Известные устройства копиров для обработки динамически нагру ке}1ных кулачков с использованием унругих лепт основаны на том, что на конируемом участке расположеп ряд шарнирных (призматических) опор, которые задают положение упругой ленте в расчетных точка.х.
Подобпые копировальнв1е устройства сложны, так как степень нриближепия пол}чаемых KHHCNraTHMecKiix диаграмм к расчетным зависит от количества промежуточных онор и точности их установки.
Описываемое устройство копира, выполпенное в виде упругой ленты, один конец которой укреплен в неподвижном, а второй-в регулируемом в двух направлепиях захвате, устапавливаемом в соответствии с заданным уравнением, упрощает интерполяцию нри построении сложiibix участков, связанных уравнением унругой линии.
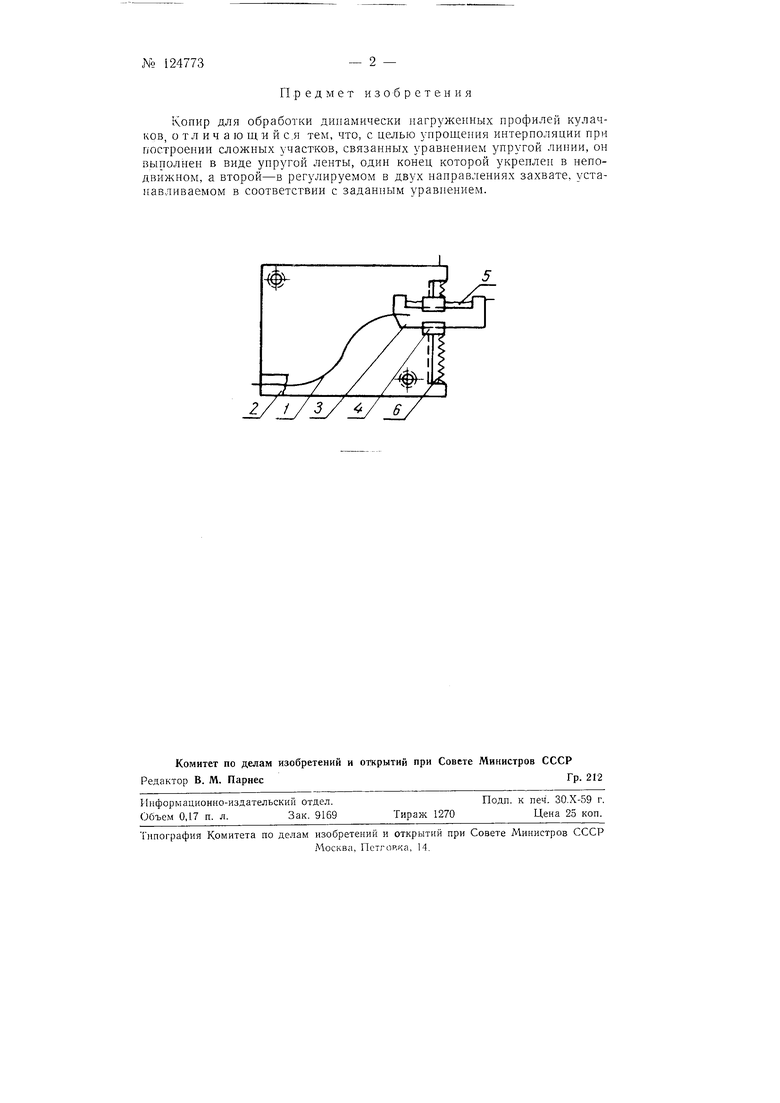
Ма чертеже ноказана схема устройства описываемого копира.
Упругая лента / одпим концом неподвижно закренлена в зажиме -, а вторым-в регулируемом зажиме 3.
Регулируемый зажим 3 раепо.тожен на каретке 4 и нри помощи регулировочного винта 5 может перемеп1,аться в горизонтальном направлепии. Каретка 4 при помопщ регулировочного винта 6 может перемещаться вместе с регулируемым зажимом 3 в вертикальном ноложении. Г1еремен,ая регулируемый зажим 3 в двух направлениях, можно получить заданную расчетную копира, необходимую для обработки TaiiHoro динамически нагрхженного ирофиля кулачка.
Описываемый копир может применяться только при обработке ку.тачков для прямолинейного движения толкателя.
№ 124773 Предмет изобретения
Копир для обработки динамически 1агружеиных профилей кулачков, о т л и ч а ю щ и и с.я тем, что, с целью упрощения интерполяпии при построении сложных участков, связанных уравнением упругой линии, он выполнен в виде упругой ленты, один конец которой укреплен в неподвижном, а второй-в регулируемом в двух направлениях захвате, устанавливаемом в соответствии с заданным уравнением.
- 2 - 
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат тренировки электровакуумных приборов и распыления газопоглотителя | 1959 |
|
SU127761A1 |
| Карусельный полуавтомат для тренировки электровакуумных приборов | 1959 |
|
SU124987A1 |
| Регулируемый копир | 1968 |
|
SU509404A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО ВРАЩЕНИЯ В ШАГОВОЕ | 1991 |
|
RU2022184C1 |
| Автомат для обработки электромонтажных проводов | 1977 |
|
SU936784A1 |
| Устройство для изготовления рулонных пружин | 1976 |
|
SU654329A1 |
| Устройство Г.В.Зекцера для шаговой подачи длинномерного материала | 1983 |
|
SU1096181A1 |
| ТЯГОВОЕ УСТРОЙСТВО ВОЛОЧИЛЬНОГО СТАНА | 1992 |
|
RU2063280C1 |
| МЕХАНИЗМ ТОЧНОЙ ПОДАЧИ В ДЕЛИТЕЛЬНЫХМАШИНАХ | 1965 |
|
SU175250A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
jy±
