.Изобретение относится к технике контроля качества упругих чувстви- тельных элементов и механических манометров .
Цель изобретения - повьшение точности и расширение диапазона измерений .
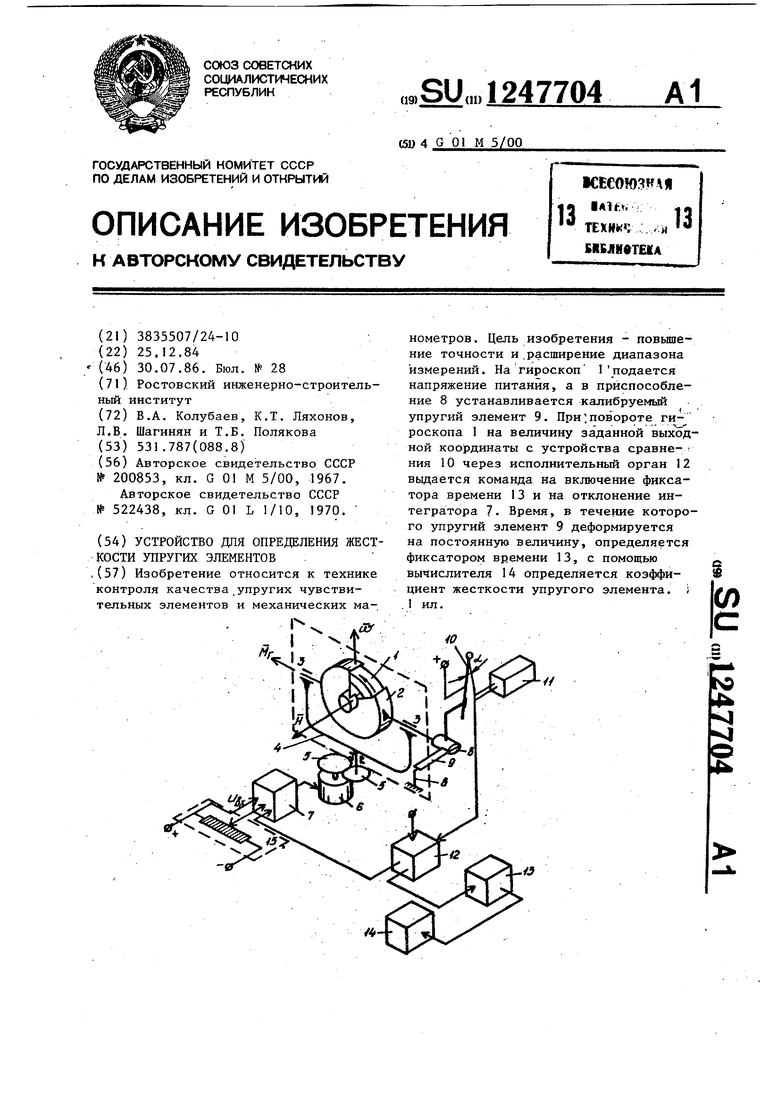
На чертеже представлена принципиальная схема предлагаемого устройства. . .
Основой устройства для измерения коэффициента жесткости упругих элементов является гироскон 1, кото12
рый установлен в кожухе 2, а кожух 2, в свою очередь, с помощью цапф 3 в скобе 4. Ввиду такой установки гироскопу обеспечивается две степени свободы. Первая степень свободы обеспечивается вращением гирос о а 1 вокруг оси собственного вращения, вследствие чего формируется кинетический момент Н , равный произведению момента инерции ротора гироско-i па на угловую скоростью собственного вращения. Вторая степень свободы гироскопу обеспечивается поворотом относительно цапф .3. Скоба 4 через редуктор 5 механически связана С днигатёлем 6, имеющим электрическую связь с интегратором 7. На цапфе 3 гироскопа установлено приспособление 8 для установки испытуемого упругого элемента 9. Приспособление 8 имеет механическую связь с устройством 10
сравнения, которое механически связа- jr ругого элемента.
Принцип работы предлагаемого,устно с задатчиком 11 выходной координаты гироскопа.. Задатчик 11 выходной координаты выполнен в виде микрометрического винта с нониусной шкалой, проградуированной в угловых единицах. 40 Устройство 10 сравнения электрически связано через исполнительный орган 12 с первым входом интегратора 7 и фиксатором 13 времени деформации, выход которого имеет электрическую связь 45 с вычислителем 14 коэффициента жесткости. На второй вход интегратора 7 подается входное напряжение с задатчика 15 входной величины интегратора. Задатчик 15 выполнен в виде потен- JQ циометра и предназначен для задания входного напряжения на входе интегратора 7, зависящего от диапазона измерения.
Устройство работает следующим об- 55 разом.
На гироскоп 1 подается напряжение питания, а в приспособление 8 устаройства обосновьгеается следующими математическими зависимостями.
В установившемся движении упругая сила деформации испытуемого упругого элемента уравновешивается силой гироскопического происхождения, т.е.
K-ol H aJ-sin/a, (1) где К - коэффициент жесткости упругого элемента;
oL координата деформации упругого элемента;
Н - кинетический момент гироскопа;
угловая скорость вынужденного вращения двухстепенного гироскопа вокруг вертикальной оси;
угол между векторами Н HoJ. Дпя углов (что обеспечивается соответствующим выбором параметров ) получают из уравнения (1)
4J -
Э Н 1
(2;
47704-2
навливается калибруемый упругий элемент 9. С помощью задатчика 11 устанавливается строго определенная координата деформации о( , а с помощью
5 задатчика 15 на вход интегратора 7 подается постоянный по амплитуде сигнал Ugy , после чего подается команда на включение устройства. С выхода интегратора 7 сигнал, нарастаю10 щий по линейному закону, поступает на обмотку управления двигателя 6, который приводит во вращательное движение через редуктор 5,скобу 4 с двухстепенным гироскопом 1 с угло- 15 вой скоростью д. Одновременно включается фиксатор .13 времени деформации. Нарастающий, с постоянной скоростью гироскопический момент М в- соответствии с правилом Жуковского
20 поворачивает гироскоп 1 вокруг цапф 3, деформируя упругий калибруемый элемент 9, закрепленный в приспособлении 8. .
При повороте гироскопа Г на велй25 чину заданной выходной координаты с устройства 10 сравнения через исполнительный орган 12 выдается команда на выключение фиксатора 13 времени и на отклонение интегратора 7.
30 Время, в течение которого упругий элемент деформируется на постоянную величину, определяется фиксатором 13 времени, с помощью вычислителя 14 вычисляется коэффициент жесткости упройства обосновьгеается следующими математическими зависимостями.
В установившемся движении упругая сила деформации испытуемого упругого элемента уравновешивается силой гироскопического происхождения, т.е.
K-ol H aJ-sin/a, (1) где К - коэффициент жесткости упругого элемента;
oL координата деформации упругого элемента;
Н - кинетический момент гироскопа;
угловая скорость вынужденного вращения двухстепенного гироскопа вокруг вертикальной оси;
угол между векторами Н HoJ. Дпя углов (что обеспечивается соответствующим выбором параметров ) получают из уравнения (1)
4J -
Э Н 1
(2;
К
Н dt
М dt
Если обеспечить постоянство -углового ускорения вращения скобы 4 гироскопа 1 (в предлагаемом устройстве это реализуется применением интегратора 7 и двигателя 6 с редуктором 5), то из выражения (3) получают
K do(c-d t, где
dbJ
(4)
dt
к- - t к- t.
Проинтегрировав левую и.правую части выражения (4), получают
(5)
При постоянных сны. коэффициент жесткости и упруго го элемента пропорционален времени деформации t. Значения постоянных с и 0 хранятся в памяти вычислителя 14 и используются для вычисления К по информации, полученной от фиксатора 13 времени. Параметры гироскопа, интегратора и двига- |теля. с редуктором рассчитываются по 1известным расчетным формулам.
Применение предлагаемого устройст- 1ва позволяет.увеличить точность измерения коэффициента жесткости упругих элементов в широком диапазоне. Выбирая параметры замкнутой динамической системы известными методами, можно добиться осуществления процесса измерения коэффициента жесткости
Редактор С. Лисина
Составитель А. Соколовский
Техред О.Гортвай КорректЪр С. Шекмар
Заказ 4114/40 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
. Производственно-полиграфическре предприятие, г. Ужгород, ул. Проектная, 4
7704
при малых координатах деформации упругого элемента, чем обеспечивается повышение точности измерения.
Расширение диапазона измерения коэффициента жесткости достигается .путем изменения параметров системы: кинетического .момента гироскопа, коэффициента передачи интегратора, величины входного напряжения интег
10
ратора, а также выбором фиксированного угла деформации.
Формула изобретения
Устройство для определения жесткости упругих элементов, содержащее нагружающий механизм, стабилизатор параметров нагружения, датчик жесткости подключенный к измерителю времени, отличающееся тем, что, с целью повьппения точности и расширения диапазона измерений, в него введен вычислитель коэффициента жесткости, нагружающий механизм выполнен в виде двухстепенного гироскопа с электроприводом, стабилизатор параметров нагружения вьшолнен в виде стабилизатора напряжения питания электропривода, датчик жесткости выполнен в виде реле перемещения упругого элемента, причем измеритель времени соединен с вычислителем коэффициента жесткости и подключен к входу стабилизатора градиента напряжения питания электропривода, причем к этому же входу подключено реле перемещения ./

| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ДВУХСТЕПЕННЫМ РОТОРНЫМ ВИБРАЦИОННЫМ ГИРОСКОПОМ | 2002 |
|
RU2210736C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 1995 |
|
RU2087866C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ЖЕСТКОСТИ УПРУГИХЭЛЕМЕНТОВ | 0 |
|
SU200853A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ контроля жесткости упругих элементов и устройство для осуществления этого способа | 1974 |
|
SU522438A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
