 11 в исходное положение, где захват 11 фиксируется фиксатором, что обеспечивает горизонтальное положение захватов 11 при движении пластин 10 на холостой ветви цепей 4 и вход ролика 16 в паз копира 5 при перемещении пластин Ю с захватами 11 на рабочую ветвь цепей. В месте расположения сбрасьша35
40
45
теля 19 последний под действием противовеса (не показан) поворачивается и входит в паз пластин 10, что обеспечивает сброс заготовок в бункер 2, а- затем при перемещении пластин 10 задавливаются ими.
о 5
10
12472381
Элеваторное загрузочное устройство работает следующим образом.
Предварительно лотки 8 и 9, по которым заготовки поступают к технологическому оборудованию (не показано), заполняются заготовками, где их наличие контролируется датчиками 21 и 22.
В случае отсутствия необходимого количества заготовок в лотке 8 (9) датчик 21 (22) дает команду на шаговый привод цепей (не показан), который перемещает цепи 4, а следовательно, и пластины 10 с захватами 11 на один шаг. По окончании перемещения дается команда на включение электромагнита 27 (28) и якорь 25 (26) втягивается, при этом копир 6 перемещается в сторону соответствующего электромагнита. При перемещении копира 6 последний воздействует на ролик 16, через рычаг 14 и ось 12 поворачивает захват 11, по которому заготовки соскальзьшают в лоток 8 (9).
исходное положение. При пещается в
ремещении копира 6 последний,воздействуя на ролик 16 через рычаг 14 и ось 12, поворачивает захват 11 в исходное положение, где захват 11 фиксируется фиксатором, что обеспечивает горизонтальное положение захватов 11 при движении пластин 10 на холостой ветви цепей 4 и вход ролика 16 в паз копира 5 при перемещении пластин Ю с захватами 11 на рабочую ветвь цепей. В месте расположения сбрасьша
теля 19 последний под действием противовеса (не показан) поворачивается и входит в паз пластин 10, что обеспечивает сброс заготовок в бункер 2, а- затем при перемещении пластин 10 задавливаются ими.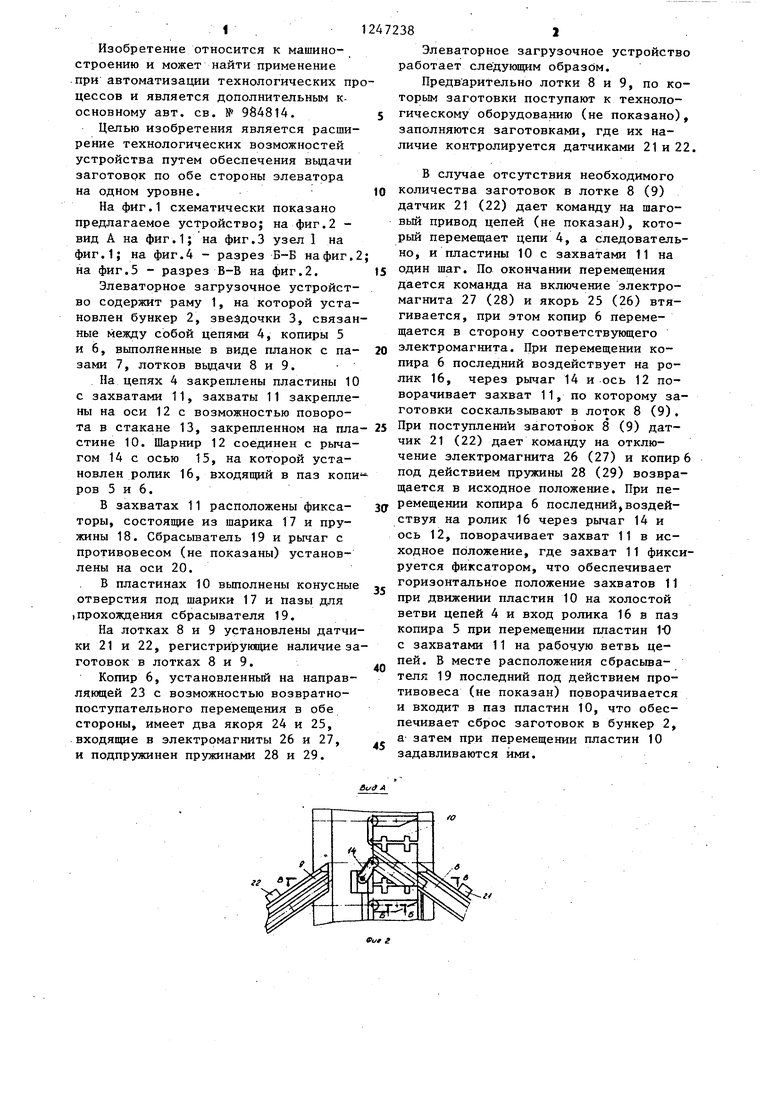
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| Автоматическая линия для изготовления деталей типа скоб | 1982 |
|
SU1134351A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1983 |
|
SU1159849A1 |
| Устройство для выдачи ступенчатых цилиндрических заготовок | 1981 |
|
SU961921A1 |
| Линия протяжки отводов | 1987 |
|
SU1473872A1 |
| Устройство для маркирования | 1989 |
|
SU1725275A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Устройство для ориентированной выдачи заготовок | 1986 |
|
SU1346396A1 |
| Устройство для поштучной выдачи длинномерных заготовок из пакета | 1980 |
|
SU880925A1 |
| Устройство для загрузки деталей | 1991 |
|
SU1802779A3 |

6-s
.
/3
2ff
--s WWWW/
,26
-23 .26
24
Фиа.б
Составитель ,Т.Новожилова Редактор М.Педолуженко Техред О.Сопко Корректор М-Демчик
Заказ 4060/17Тираж 826Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| Элеваторное загрузочное устройство | 1981 |
|
SU984814A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
